边界保护控制在直升机中的应用
2022-06-09袁文鹏
袁文鹏
(航空工业直升机设计研究所,天津 300000)
0.引言
现代科学技术水平在不断进步,直升机的各项飞行性能也在不断发展。现如今世界空中作战有两个方向:其一是超视距作战。主要是通过电子雷达系统寻找视距之外的目标,进而发射导弹完成摧毁;其二是近视距作战[2]。相关研究文献表明,近视距作战占整个空战的30%,同时为了提高作战效率,直升机要一直保持较大的迎角飞行姿态,这就要求直升机具有较强的超机动能力,才能在大迎角情况完成各种机动动作,例如通过小半径飞行进而改变飞行方向,快速改变直升机指向等。综上分析,超机动能力强弱是能否完成近距作战的关键[3]。
在直升机的超机动飞行的过程中有许多需要注意的约束。边界保护控制系统的目的就是保证直升飞机在不越过这些限制的条件下飞行。在飞行员驾驶的阶段,飞行员通常借助于日常飞行经验以及飞行手册的提示才能够较好的完成直升机超机动飞行阶段的边界保护。此外,直升机飞行员可以凭借常年的飞行经验来粗略判断直升机是否超越界限,这会大大分散飞行员的集中力,考虑到在超机动过程阶段,直升机往往会在飞行包线的边界飞行,飞行员分散集中注意力会造成直升机飞行隐患,甚至造成不可避免的后果,有必要设计一套边界保护控制系统。
有必要对直升机在超机动的过程中施加诸多限制,必须设计一套边界保护控制系统,该系统的主要是保证直升机在不超过诸多限制以及约束下可以安全飞行。在有人直升机方面,飞行员通过日常的飞行驾驶训练以及飞控系统的配合和安全手册的提示下能够完成直升机在超机动情形下的边界保护[4]。有经验的直升机飞行员可以通过飞行经验来判别直升机是否越界,但是这会进一步分散飞行员的注意力,也会进一步增大飞行员的负担,带来一系列的不安全后果,会使得直升机性能难以很好地体现出来,综合以上分析我们必须考虑到无忧操纵。
边界保护控制系统保证直升飞机在进行超机动飞行的过程中能够自动遵循结构、气动控制的限制约束,而不需要飞行员自己注意是否越界,这样飞行员能够实现安全飞行的目标。同时无忧操纵能够保证在飞行边界飞行的相对安全性,能够保证飞行员在最大的操纵范围之内操纵直升机,不用担心越界的问题,同时能够进一步扩展直升机的飞行包线。
1.边界保护控制技术相关研究
1.1 边界保护控制技术发展现状
直升机的边界保护控制在上世纪已经被提出,传统意义上的边界保护控制主要是针对一些直升机状态变量进行约束:直升机迎角、侧滑角、过载、Ma及空速等,通过限制以上的状态变量完成边界保护[5]。这些年来,军用直升机以及民用直升机的边界发展形式不尽相同。军用直升机的边界数据必须要借助于风洞气动数据来计算得出,但是民用直升机可以借助测试飞行实验以及气动系数分析得出。
飞行高度、马赫数、动压等参数基本上构成了直升机的飞行边界,这些参数能够通过限制指令来完成对直升机的限制,法向过载就可以通过限制指令来完成对直升机的限制。此外还有一些其他的参数必须通过限制迎角来间接限制,我们就需要完成对迎角限制器的设计,设计迎角控制系统使得迎角不超过规定的边界,迎角限制器在直升机边界保护控制中具有较为广泛应用[6]。在直升机的超机动过程中,一旦直升机的迎角超出规定的边界范围,直升机就可能会进一步失控,所以有必要限制直升机的迎角,来进一步保证直升机的安全飞行。
1.2 基于RBF神经网络的边界保护控制
该方法是基于自适应在线RBF神经网络,进而完成对受约束参数的预测估计,接着通过动态配平的方法求解出所需指令的边界,最后进一步优化修正指令来实现边界保护,保证直升机在安全可靠的飞行边界之内,进一步地提高直升机的安全性[7]。首先先建立直升机飞行动力学模型,包括直升机的上下旋翼、机身、垂尾、平尾和推进螺旋桨等五大部分气动力学模型,然后在建立全机的非线性飞行动力学模型,最后推算出直升机姿态角与角速率之间的运动学关系方程以及直升机的气动力学方程。
状态算法的主要内容是:通过当前的控制指令以及状态来完成对下一时刻的估计,这样能够保证直升机飞行不越界。首先将状态预测算法计算得到的输入极限输入到边界保护器中,完成平滑饱和处理。相比于控制量限制,指令限制更为有效,本文采用基于指令限制的边界保护控制方法。但是相比于控制量限制,指令限制相对保守,对于控制系统性能产生影响较小。基于指令控制的边界保护控制系统的总体框图如图1所示。
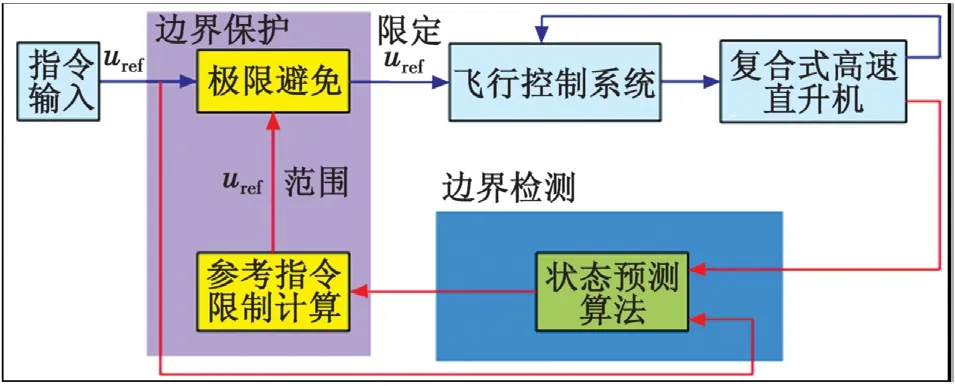
图1 边界保护控制系统
图1中边界检测模块是基于神经网络算法和线性预测模型进而实现对响应的实时预测的。参考指令限制计算则是根据被保护状态量极限值以及预测值来进行动态求取飞行指令边界。极限避免通过适时平滑调节控制器的指令输入来确保直升机飞行状态不超过飞行边界,从而实现边界保护无忧操纵。
基于在线RBF神经网络的边界保护控制分为以下几个步骤:先对受限参数响应进行动态预测,通过动态配平算法以及受限参数的动态响应预测来实现边界保护指令控制,我们借助于线性动态补偿器通过调整预测状态量和实际状态量之间的差值,进而缩小状态估计的动态误差。最后借助于动态配平方法计算得到上下指令边界,并且完成对边界的修正。修正的意义在于相对比于硬切换,软切换能够使位于边界处的指令能平滑过渡到安全区,不会得到不想要的颤振。
通过设计边界保护设计仿真实验来验证直升机俯仰角的边界保护,边界保护仿真曲线如图2所示。根据边界保护仿真曲线分析得出,能够将受限参数的动态响应预测误差控制在5%以内,说明动态响应预测结果比较准确。一旦直升机飞行过程中俯仰角超过飞行包线,此时的预测器就能准确地预测到俯仰角越出边界,这时候通过引入边界保护器,来保证俯仰角一直在我们设定的飞行包线以内。
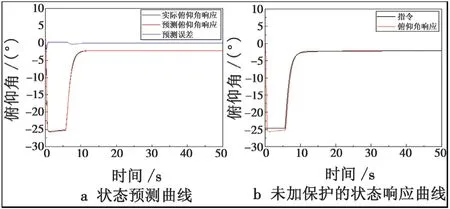
图2 边界保护仿真曲线
1.3 基于LPV模型自适应飞行边界保护控制
我们通过函数替换方法来建立仿射参数依赖LPV(线性参数变化)飞行动力学模型,基于调度变量的动态变化方法来进一步缩小与全量非线性动力学模型之间的失配。能够将飞行边界保护问题进一步转化为约束广义预测控制问题,通过设计数值算法来进一步的完成:舵偏角控制量及其增量、飞行状态等参数的飞行边界保护。进一步的仿真实验表明,线性参数变化模型逼近全量模型效果较好,可以清楚地反映出直升机飞行动态,能够较好地实现飞行边界的保护控制[8]。
首先尝试建立一种可以准确反映出飞行动力学响应LPV模型。函数替换、状态转移以及雅克比线化是LPV建模3种主要的方法。函数替换法的主要原理是:基于每个平衡点,将非线性系统拆分为分解函数模型结构和仿射参数依赖模型两部分。可以通过优化计算来求取分解函数。根据相关研究分析,函数替换法线性参数变化模型相比于其他两种方法,外插能力较强,也能够更好地模拟系统动态。参考纵向飞行动力学建模,图3给出基于线性参数变化模型的自适应控制方案图。
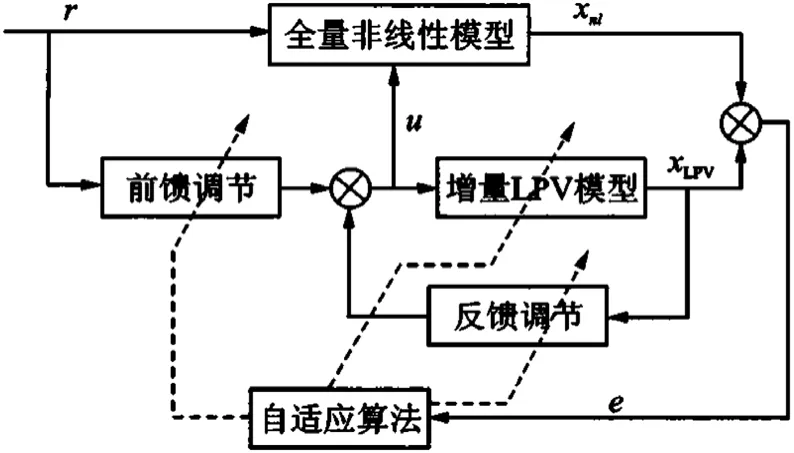
图3 LPV模型自适应边界保护控制
全量非线性模型是一种较为准确的非线性模型,该模型能够较为准确地描述直升机非线性的飞行动力学特性。全量非线性模型的输出能够真实的反映出直升机的输出。LPV模型主要是借助于调度变量的变化来实时追踪全量模型的变化。基于自适应的动态算法来进一步设计反馈调节器,进而实现飞行包线保护控制,飞行边界限制由状态限制、控制增量限制以及其控制限幅组成。反馈调节器具有较强的实时性,可以针对飞行包线限制的动态变化作出迅速响应。
我们有必要完成对边界保护控制算法的设计,外界的扰动能够对状态约束产生影响。综合分析,我们很有必要设计一种满足动态约束变化的边界保护控制算法。在一定的约束条件下,获得解析控制律较为困难,文章计划采用二次规划来完成数值分析,在任何控制周期内,我们通过增量LPV模型完成对预测方程的计算最终形成目标函数,最后完成动态性能测试。设计的LPV模型模拟全量模型的瞬时动态的效果比较好,尤其是处于大迎角状态时,空气动力学状态完全处于气动包线边界,LPV模型能够较好地逼近全量模型,能够较强的适应大范围的动态变化。
设计了一种基于飞行状态控制量以及其控制量增量约束的广义预测控制算法,然后通过二次规划完成数值计算,实时地参考全量模型与LPV模型的匹配完成模型更新,并且最终建立模型参考自适应控制机制。最后进行仿真实验分析,设计的纵向LPV模型模拟全量模型的效果较好,并且能够较为准确地反应出瞬时飞行动态。我们通过广义预测控制算法能够可以将直升机的限制在想要飞行包线范围内,能够进一步实现直升机的无忧操纵和边界保护。
1.4 动态配平方法
动态配平方法是一种基于限制参数的准稳态响应法,这种方法主要是减少快状态对限制参数产生影响。美国科学家Horn首次将基于限制参数的准稳态响应法运用到V-22倾转直升机的迎角和过载限制保护系统里面。亚弗兰克首次将动态配平法和自适应法相互结合起来,借助于自适应的神经网络来补偿模型的不确定性。控制输入与受限参数的关系可以用一阶线性模型表示,把受限参数导数设置为零就能够得到相应的控制输入,进而完成动态配平。最后得到的输入值等同于受限参数达到边界时的理想控制量。只要控制量不超过理想控制量,这样我们的受限参数就不会越界,以上内容简单介绍了动态配平方法主要原理[9]。
在动态配平中,利用神经网络对飞行员控制和飞机限制之间的映射进行建模,该映射被近似反转以用来计算软停止提示的位置,以防止违反包线限制。动态配平法用于在通过V-22上的纵向杆提供提示,防止迎角抖震限制。该方法在飞行模拟中得到验证,并且显著提高了可用敏捷性和飞行安全性。
动态配平估计算法的一个重要优点是不需要直接测量有效参数。动态配平方法有以下几大不足之处:其一,动态配平方法并不适合于所有参数。其二,动态配平方法对应的受限参数的临界值不是瞬态情况下的最大值,而是稳态意义下的最大值,这样的话不能保证瞬态情况不超出飞行边界。其三,在瞬态越界的情况下,动态配平方法解决效果一般。
2.结论
本文研究了直升机超机动过程中边界保护的问题,参考国内外有关于直升机边界保护的研究,总结出几种经典的直升机边界保护控制方法,并且对每种方法给出详细的诠释。最后有以下几点总结:
(1)借助于LPV模型,我们可以使用有约束广义预测控制数值算法来进一步将直升机的飞行状态约束在想要的限制范围之内,进而为建立一套边界保护控制系统打下良好的基础。考虑到在直升机高速飞行以及气流扰动较大的情况下,效果不是很好。
(2)基于RBF 神经网络来进行对直升机飞行状态的实时预测,通过神经网络的预测结果完成对控制输入指令的实时调整,能够进一步保证直升机高速飞行时不超过安全飞行边界。通过进一步的仿真实验验证表明,该方法的边界保护控制效果较好。不仅能够保证直升机高速飞行时不超过安全飞行边界,同时能够进一步提高飞机的可靠性。但是如果直接对指令进行硬切换,会造成直升机姿态角的抖动,也不益于直升机安全,同时该方法的预测误差比较大,需要进一步改进。
(3)动态配平估计方法他需要在所有可能的飞行条件下建立精确地动态配平特性模型,会加大人员的工作量。此外,动态配平方法对于检测在瞬态响应中超过极限的有限参数是无效的,我们有必要克服动态配平估计方法的局限性而设计新的算法.
以上3种方法均具有可实施性,我们可以动态配平方法进行深度研究和改进,RBF神经网络的边界保护控制之前用在高速直升机上面,有必要在直系列直升机以及武装直升机上进行试验。考虑到目前正处在发展的初级阶段,我们必须对相关技术进行深层次研究,基于LPV模型自适应飞行边界保护控制过有约束广义预测控制数值算法可以准确地将直升机的飞行状态约束在飞行包线范围之内。但是我们必须解决在直升机高速运行下和遇着较强的气流扰动下效果较差的问题。通过对以上问题进行改进,进一步在重点型号机上或者模拟器上进行试验验证,不断解决问题,争取找到最优方案。