车载称重系统研究综述
2022-06-10付宏勋刚宪约乔欢波
付宏勋,张 宇,赵 强,刚宪约,乔欢波
(山东理工大学交通与车辆工程学院,山东 淄博 255049)
0 引 言
改革开放以来,我国交通运输业飞速发展,与交通运输水平一流国家之间的差距日益缩小,甚至在部分领域已经实现了超越,截至2016年底,我国的高速公路里程稳居世界首位。运输产业作为我国国内生产总值的重要组成部分,将成为本世纪经济发展的重要推力。但随着物流行业的发展、货运车辆在物流行业的广泛运用,各种问题也逐渐暴露出来。
首先,车辆超载问题严重。车辆运输货物时,部分驾驶员为了实现利益最大化,经常超载运输货物[1]。车辆超载严重破坏道路、桥梁、地下管道等基础设施[2-3],威胁道路安全,浪费公共资源。其次,载货车辆称重不便捷。用地磅测量车载货物重量时,需要先空载到地磅上称重,然后装载货物再次称重,这增加了车辆不必要的行驶里程,并且受地磅位置限制,车辆称重不方便。最后,车辆管理效率低。交管部门管理载货车辆通常需要在路口设置检查站,这种检查方式不仅检查效率低,而且还干扰车辆正常通行,堵塞交通[4]。物流公司的载货车辆多,车辆的型号不同、承载量不同、行驶线路不同,这就导致管理者无法对每一辆货车进行有效监管。
为了减少上述问题带来的影响,国内外围绕车辆称重技术开展了一定的研究工作。目前常见的称重系统有静态称重系统、动态称重系统和便携式称重仪。静态称重系统精度高,但称重过程耗时长、效率低;动态称重系统虽然能够测量行驶中车辆的载重[5],但称重设备与车辆是分离的,无法实现对车辆状态的实时监控,并且对无法铺设地下称重设备的偏远地区难以进行超载管制[6];目前广泛使用的便携式称重仪,虽然解决了称重地点固定的问题,但每次都需要根据车轮的间距摆放称重设备,浪费时间。因此,为弥补以上几种称重系统的不足,一种新型的称重系统——车载称重系统(on-board weighing,OBW)被提出。
本文简要概述了车载称重系统的基本构成、工作流程、发展历史和功能拓展,具体阐述了车载称重系统在测量方法、降噪算法和称重算法方面的不同实现方式,并对比分析了不同实现方式各自的优缺点及适用场景。最后归纳了车载称重系统存在的不足,并给出了相应的解决方案。
1 车载称重系统简述
与静态称重系统、动态称重系统和便携式称重仪不同,车载称重系统直接安装在车辆上,是一种测量车辆装载量的全自动称重仪器,在农业、林业、煤矿、港口、垃圾运输等运输称重行业使用广泛。称重系统一般由数据采集装置、数据处理装置、功能装置和电源装置四部分组成,如图1所示,主要用于实现获取车载货物重量和车辆超载报警提醒功能。图1所示的车载称重系统工作流程为:数据采集装置用于采集车架的应变模拟信号,将应变模拟信号转化为应变数字信号发送至数据处理装置,数据处理装置经计算处理后得出车载重量值,然后数据处理装置控制功能装置实现相应的功能,电源装置为整个称重系统提供稳定的电压。因为设备直接安装到车辆上,车载称重系统做到了从源头管理车辆,并且车辆不受位置限制可随时称重,提高了相关部门和车辆管理者的管理效率[7]。

图1 车载称重系统结构组成和工作流程图
针对车载称重系统,许多学者进行了相关的研究工作。Carlson[8]提出了基于称重传感器的车载称重系统,该专利最早提出车载称重系统这一概念,为车辆称重技术提供了新的发展思路。Jerry[9]发明了一种称重传感器,该传感器高度低于传统的称重传感器,能有效降低装有车载称重系统的车辆的重心,提高了行驶安全性,该发明推动了车载称重系统的发展。Kheiralla[10]等研究设计了安装于轮式装载机上的车载称重系统,该研究将车载称重系统从载货车辆推广到工程机械上,大大拓宽了车载称重系统的应用场景。目前国外研制的车载称重系统在称重精度、可靠性和使用寿命等方面已经达到了较高的水平,系统可保证一年的称重精度并且正常工作的平均时间超2 000 h[11]。因此在2014年,欧洲提议将车载称重系统作为车辆超载处罚依据之一,列入道路交通管理法律之中。
随着称重技术的发展,车载称重系统可以拓展除称重以外的其他功能。车载称重系统可以包括车载称重端、远程监控端、移动端和无线通信网络等部分,如图2所示。系统集车载称重技术、GPS技术、无线通信技术、物联网技术、云储存技术于一体,不仅可以实时获取车辆载重,还可以对车辆位置、行驶速度和行驶路线进行实时监控[12-13]。该系统的提出,实现了车载称重端、远程控制端、移动端和储存平台在数据方面的交互与共享。
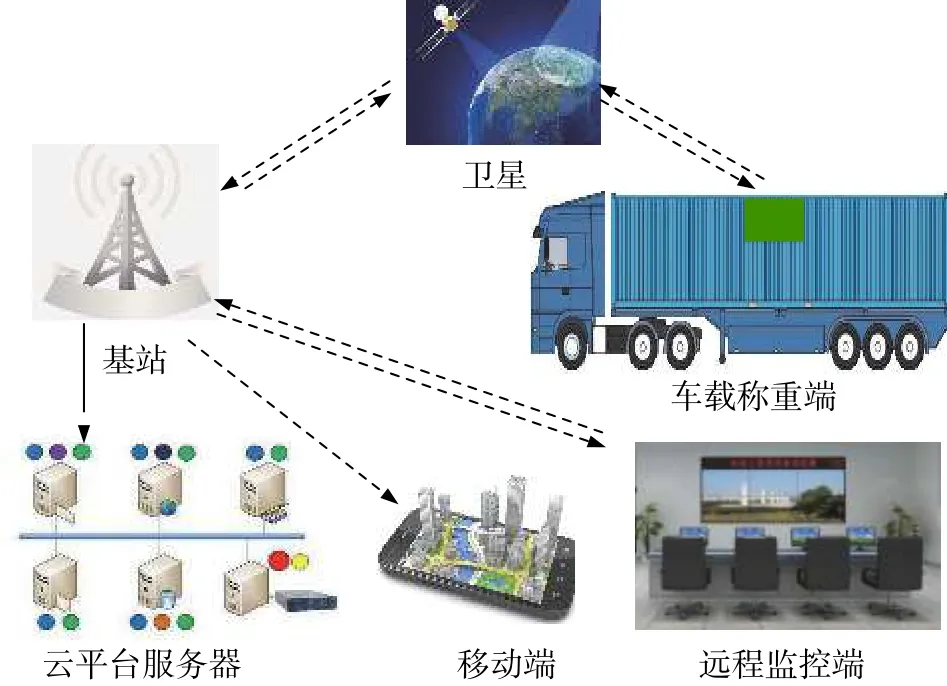
图2 车载称重系统构成原理
2 车载称重系统测量方法研究
车载称重系统可选择的测量方法有多种,测量方法的异同体现在使用传感器的种类、传感器的安装位置和采集数据的类型上。根据系统采集的数据与重量的对应关系,车载称重系统的测量方法可分为直接测量法、间接测量法和质量追踪法。
2.1 直接测量法
由传感器或传感器组直接承受货物载荷,进而实现称重的方法称为直接测量法。张从力[14]等研究了一种应用压力传感器的车载称重系统,将压力传感器组安装在车厢和底盘之间,通过对单个传感器测得的载重求和,实现测量货物的总体载重,其压力传感器的安装位置如图3所示。使用这种方法的车载称重系统测量精度比较高、在技术方面容易实现,但对直接承受载荷的传感器有较高的强度要求,并且安装传感器需要对车辆的承载结构进行相应的改变。

图3 压力传感器安装位置示意图
2.2 间接测量法
车辆受载时,货物的重力经车厢传递到车辆上的各个受力部件,因此可以在车辆受力部件上安装传感器,采集受力部件上随载荷变化而变化的数据,通过建立采集数据与载荷的对应关系实现称重,这种测量方法称为间接测量法。常见的间接测量法设计方案如表1所示[15-17]。

表1 间接测量法设计方案
阚鹏飞[18]提出,车辆承载后悬架会发生变形,通过使用位移传感器测量车架与车桥间的相对距离来测量车辆载荷;李翔[19]等提出了基于胎压监测的车载称重系统,在使用胎压传感器实时测量车辆胎压的基础上,将胎压变化转换为车辆载荷信息,进而实现车辆超载检测;陈广华[20]等设计的车辆超载监测系统,通过在车辆板簧表面安装粘贴式应变传感器,采集每个板簧受载后产生的应变,根据应变与载重的对应关系求得单个板簧的载重,然后求和实现测量车辆总载荷。其中位移传感器、胎压传感器和应变传感器的安装位置示意图如图4所示。

图4 传感器安装位置示意图
理论上货物的重量经车厢传递到车辆上的各个受力部件,通过建立采集数据与载荷的映射关系可以求得车辆载荷,但实际上车辆装配时各部件之间存在装配公差和内应力,在系统标定时需要进行大量实验以消除装配公差和内应力对称重精度的影响,因此间接测量法在精度和标定便捷性方面不如直接测量法。但目前大部分车载称重系统都采用间接测量法,因为该方法不需要改变车辆原有的承载结构,系统安装方便,相比直接测量法安全性高。
2.3 质量追踪法
城市垃圾收集车可以通过举升装置单独称量每桶垃圾的重量,然后自动累加计算垃圾总重,实现测量车载总重量,这种测量方法称为质量追踪法[21-22]。对于带有举升装置的特种车辆,不需要考虑车辆整体的承载情况,只需要在举升装置上安装称重装置,测量每次举升时货物的重量即可,因此采用这种测量方法的车载称重系统使用的传感器数量少。
以上三种测量方法均可以求得车载质量,设计车载称重系统时要根据具体需求来选择合适的测量方法。综上所述,每种测量方法的优缺点和适用范围如表2所示。

表2 常用测量方法
3 车载称重系统降噪算法研究
车辆行驶过程中,由于车辆加减速、发动机的转速、路面不平整等因素的影响,会使传感器采集的信号中混入一些噪声信号,这些噪声信号严重干扰计算结果的精度,因此需要对传感器采集的信号进行降噪处理,去除其中的噪声信号。其中常用的降噪算法主要有以下几种:小波阈值降噪、算数平均滤波、防脉冲干扰平均滤波、滑动平均滤波和中值滤波。
3.1 小波阈值降噪
小波阈值降噪法认为有效信息中混入的噪声信号为高斯白噪声,且噪声信号在小波域对应的系数满足高斯分布特性[23],即如果在小波域噪声系数对应的方差为α,那么绝大部分噪声系数都位于[–3α,3α]区间内。因此,只要将位于区间 [–3α,3α]内的系数全部置零,就能在稍微损伤有效信号的前提下去除绝大部分的噪声信号,小波阈值去噪过程如图5所示[24]。
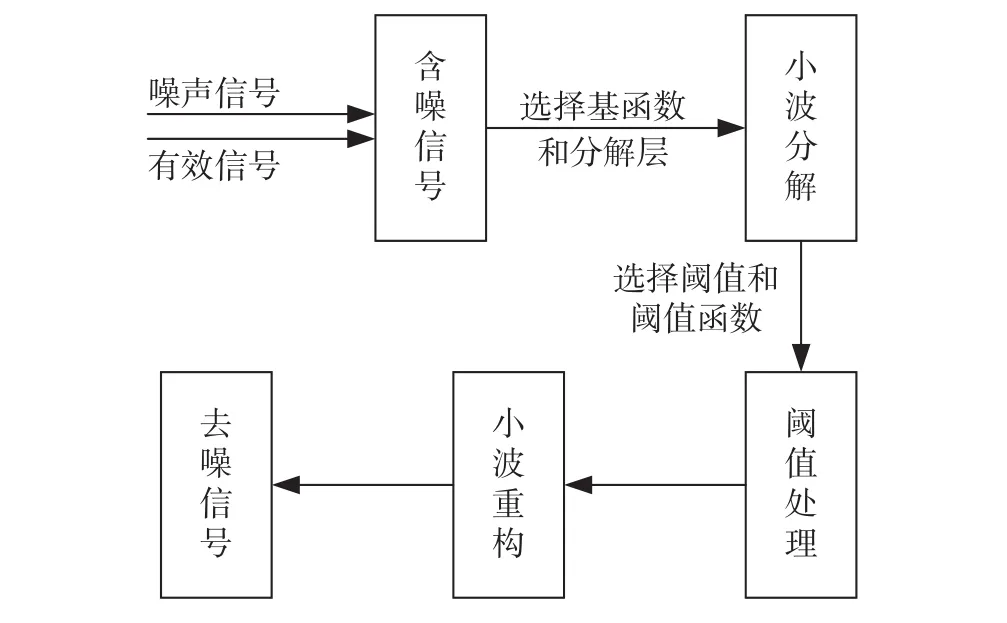
图5 小波阈值去噪过程
郝晓娴[25]使用Matlab软件对车载称重信号进行了小波阈值处理,处理前后的AD采样值对比图如图6所示,从图中可以看出,经过小波阈值去噪算法处理的信号与含噪信号相比,变得光滑平缓。
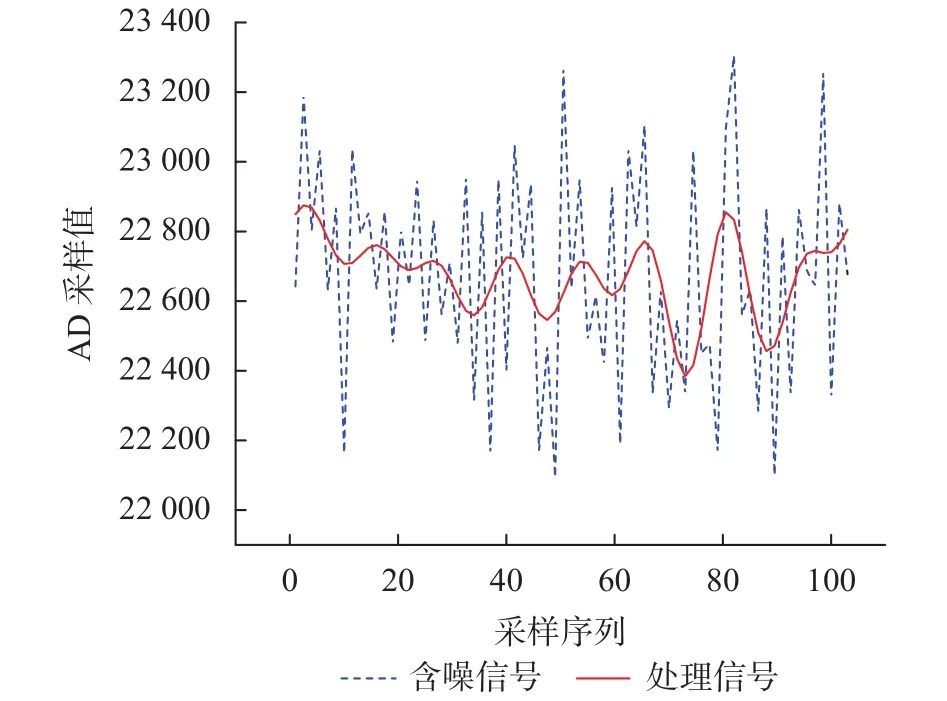
图6 小波阈值去噪对比图
小波阈值降噪算法因其适用范围广、计算速度快,在多种小波降噪算法中的使用频率最高。但在车载传感器采集信号不连续的位置,去噪后会产生伪吉布斯现象,并且称重信号的去噪效果受阈值影响,选择阈值的方法有多种,需要根据具体情况选择合适的阈值。
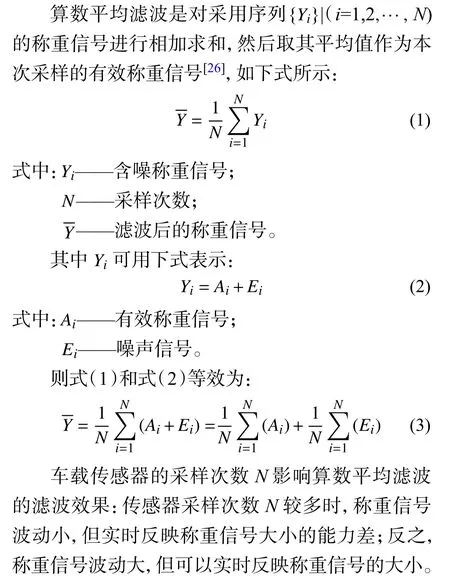
3.2 算数平均滤波
3.3 防脉冲干扰平均滤波
防脉冲干扰平均滤波算法首先将车载传感器采样的称重信号{Yi}|(i=1,2 , ···,N,其中N>3)按采样值大小进行排序,即然后删除其中的最大、最小值,剩余称重信号的算数平均数即为滤波后的有效称重信号[27],如下式所示:
N——采样次数;
——滤波后的称重信号。
该方法可以有效的去除称重信号中的突变信号,并且计算方便、速度快、存储量小,但每获得一个有效的称重信号必须连续采样N次,因此该降噪算法不适用于对载重量的获取有较快速度要求的车载称重系统。
3.4 滑动平均滤波
滑动平均滤波法将N个车载称重数据看作一个队列,队列中每采集一个新的称重数据,就删除其中最早采集的称重数据,维持队列中数据的个数不变,然后取这N个称重数据的平均值,作为当前的有效称重数据[28-29]。这种降噪算法抑制周期性干扰效果好,但不灵敏,抑制脉冲干扰效果差,所以适用于高频振荡系统,对于经常在有严重脉冲干扰的地方工作的承载称重系统,不适合用该降噪算法。
3.5 中值滤波
中值滤波算法的降噪原理是:将称重数据看成一个序列,先计算以某一称重数据为中心点的邻域的中位数,然后替换相应位置的原称重数据,对称重序列中的每个数据都进行此操作,即完成了对称重数据的降噪处理[30]。中值滤波算法是一种非线性滤波技术,利用该降噪算法可以对称重数据进行平滑处理,能有效滤除偶然的数据波动,但对快速变化的数据滤波效果差。
以上五种降噪算法有各自的优势和适用范围,需要针对噪声的类型和系统的工作环境选择合适的降噪算法,也可以将几种降噪算法结合使用,或者根据几种降噪算法的优点,设计新的降噪算法,以达到最佳的降噪效果。综上所述,各种降噪算法的特点对比和使用范围如表3所示。

表3 常用降噪算法
4 车载称重系统称重算法研究
传感器采集的数据,经降噪处理后需要带入称重算法,才可以得到精确的称重结果,如何计算处理降噪后的称重信号,是车载称重系统的关键。目前应用比较广泛的称重算法主要有支持向量机、BP神经网络、RBF神经网络和最小二乘法。
4.1 支持向量机
支持向量机(support vector machine, SVM)是一种基于统计学习理论的学习方法。该方法的基本原理是寻找一个分类线,该分类线不仅能够将所需的数据从整体样本中分开,而且分开的间隔是最大的,即该分类线为最优分类线[31],如图7中的L所示。对于不能使用线性分隔的样本,需要将输入量通过非线性变换映射到高维空间,然后在高维空间进行划分求解[32]。

图7 最优分类线示意图
林颖[33]等通过对车架的三维模型进行有限元仿真,分析了应变和载荷之间的关系,然后使用Matlab软件实现了基于SVM的称重算法设计,最后用总体样本交叉验证的方法证明,设计的算法适用于多种不同的工况。
支持向量机使用小样本进行学习训练,从称重数据训练样本到重量预测样本的实现效率高,使常见的分类和回归问题得以简化,因此区别于从归纳到演绎的传统统计过程。但是由于支持向量机本身计算过程的限制,使得该算法不适用于称重数据数量大的训练样本。
4.2 BP神经网络
BP神经网络是一种多层前馈神经网络,按误差逆向传播进行算法训练,是目前应用最广泛的神经网络[34],网络模型如图8所示。该算法的工作原理是:为了获得最优的网络模型,需要使用对称重结果影响较大的各种因素的学习样本来训练神经网络,然后将称重信号和影响称重的其他信号作为输入层带入训练好的神经网络,得到的输出层即较为真实的称重结果[35-36]。

图8 BP神经网络模型图
秦伟[37]等使用该算法建立了载重计算模型,利用在轻型货车上进行加载实验得到的数据,在Matlab软件中对神经网络进行训练、检验和预测。最后模型预测误差在5%以内,符合精度要求。郝晓娴[38]将车辆速度、加速度和经降噪处理的称重信号作为BP神经网络的学习样本,建立了车载动态称重算法,最终模型计算载荷误差在2%以内。
BP神经网络适合求解内部机制复杂的问题,网络的三层结构能够做到以任意精度逼近任何非线性函数,有较强的非线性拟合能力,但网络的训练严重依赖称重数据学习样本,需要从影响称重结果的众多数据中挑选出典型的称重数据组成训练样本。
4.3 RBF神经网络
与BP神经网络类似,RBF神经网络也是一种三层前馈神经网络,都需要通过数据样本训练才能得到最优网络模型。相比BP神经网络,RBF神经网络的输入和输出映射功能较强,有唯一最佳逼近的特性,且分类能力好、学习过程收敛速度快[39-40]。
李惠敏[41]设计了基于RBF神经网络的车载称重系统,该网络的输入层为车辆速度、加速度、倾角和经预处理的动态称重信号,输出层为车载重量值。最后用该算法处理实车的试验数据,证明该算法可行。
4.4 最小二乘法
记录车辆在承受不同标准重量时传感器的A/D转换数据,然后用最小二乘法进行拟合,可以得到车载重量与传感器A/D转换数据的载重经验公式,从而达到标定的效果[42-43]。利用该方法可以较为简单、准确地求得车载重量。
虽然每种称重算法的实现原理不同,但都可以处理降噪之后的称重信号。综上所述,每种称重算法的优缺点及适用范围如表4所示。

表4 常用称重算法
5 结束语
车载称重系统在车辆称重方面发挥着重要作用,并且随着研究的深入,车载称重系统实现测量车载重量的方式有多种。本文对车载称重系统的研究背景和意义进行了概述,简要介绍了车载称重系统的构成、工作流程、系统发展和功能拓展,并重点阐述了车载称重系统在测量方法、降噪算法和称重算法方面的研究现状。
虽然车载称重系统逐渐趋于成熟,但在某些方面仍存在不足,为使车载称重系统在车辆称重方面更好地发挥作用,可以对车载称重系统从以下几个方面进行完善:
1)处理好称重精度和系统成本之间的关系。车载称重系统的称重精度与传感器的采集精度和测量方法、降噪算法、称重算法有关,但选择高精度的传感器不利于控制系统成本,所以可以从测量方法、降噪算法、称重算法方面入手,在保证称重精度的前提下降低车载称重系统制造成本。
2)完善车载称重系统的操作系统。为了方便用户操作和防止系统遭人为破坏,可针对车载称重系统开发专用的操作系统,该系统要有友好的用户操作界面,并且具有实时自检功能,如果检测到称重系统工作异常,能及时报警并反馈到监控管理平台。
3)运用大数据和云平台技术。为了方便交管部门和相关管理人员监管车辆的载重情况,可将所有车辆车载称重系统的数据上传到云平台,利用大数据分析预测道路的交通状况,从而可以及时处理车辆的突发情况。
4)增强车载称重系统与车辆的一体性。车载称重系统需要后期安装到车辆上,期间要在车辆上安装额外的供电线路、显示屏等装置,破坏了车辆的一体性,并且稳定性不如车辆自带的中控系统。为了提高车辆的一体性、系统的稳定性,汽车制造商可将车载称重系统与车辆的电气设备进行整合,生产自带车载称重系统的车辆。
