飞机舵机电动伺服系统的摩擦补偿控制策略*
2022-06-08刘晓琳谢孟岑
刘晓琳,谢孟岑
(中国民航大学电子信息与自动化学院,天津 300300)
0 引言
飞机舵机电动伺服系统作为一种实验室条件下的仿真设备[1],能够对舵机在不同飞行状态下的运行性能进行模拟测试实验,从而为飞机安全飞行提供可靠的理论依据[2-4]。在舵机低速运行时,伺服系统一般按照双向摆动状态运行,运行过程中系统摩擦力在动、静摩擦力之间往复。因而对于有高精度加载要求的电动伺服系统而言,摩擦力产生的影响是不能忽视的[5]。为了提高系统的控制性能,需要对其运行过程中受到的摩擦力影响等问题展开研究。
目前,国内外学者研究的摩擦模型主要分为以下几种,库伦-粘滞摩擦模型[6]、Stribeck模型[7]、Dahl模型[8]、Lugre模型[9]等。其中,在典型的伺服系统摩擦模型中常用Lugre摩擦模型进行表示,该模型可准确的描述系统运动过程中所产生的摩擦力特性。由于Lugre摩擦模型的参数辨识涉及到静态参数辨识与动态参数辨识两部分[10],常采用智能算法对其进行辨识,可有效提高辨识的精度,防止辨识结果陷入局部最优解等不足[11-13]。
本文针对非线性摩擦力的存在会降低飞机舵机电动伺服系统控制精度,且LuGre摩擦模型参数辨识方法复杂,存在辨识结果易陷入局部最优等问题进行了研究,提出一种复合补偿控制方法。该方法首先引Lugre摩擦模型对系统进行数学建模;其次通过改进蜂群算法对摩擦模型进行参数的辨识,避免陷入局部最优解,提高摩擦模型参数辨识精度;最后设计了一种复合控制补偿器,利用辨识后的摩擦模型设计前馈补偿器与改进的重复PID控制器对系统进行双环控制,从而对摩擦力矩进行补偿,提高系统的控制精度。
1 飞机舵机电动伺服系统描述
飞机舵机电动伺服系统结构如图1所示,该系统主要包括工业控制计算机、无刷直流电机、力矩传感器、旋转编码器、舵机等[14]。在实际工作中,工业控制计算机作为系统控制核心元件,主要用来接收力矩传感器和旋转编码器实时采集的无刷直流电机输出力矩信息与舵机的位置信息,并分别向加载电机和舵机发送力矩加载指令和位置伺服指令。
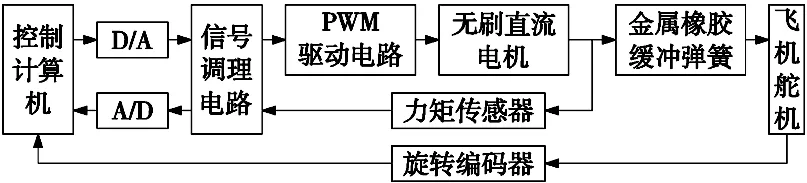
图1 飞机舵机电动伺服系统工作原理图
飞机舵机电动伺服系统的数学模型如图2所示。其中,θr、θm分别为舵机期望角度与实际偏转角度;Kg为加载梯度;Ff为非线摩擦力;Kr为电机输出弧度与角度的转换系数;Ff可由LuGre摩擦模型描述。
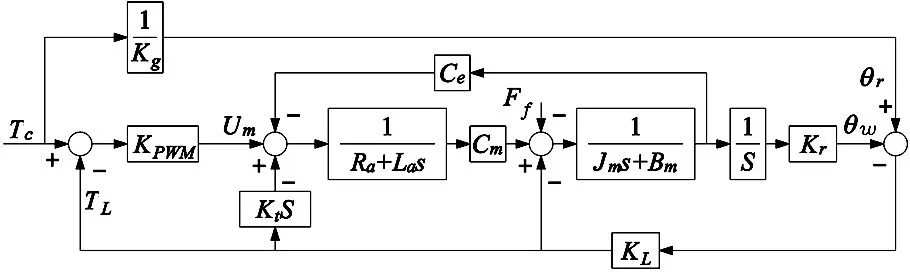
图2 飞机舵机电动伺服系统数学模型
如不考虑多余力矩等其他非线性干扰因素,系统动力学方程为:
(1)
(2)
2 LuGre摩擦模型分析
Canudas de Wit等学者在1995年提出了Lugre模型[15],该模型通过弹性刚毛发生接触、变形且产生相对位移来表示摩擦行为。模型刚毛结构如图3所示。
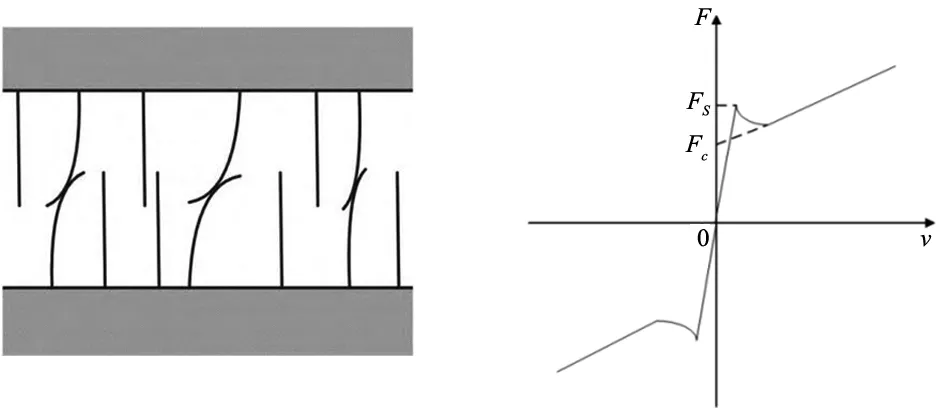
图3 LuGre模型的刚毛结构图4 LuGre摩擦模型曲线
LuGre摩擦模型数学表达式为:
(3)
(4)
(5)
式中,z为刚毛变形量;v为接触面间相对速度;Fc为库伦摩擦力;Fs为最大静摩擦力;Ff为总摩擦力;σ0为刚度系数;σ1为阻尼系数;σ2为粘性摩擦系数;vs为Stribeck速度;vs、Fc、Fs、σ2为静态参数;σ0、σ1为动态参数。
由上式得到的摩擦模型曲线如图4所示。
(6)
将式(6)与式(4)代入式(5)可得:
(7)
根据式(7)可建立系统Stribeck静态摩擦模型,通过对其进行恒速跟踪实验可以实现相关摩擦参数辨识。
3 蜂群算法
3.1 原始蜂群算法
蜂群算法是模仿蜜蜂行为提出的一种优化方法,是群智能思想的一个具体应用。该算法主要通过模拟蜜蜂采蜜过程以达到寻优的目的。蜂群算法主要由引领蜂、观察蜂、侦查蜂三类组成。蜜蜂搜索蜜源的过程主要分为3步。
步骤1:初始化蜜源,引领蜂在全局随机选择蜜源并进行邻域搜索,并记录下当前蜜源信息;
步骤2: 观察蜂根据引领蜂提供的蜜源信息,选择一个食物源,进行邻域搜索;
步骤3:当一个蜜源被放弃时,引领蜂变成侦查蜂,按照式(8)随机寻找新的蜜源,即:
xij=r(ub-lb)+lb
(8)
式中,r为[0,1]之间的随机数;ub、lb分别为变量x的上下限。
引领蜂和观察蜂按式(9)对蜜源进行邻域搜索,即:
vij=xij+r(xij-xkj)
(9)
式中,vij为新蜜源位置;k∈1,2,…,N且k≠i为随机产生的整数;j为第i个蜜源中第j维的位置,j∈1,2,…,D。 观察蜂按照式(10)选择蜜源,即:
(10)
3.2 改进蜂群算法
为了获得LuGre模型的最优参数,提出一种基于改进蜂群算法的参数辨识方法。以原始蜂群算法的基本数学模型为基础,提出以下3点改进措施,使算法具有更好的全局搜索能力与收敛精度。
(1)引入Tent混沌映射方法
Tent混沌映射又称帐篷映射[16],在数学中表现形式为一种分段线性映射。由于映射具有均匀的概率密度和较快的快迭代速度等优点,因此利用Tent混沌映射可以提高算法寻优速度和精度使算法更加高效,解决原始蜂群算法的早熟问题。

(11)
(12)
(2)引入自适应反向轮盘赌概率选择方法
在传统蜂群算法中,跟随蜂根据适应度的大小选择蜜源,蜜源适应度越高,其被选择的概率也就越大。这种选择规则会造成蜂群在不断进化过程中快速向适应度较高的蜜源收敛,反而使得种群的多样性降低以及陷入局部最优解。因此,在传统蜂群算法中引入反向轮盘赌选择策略对式(10)进行改进。该策略可以避免种群的早熟收敛,进而保证了种群的多样性。
为了在蜜蜂选择蜜源过程中对计算偏差大的解迅速淘汰,对偏差小的进一步保留,将自适应因子σi引入蜜源选择概率中,根据解的不同情况作为权值计入,修改后的概率选择如下:
(13)
(14)
式中,σi为解xij的自适应因子,通过调节ε来调整自适应因子淘汰的阈值,前期搜索较大的情况下,误差大的结果在阈值外易被舍弃,加速淘汰较差结果,当系统进一步平稳时,误差基本收缩在阈值内开始迭代计算,这样可以实现解的优胜劣汰,提高算法的收敛精度。
(3)引入动态位置搜索方法
由于在算法执行早期蜜源具有较大的随机性,为了加快算法运行,更快获得全局最优解,在蜜源更新位置时需要更大的搜索步长。在算法执行后期,蜜源的更新位置接近全局最优位置,此时,引领峰和观察蜂在邻域搜索时应该具备较小的搜索步长。鉴于此,对式(9)进行了改进,增加了基于迭代次数的自适应调整系数w来更新迭代步长,其公式为:
(15)
vij=xbest,j+w(fbest-fi)(xij-xkj)
(16)
式中,t为迭代次数;tmax为最大迭代次数;xbest,j为上次最优原蜜源;fbest为当前最优蜜源的适应度值。
4 摩擦参数的辨识与补偿
对系统摩擦力进行消除前,需要借助改进的蜂群算法对摩擦模型的参数进行辨识,以得到准确的摩擦模型。然后利用其辨识结果设计复合控制补偿器对系统进行摩擦补偿与控制。
4.1 静态参数的辨识
(17)

取目标函数为:
(18)
适应度函数为:
(19)
利用改进人工蜂群算法对摩擦模型参数辨识,设置待辨识参数的变化范围:Fc∈[0,50],Fs∈[0,50],σ2∈[0,100],vs∈[0,0.1]。参数辨识的具体工作流程如图5所示,静态参数辨识结果如表1所示。
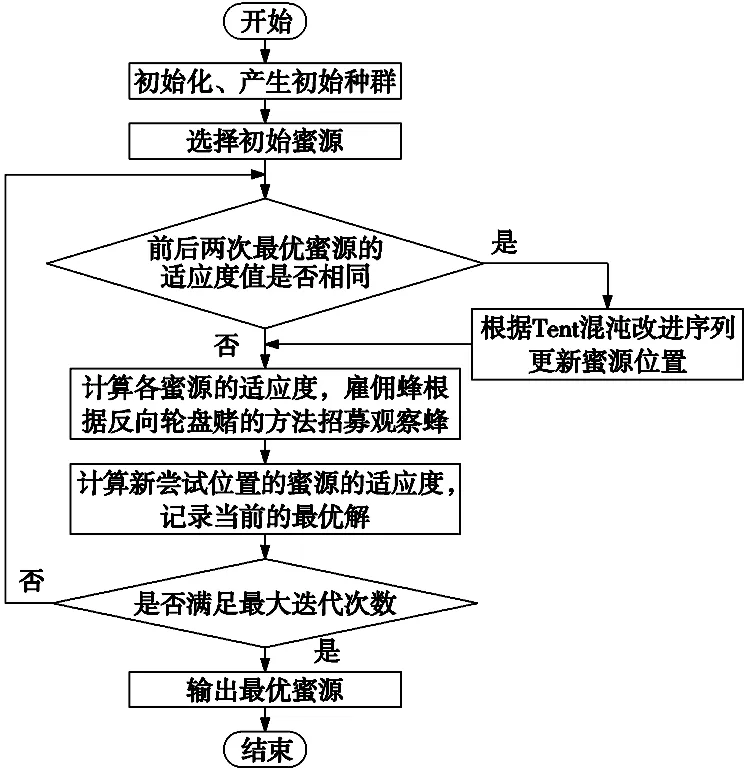
图5 改进蜂群算法流程图

表1 静态参数辨识值
4.2 动态参数估计

(20)
此时的系统可以看作一个二阶数学模型,其具体参数可以利用阶跃响应曲线进行估计。当系统输入阶跃信号时:
(21)


表2 动态参数估计值
综上所述,由表1和表2可以得到LuGre摩擦模型的相关参数,从而为下文的仿真提供一个准确的摩擦模型。
4.3 系统复合控制补偿器
由于飞机舵机电动伺服系统中存在着非线性摩擦力及多种角位置周期性的干扰成分,对系统的平稳性以及位置跟踪精度产生影响。因此提出一种前馈控制补偿器和改进重复PID控制器所构成的复合控制补偿器对系统进行摩擦补偿与控制。
(1)前馈控制补偿器
结合辨识出的LuGre摩擦模型设计前馈控制补偿器对非线性摩擦力扰动进行补偿。
(22)
因此,前馈控制补偿器传递函数为:
(23)
(2)改进重复PID控制器
重复控制器的作用可以减小周期性扰动引起的波形畸变[17]。因此,本文以系统实际输出角位置信号作为研究对象,针对单一重复控制在首周期出现输出延时的问题,在重复控制的基础上加入PID控制组成双环控制,将两种控制相结合可以改善系统受到较大扰动时的振荡和超调现象,获得良好的控制性能。具体工作原理为:将角度传感器输出与参考输入的偏差反馈给PID控制器和重复控制器。在系统刚开始运行时,重复控制器作为积分器,记忆系统误差值。随着系统干扰不断增大,PID控制器会立刻工作,以保证输出波形不会发生畸变,提高系统的鲁棒性。
重复控制器结构如图6所示。

图6 重复控制器结构简图
其传递函数表示为:
(24)
式中,T>0为低通滤波器的时间常数;Ti(i=0,1,2,3)为补偿器的时间常数。
所设计的改进重复PID控制器结构如图7所示。
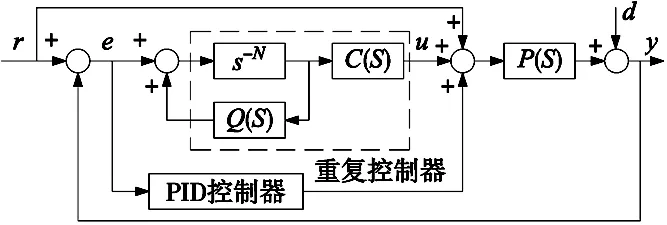
图7 改进重复PID控制器结构简图
加入复合控制补偿器后的系统数学模型如图8所示。
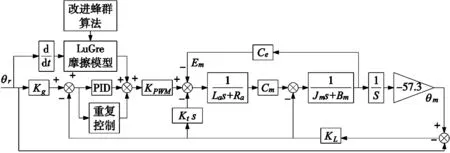
图8 复合控制补偿器下的系统数学模型
5 仿真实验及结果分析
为了验证所设计飞机舵机电动加载系统复合控制策略的控制性能,在MATLAB2016b中搭建系统模型并进行相应仿真实验。设置系统控制器参数及结构参数如下:Cm=0.025,Ce=0.025 v/(r·min-1),J=1.07×10-5kg·m2,B=0.000 043,La=0.001 768 7 H,Ra=1.36 Ω。
5.1 改进ABC算法性能测试实验
为了验证提出的改进蜂群算法的有效性,选取Griewank和Rastrigin作为全局最优测试函数进行仿真验证。
在数学最优化中,Griewank函数是一个数学上常用于测试优化程序效率的函数;Rastrigin函数是可变维多模态函数,用来验证算法的全局寻优能力和局部最优规避能力[18]。测试函数的表达式与相关参数设置分别为:
(1)Griewank函数
(25)
(2)Rastrigin函数
(26)
分别采用改进蜂群算法和原始蜂群算法对两个测试函数进行寻优,寻优过程如图9所示,寻优结果如表3所示。
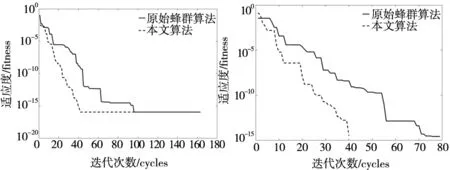
(a) Rastrigin函数寻优过程对比 (b) Griewank函数寻优过程对比图9 寻优过程对比
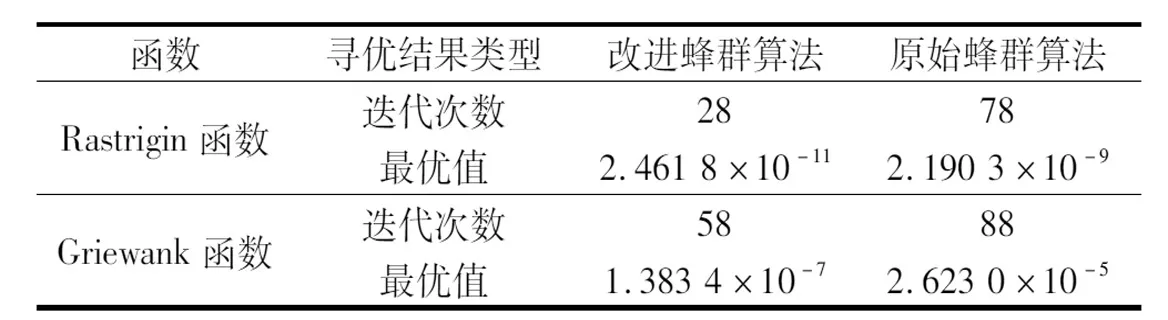
表3 寻优结果对比
分析图9及表3可知,改进蜂群算法对测试函数的寻优在收敛速度、收敛代数及全局最优函数值方面皆优于原始蜂群算法。结果表明,改进蜂群算法具有良好的寻优能力,故可以更加快速且准确地获得LuGre模型的最优参数。
5.2 摩擦模型准确性验证实验
通过静态参数和动态参数的识别,得到飞机舵机电动伺服系统的LuGre摩擦模型如图10所示,通过MATLAB软件对摩擦模型进行仿真分析,得到摩擦力与速度关系曲线如图11所示。
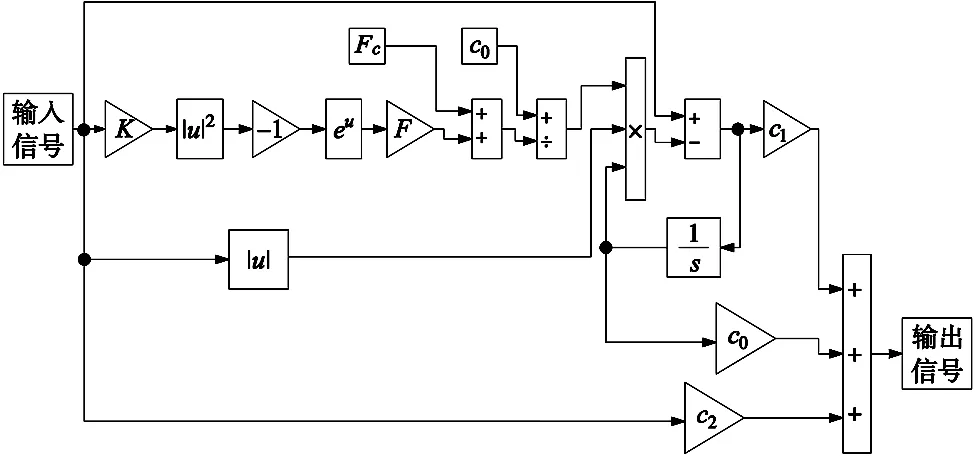
图10 摩擦模型仿真图
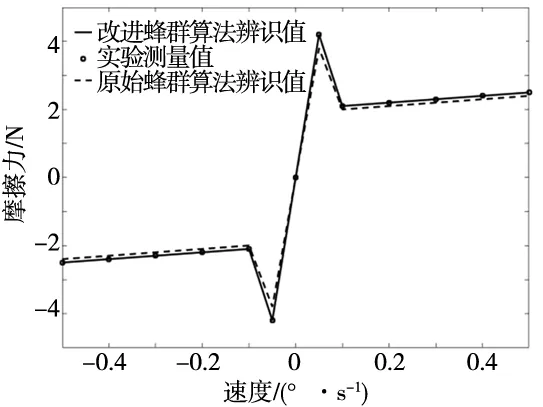
图11 摩擦力-速度曲线
将仿真计算的曲线与试验测试得到的曲线进行比较可以看出,当系统存在外部摩擦扰动时,通过改进蜂群算法所辨识的LuGre摩擦模型仿真计算结果与实验测量结果基本一致,系统的LuGre摩擦模型得到了验证。因此,改进蜂群算法具有良好的辨识效果,可以为系统提供更加精确的摩擦模型,从而提高系统的控制精度。
5.3 指令力矩跟踪、速度跟踪实验
为验证所设计飞机舵机电动加载系统复合控制补偿器的有效性,在MATLAB中搭建系统模型并进行相应仿真实验,LuGre摩擦模型的参数由改进蜂群算法进行辨识得到。设置系统控制器参数及结构参数如下:Cm=0.025,Ce=0.025 v/(r·min-1),J=1.07×10-5kg·m2,B=0.000 043,La=0.001 768 7 H,Ra=1.36 Ω。
考虑到系统实际测试频率为1~20 Hz,设定系统测试输入幅值为6 mm的正弦波信号,在加载梯度为1 T/mm的情况下,设置指令频率分别为10 Hz、20 Hz,系统加载精度实验结果如图12中所示;同时将仿真时间分别设置为0.3 s与3 s,指令力矩跟踪误差如图13所示;系统速度跟随曲线如图14所示。
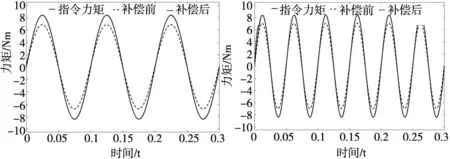
(a) 10 Hz指令力矩 (b) 20 Hz指令力矩图12 指令力矩的跟踪效果
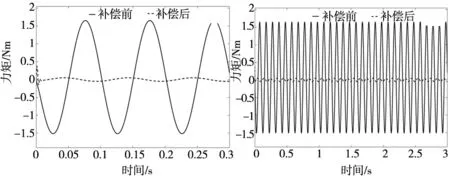
(a) t=0.3 s指令力矩跟踪误差 (b) t=3 s指令力矩跟踪误差图13 指令力矩的跟踪误差
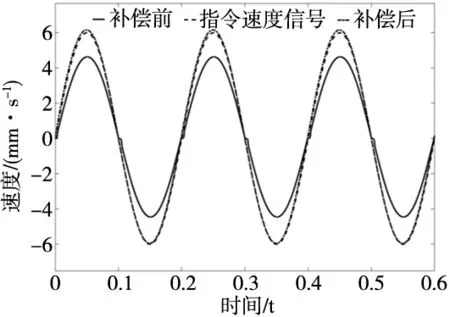
图14 速度跟随曲线
飞机舵机电动加载系统的工作性能应该满足双十指标要求,即指令力矩与实际力矩之间幅差小于10%,相差小于10%。由图12分析可知,在满足系统工作性能指标的基础上,本文所设计的复合控制补偿器处理摩擦等外部扰动引起的非线性干扰力矩能力更强。当频率为10 Hz 时,幅度差约为0.31%,相位差约为0.56°;当频率增加为20 Hz 时,力矩跟踪曲线幅值差为0.2%,相位差为 0.07%,远小于补偿前系统的幅值误差与相位误差,具有优异的力矩跟踪能力。
分析图13可以得到,与补偿前相比,在该复合控制补偿器作用下,系统指令力矩跟踪误差值由1.86 Nm降至0.23 Nm,减小了约87.6%,同时将仿真时间由0.3 s延长至3 s,系统误差值也一直在0 Nm上下小幅波动。实验结果表明,该复合控制补偿器具有良好的稳定性,对摩擦力矩有良好的补偿效果。同时分析图14可以发现,由于摩擦力的存在,速度跟踪的过零位置附近出现了滞后现象,而加入复合控制补偿器后,期望速度曲线与实际速度曲线基本重合,误差几乎为0,极大程度消除了速度过零滞后现象。实验结果表明,在复合控制补偿器作用下系统具有优异的鲁棒性,能够对加载指令进行持续稳定跟踪,提高了系统的控制精度。
6 结论
本文针对飞机舵机电动伺服系统存在摩擦干扰问题,采用改进蜂群算法对系统摩擦参数进行辨识,并设计复合控制补偿器对辨识结果进行补偿与控制。通过增加原始蜂群算法的自适应性,以提高其全局搜索能力和收敛精度。仿真实验结果分析表明,采用改进蜂群算法参数的辨识效果精确度更高,模型辨识误差由12%下降至5%;同时所设计的复合控制补偿器对摩擦力矩有良好的补偿效果,系统指令力矩跟踪误差值由1.86 Nm降至0.23 Nm,减小了约87.6%。由此可见,该控制补偿策略可以有效降低摩擦力矩对系统控制性能的影响,从而提升控制精度。