用于人体姿态检测的微波雷达研制
2022-06-08夏燕超
夏燕超, 王 彦, 郭 灵
(南华大学 电气工程学院,湖南 衡阳 421001)
0 引 言
多普勒雷达是微波雷达的一种,它是基于多普勒效应,通过检测辐射到空间中并由目标物体反射回来的回波信号来工作。回波信号中包含了十分丰富的目标信息,比如目标的存在,目标距离雷达的远近、角度等。随着软件算法技术水平的提升,还可以识别出与目标有关的更为精确复杂的信息[1]。
姿态检测最初是作为人工智能领域一个重要的研究方向,但是随着相关技术研究的深入,与姿态检测技术相关的的研究成果开始向其他行业推广并逐渐转化成型。姿态检测技术不仅在智能监控、自然人机交互、虚拟现实体育训练、医疗康复锻炼、智能监控等领域得到了广泛的应用,在健身运动、体感游戏等新兴消费领域也显示出巨大的应用潜力,极具广阔的应用前景[2]。
常规具有姿态检测功能的微波雷达的主要工作过程是:雷达传感器检测到回波信号后首先进行预处理,将一维信号转换为二维信号,最大程度上对姿态特征进行提取,同时滤除其他的干扰信号。然后再根据预处理的结果使用相关的算法进行识别与分类,与相应的数据库进行比对,最后完成姿态检测的功能。整个过程涉及到了大量的数据处理过程,对训练样本的质量和数量也都有很高的要求,这无疑增加了整个产品的研发成本[3]。
本文将设计一款能具有基本人体姿态检测功能的多普勒微波雷达,通过对硬件电路的合理设计,能大幅度降低软件算法复杂度。该成品可用于智能家居和智能医疗领域。在智能家居领域,通过检测人的躺、坐、站等基本姿态进行行为预测,开启相关的电子智能设备;在医疗领域,可用于随时检测病床上病人的呼吸心跳,保证医护人员对病人出现的突发状况做出及时的应对;同时,在日常的照明应用中也有广阔的发展前景。整个系统电路主要由扇形波束天线、一体化混频接收电路、人体信号检测电路等部分组成。
1 扇形波束天线
传统的微带天线由于介质板材、辐射贴片的形状等因素限制,单个天线增益一般在6 dB~8 dB。为了实现特定方向性和高增益的目的,工程上往往需要多个阵元天线组成阵列天线进行工作。本文为了实现姿态检测功能,需要工作天线辐射出类扇形的探测波束。为了达到这个目的,可以将若干个微带辐射贴片组成微带直线阵列天线。
对阵列天线进行设计时,需要先对阵元天线进行设计。微带天线工作时,辐射贴片的上方是自由空间,下方是介质基板。天线并没有存在于一个均匀的介质中。因此为了简化计算,常常引入有效介电常数εe对天线进行分析,这等效于微带天线工作时处于介电常数为εe的均匀介质中。已知介质的相对介电常数为εr,则εe的表达式为:
(1)
式(1)中w为矩形贴片的宽度,表达式为:
(2)
其中式(2)中λ0为真空中的电磁波长,根据经验公式可知矩形微带贴片的长为
(3)
其中式(3)中l′为修正量,表达式为
(4)
已知Rogers RT/duroid 4003的相对介电常数为3.55,当作为介质基板材料时根据上述公式计算可知,理论上微带天线获得最大辐射效率时的初始尺寸宽W0=16.5 mm,L0=13.0 mm,以此为阵元设计阵列天线[4-6]。
通过研究发现,当矩形微带天线不同方向激励电流的流径差别到达一定程度时,天线的辐射特性就会发生改变。本文对天线阵元采用了改进的弧形结构,减小了辐射贴片的面积,增加了激励电流信号的流径,加大天线与参考地之间的耦合作用,从而改变了天线的辐射特性。最终阵列天线如图1所示。

图1 扇形波束天线Fig.1 Antenna with sector beam
整个阵列天线采用同轴串联馈电,对于奇数阵元而言,这种方式可以大幅度减小天线的体积。两侧的阵元之间采用插入法进行阻抗匹配,可以灵活调整天线的的阻抗。并通过调整天线的整体尺寸参数使得天线的输入阻抗与馈电端口达到阻抗匹配。通过三维电磁仿真软件High Frequency Structure Simulator(HFSS)对天线进行多次仿真优化得到天线的最佳尺寸参数为:阵元间的间距d≈24 mm,天线的整体尺寸24 mm×70 mm×1.07 mm。仿真后的天线增益如图2、图3所示。
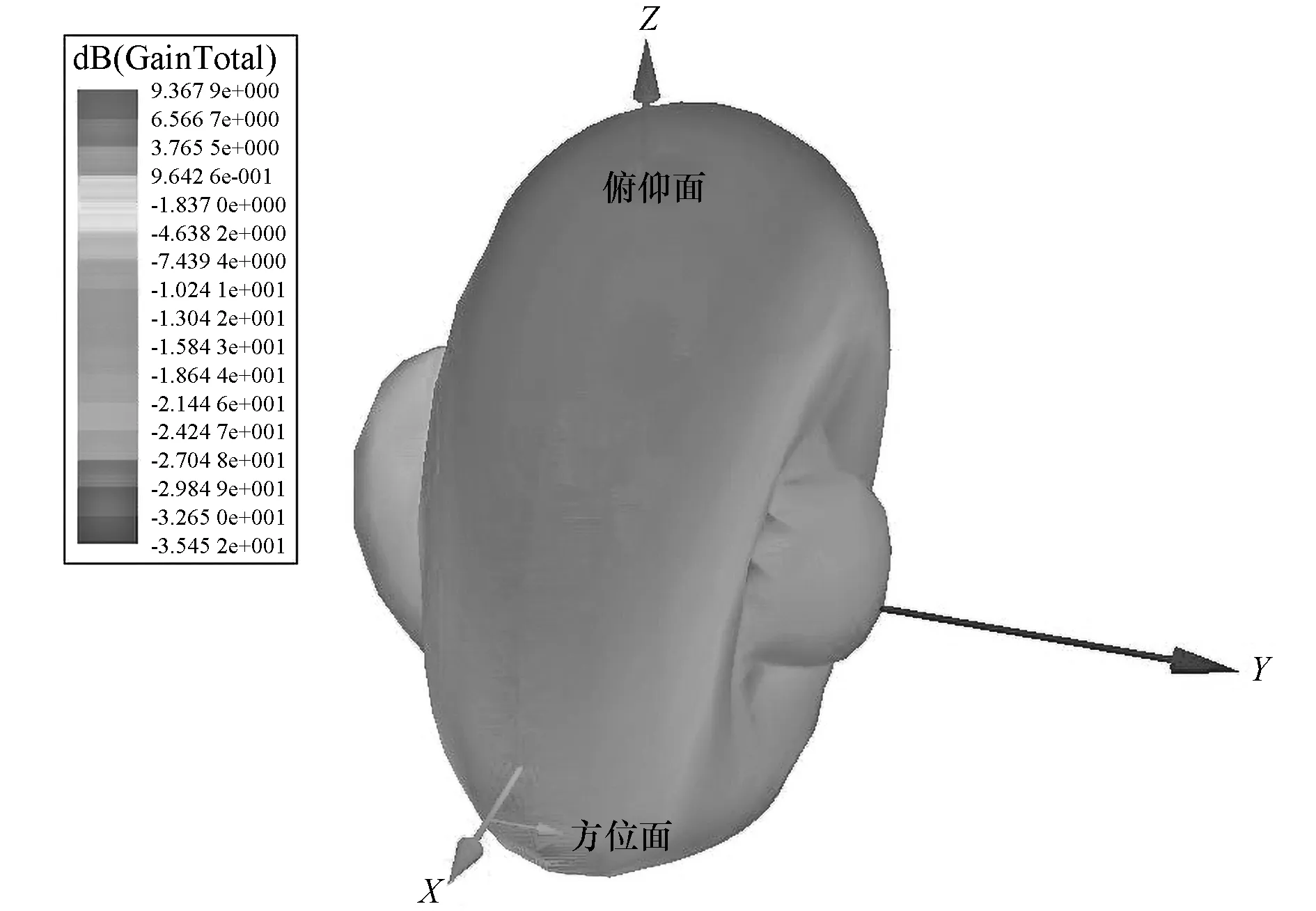
图2 天线三维方向增益Fig.2 Three-dimensional gain of antenna
从图2天线的三维方向增益图可知,天线的整体辐射特性类似扇形,增益达到了9.4 dB,同时两侧有一定水平的副瓣,但是阵元的数目较少,因此可忽略较小副瓣的影响。从图3天线的二维方向增益图可以看出E面和H面的半功率波束宽度(half-power beam width,HPBW)分别为105°和31°,辐射特性相比常用的探测天线发生了大幅度的改变,E面的HPBW大幅度提高,H面的HPBW大幅度降低。
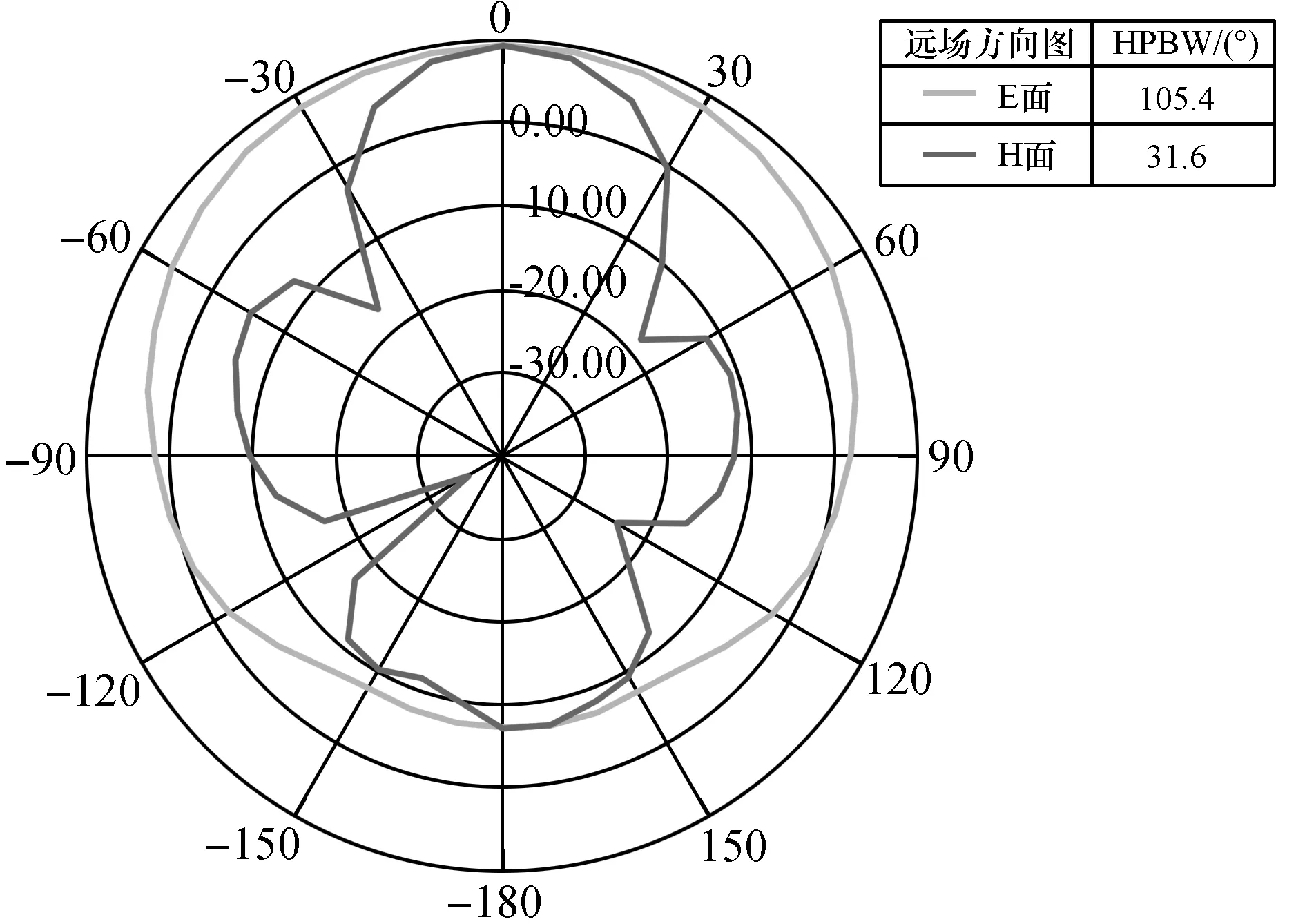
图3 天线二维方向增益Fig.3 Two-dimensional gain of antenna
电压驻波比(voltage standing wave ratio,VSWR)指驻波波腹电压与波谷电压幅度之比,是衡量天线工作时损耗大小的重要参数。通过HFSS仿真优化后,阵列天线输入端口的VSWR曲线如图4所示,阵元天线和阵列天线在5.5 GHz~6.3 GHz范围内的VSWR对比曲线如图5所示。从图4、图5可以得知,在5.8 GHz处,阵列天线的输入端口的电压VSWR的值相比阵元天线更近理想状态下的1。天线的仿真结果证明了扇形波束天线设计的合理性,并且能较好的满足工程上的需求。
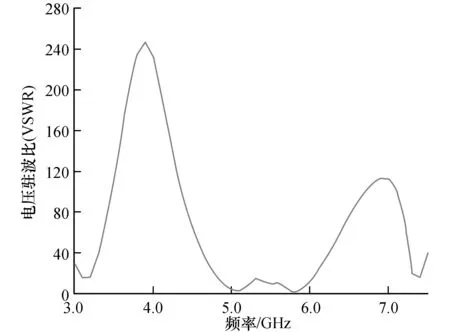
图4 天线的输入端口VSWRFig.4 VSWR of input-port for antenna
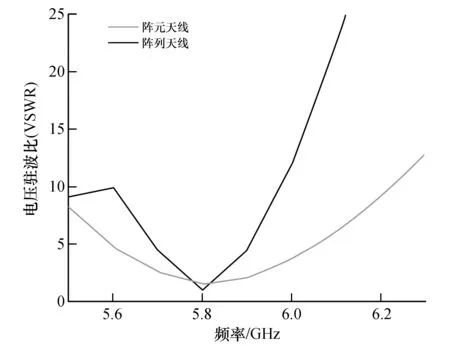
图5 阵元天线和阵列天线的VSWRFig.5 VSWR of element antenna and array antenna
2 混频电路设计
混频器一般视为一个三端口器件,具有两个信号输入端口和一个信号输出端口。混频电路的核心是非线性器件,两个不同频率成分的输入信号经过非线性器件后会产生一系列不同于输入信号频率的新信号,经过滤波器进行滤波后就可以得到所需频率的信号[7-8]。
本文设计了一体化混频电路,具有发射、接收、滤波、混频以及输入输出阻抗匹配的功能,能在保证基本接收功能的同时,有效减小了微带电路的面积。混频电路采用肖特基势垒二极管作为混频器件,结构为微带平衡混频电路。导入肖特基势垒二极管工作时的参数建立模型后,使用射频电路设计软件Advanced Design System(ADS)进行原理图和Momentum电路的联合仿真,整体电路如图6所示,仿真后的主要参数如图7所示。
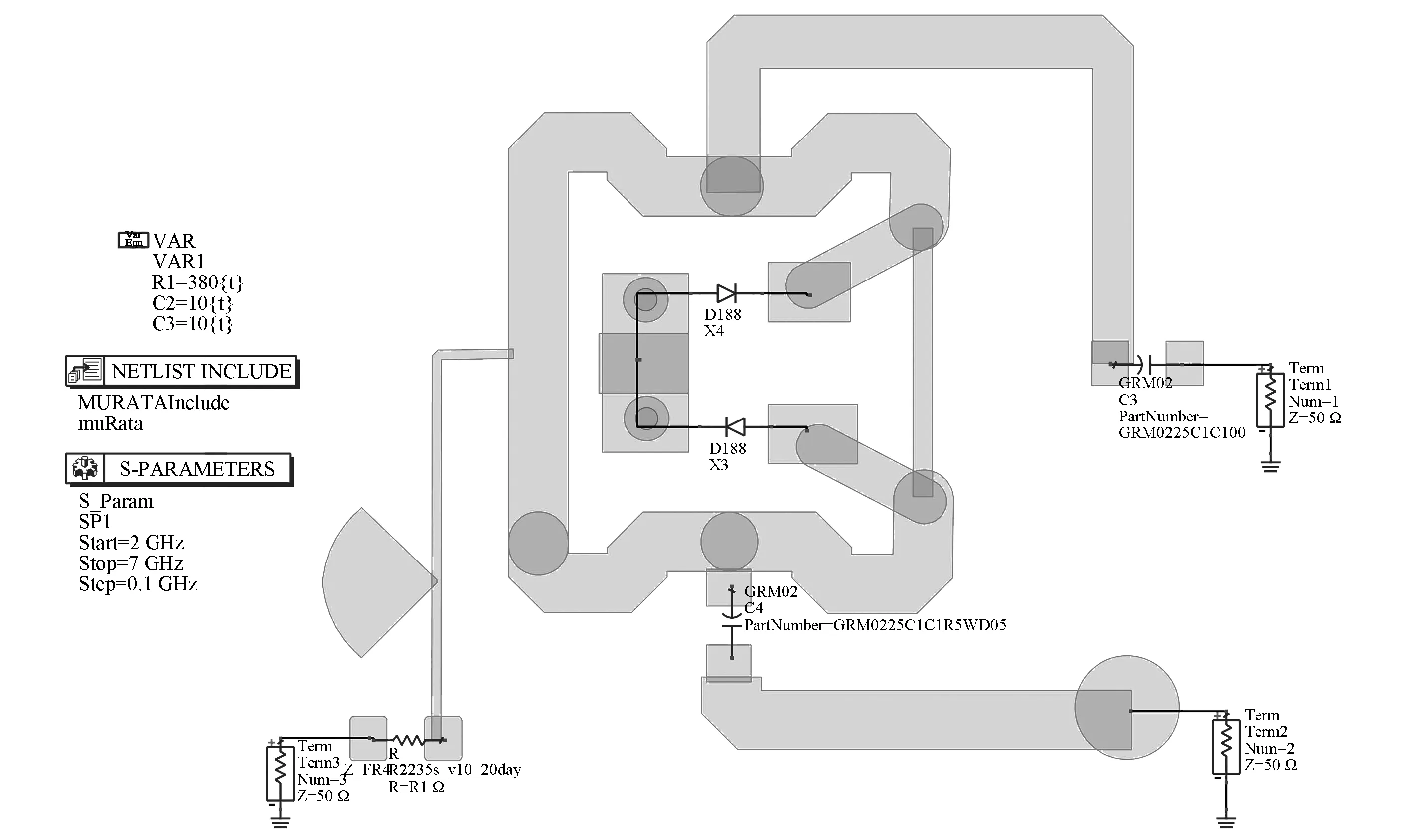
图6 混频电路结构Fig.6 Structure of mixer circuit

图7 输入输出端口电压驻波比Fig.7 VSWR of input and output ports
从图7可以得知输入输出端的电压驻波比在5.8 GHz处分别为1.2和1.1,十分接近1。这说明了此次设计的混频电路结构的输入输出阻抗匹配较好,微波信号通过混频电路进行发射和接收时可以很大程度上减少传输过程中的介质损耗,从而可以进一步提高混频之后的中频信号的峰值。
3 人体信号检测电路
人体信号是由人体在日常生活中发出的包含特定信息的信号。目前常见的人体信号主要有动作信号、脑电信号、心电信号呼吸/心跳信号等。许多人体信号在电路系统中都属于微小信号的范畴,信号电压幅值一般在几十微伏特至几个毫伏特之间。这些信号如果不经过放大、滤波等环节的处理,很难对其进行识别并加以运用。目前国内外尽管有一些特别精密的仪器设备可以直接检测、分析并运用这些信号,但是仪器设备价格相对高昂。因此采用普适性较好,成本较低的微小信号检测电路是十分有必要的[9]。
本文的人体信号检测电路主要针对人体的移动信号、微小动作(微动)信号以及呼吸信号进行检测。电路设计的主要理论依据是多普勒效应,由多普勒频移公式得知,对于固定波源的多普勒微波雷达,被测移动物体的信号频率与发射源的频率关系为:
(5)
式(5)中fd为多普勒频移的频率,单位为Hz;f为波源频率,Hz;c为电磁波在介质中传播的速度,m/s;当介质为空气时,c为光速;v为被测物体的移动速度,m/s;θ为被测物体与波源之间的夹角,(°)。根据多普勒频移公式可以计算出工作频率下相应的人体信号对应的频率范围,进而设计相应的滤波放大电路[10]。
当波源的工作频率为5.8 GHz时,混频后输出的常规人体移动信号在15~40 Hz的范围内,微动信号在1~7 Hz的范围内,呼吸信号在250~500 mHz的范围内。值得注意的是混频输出的信号幅值特别低,如果不经过放大电路的处理则不能被常规使用的单片机检测到,也就无法进行实际应用。
上述三种人体信号中,移动信号的电压幅值最大,微动信号的电压幅值次之,呼吸信号的电压幅值最小。基于上述考量,除了对信号检测电路的通频带加以限制外,还需要考虑整体电路的放大增益。通过电路仿真软件Multisim设计了人体信号检测电路,如图8、图9、图10所示。
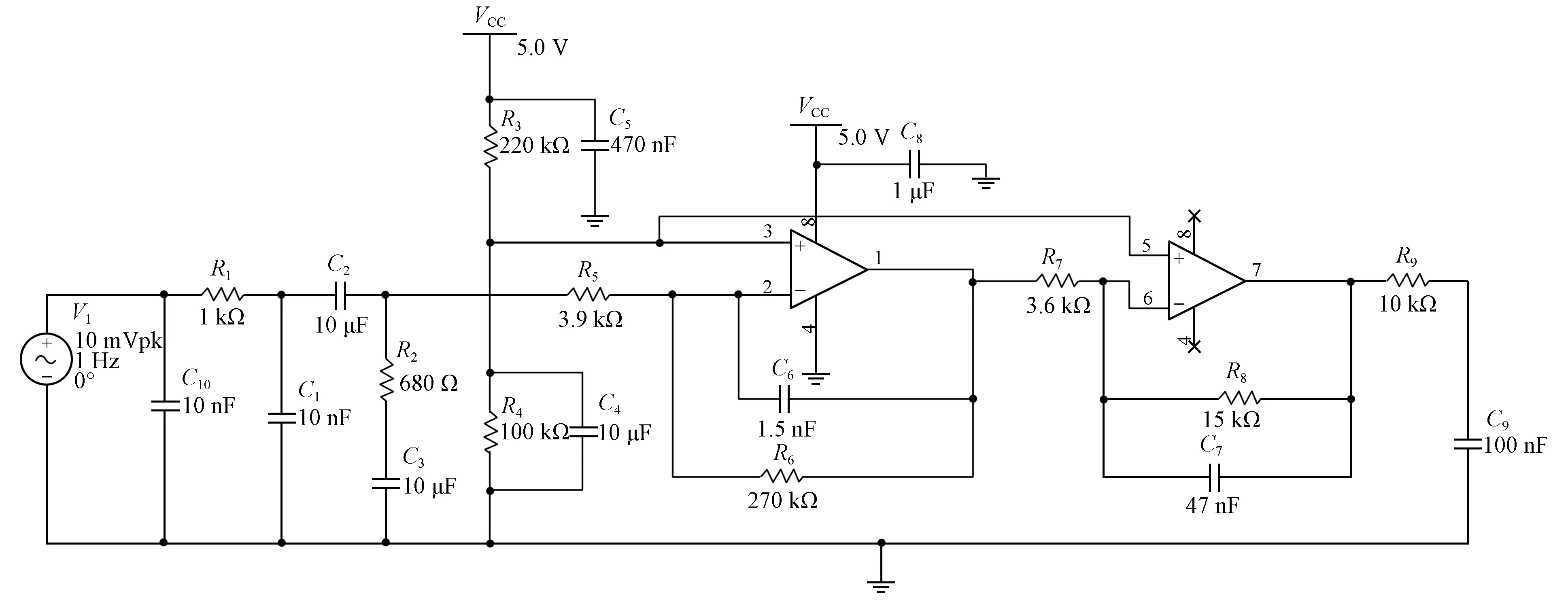
图8 移动信号检测电路Fig.8 Circuit of moving signal detection
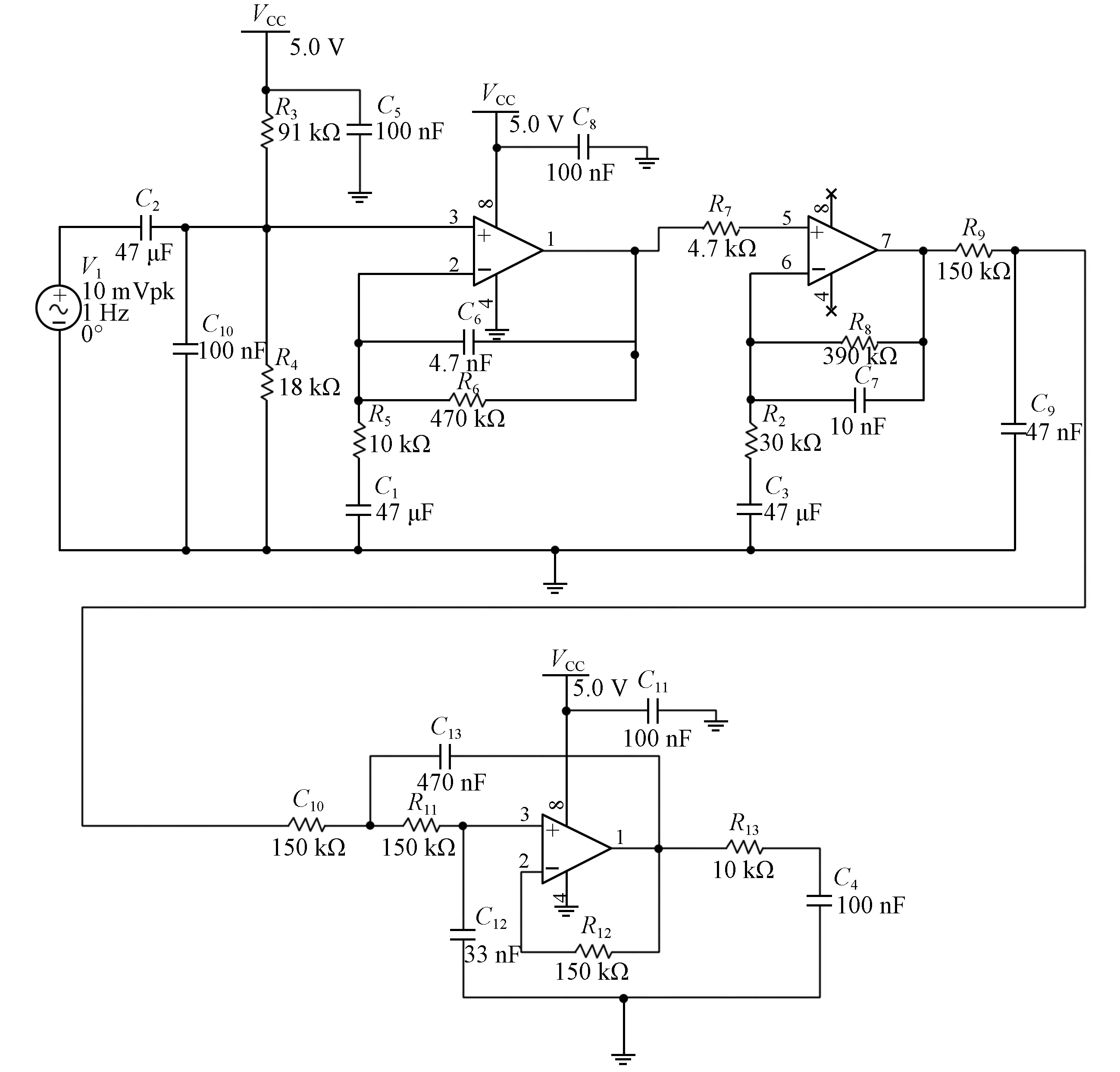
图9 微动信号检测电路Fig.9 Circuit of tiny action signal detection

图10 呼吸信号检测电路Fig.10 Circuit of respiratory signal detection
对人体信号检测电路进行扫频仿真分析后可以得知,各个电路通频带内的最大增益分别为57 dB,60 dB,80 dB。各个对应目标频段内的信号将会被很好的放大,目标频段之外的信号会大幅度衰减。
为了更好的验证信号整体电路性能,将各信号电路集成到一块电路板上并进行系统测试,实物如图11所示。

图11 集成测试Fig.11 Integration test
日常生活中人体活动的信号具有随机性,因此为了便于验证电路的功能,通过示波器观测各个检测电路的输出信号,并抓取完整度较好一个波形进行观察,结果如图12、图13、图14所示。
从图12、图13、图14可以得知:移动信号频率在32 Hz,微动信号频率在3 Hz,呼吸信号频率在300 mHz。由此可以得知最终输出的信号频率都落在了各自的频率范围内,而且信号的幅值也足够高,足以被单片机进行采样检测。
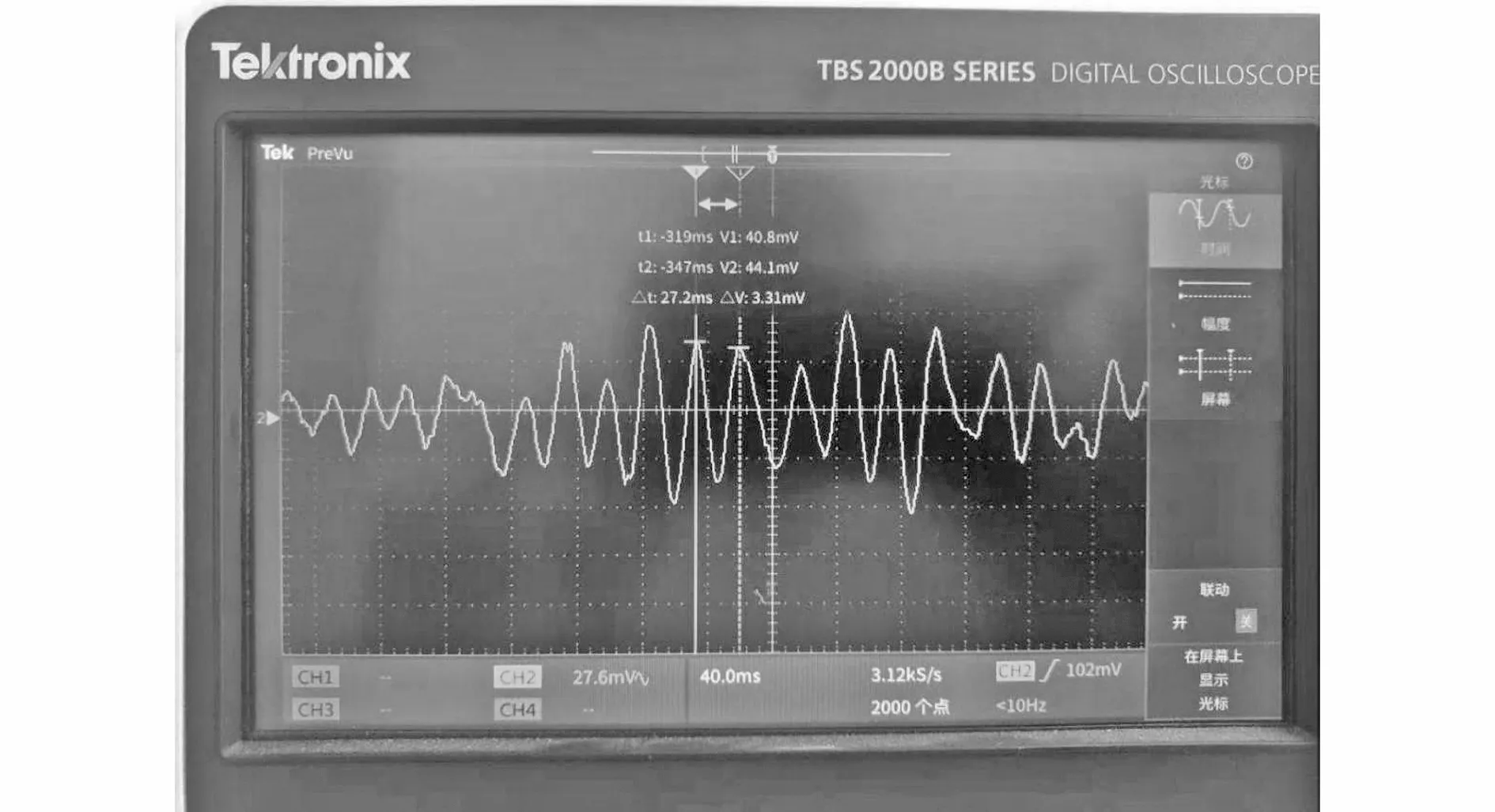
图12 移动信号输出波形Fig.12 Output waveform signal

图13 微动信号输出波形Fig.13 Output wareform signal
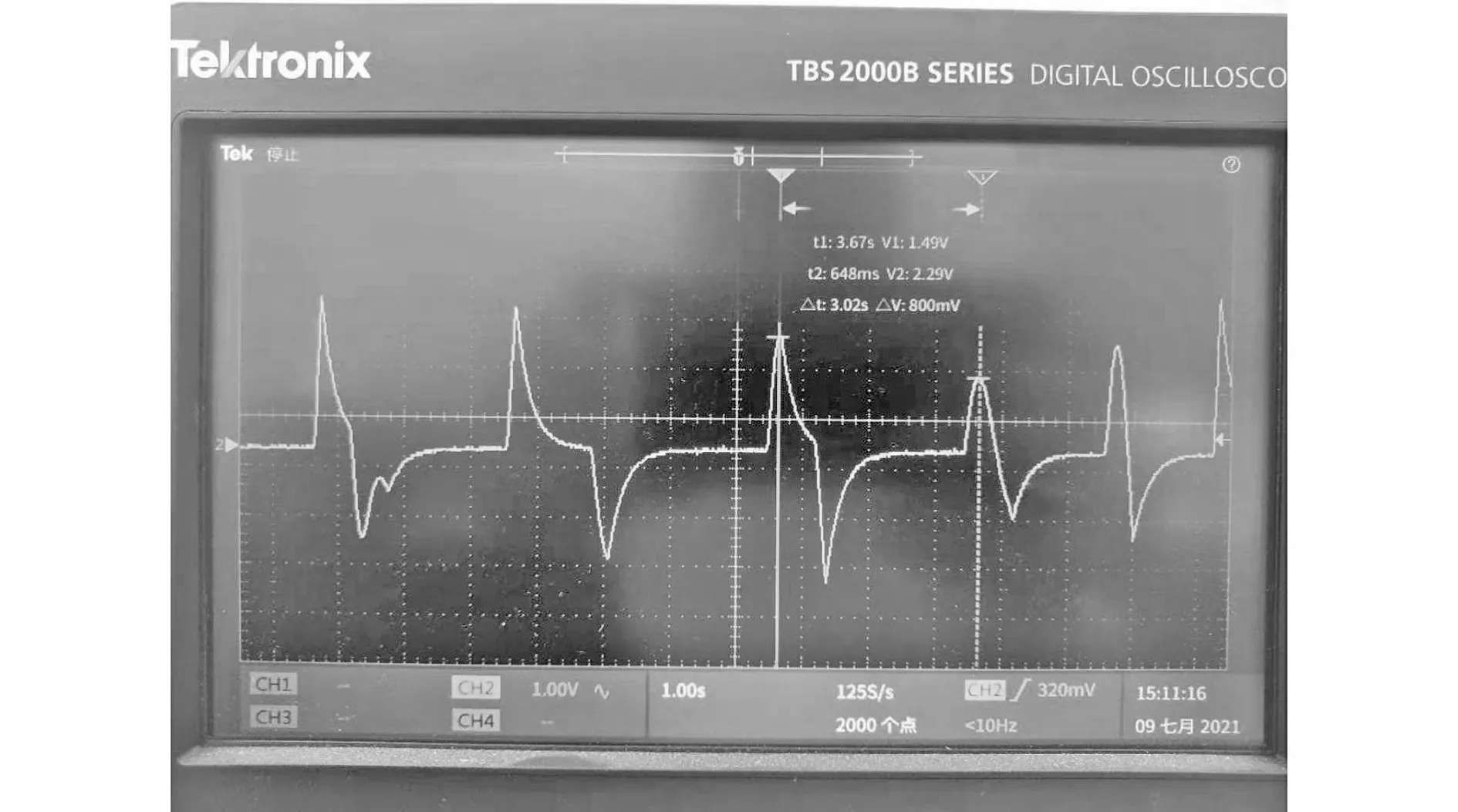
图14 呼吸信号输出波形Fig.14 Output waveform signal
需要说明的是,在运动后和保持静止两种不同的情况下,人体发出的信号会有很大的差别。本文设计的人体信号检测电路仅适用于日常生活中,没有剧烈运动前提下的人体信号检测。信号检测电路输出的人体信号通过软件进行简单的频率和幅值的识别,就可以实现基本的姿态检测功能。
4 姿态检测功能的逻辑实现
本文设计的多普勒微波雷达本质上是一个错时微波探测装置。在室内环境下,该错时微波探测装置能够发射在时间上保持错开的多束扇形探测波束,而且同一时刻仅有一个对应的辐射元工作,从而基于探测波束的方向性形成对相应区域的错时分区扫描探测,如图15所示。

图15 雷达探测波束Fig.15 Detection beam of radar
在进行基本人体姿态检测的应用中,微波雷达被安装在墙壁上,通过扇形波束天线实现对应探测空间的分层错时扫描。图15中的辐射天线1、2、3、4分别探测到区域1、2、3、4有人体信号(多普勒信号)时,此时能够确定人体在室内环境是站姿;若天线2、3、4分别探测到区域2、3、4存在人体信号,而天线1没有探测到区域1有人体信号时,能够确定人体在室内环境是坐姿;若天线3探测到区域3有人体信号、而其他天线在分别所对应的区域内没有探测到有人体信号时,能够确定人体在室内环境是躺姿。
进一步地,在确定人体在室内环境的姿态是躺姿后,微波感应器可以改变辐射天线3激励信号工作时的占空比,从而切换至呼吸探测模式探测人体的睡眠状态。例如人体是处于入睡状态、熟睡状态、睡醒状态,从而在后续控制室内环境的灯具、空调等电子设备的工作状态[11-12]。
5 结 论
本文将微波雷达技术与姿态检测相结合,设计了一款能检测基本人体姿态的室内微波雷达。微波雷达在工作频率为5.8 GHz的情况下,能检测出对应探测区域内人体的移动信号、微动信号和呼吸信号。可用于智能家居领域的行为预测和医学领域病人的心跳呼吸检测等方面。
整个设计包含微波天线、混频电路、信号检测电路等部分,结构简单,制造成本低廉,对推进智能家居建设,微波雷达应用场景多样化方面有一定的促进作用。为后续相关微波雷达产品的设计拓宽了思路,亦为其他相关电路的设计提供了一定的借鉴意义。
