基于FANUC 机器视觉的工件分拣应用研究
2022-06-07黄朝辉
黄朝辉
(柳州职业技术学院,广西 柳州 545006)
目前,机器视觉系统基本都是由工业相机、图形处理系统、执行图像处理结果的工控机或机器人等软硬件组成,分别由不同的供应商提供,软硬件都不是集成在一起,增加了系统的复杂性和操作难度。在轴承缺珠检测中,智能相机抓拍采集图像经过相机开发软件处理的数据读取到PLC 的内部寄存器,由PLC 控制达到分拣的目的[1]。工件在线检测中,工业摄像机采集的图像传送给计算机的图像分析软件进行处理和判断,机器人通过与计算机的连接通信实现对工件的抓取[2]。苹果采摘机器人系统中,双目视觉系统采集图像处理后通过工控机控制伺服驱动和末端执行器完成采摘任务[3]。机器视觉定位的自动贴膜机控制系统中,相机控制器与PLC 进行通信,贴膜机械手由PLC 控制完成动作[4]。
FANUC 作为世界上极少数在机器人系统中集成视觉功能的机器人供应商,大大降低了视觉系统的使用成本,可实现高柔性的机器人应用。全部工艺由机器人上的CPU 单元执行,因而不会产生通信延时的现象,也不需要再附加硬件[5]。
1 iRVision 视觉系统的硬件构成
iRVision 是FANUC 研发的即插即用视觉传感器系统。只要将工业相机和电缆连接到机器人的处理器上,就可以立即使用。为机器人提供视觉的系统完全是集成到机器人的控制器中[6]。
在一般情况下,iRVision 由如下设备构成:相机、镜头、相机电缆、照明装置、复用器(根据需要选配),如图1 所示。该系统硬件结构简单,安装连接方便,占用空间面积少。
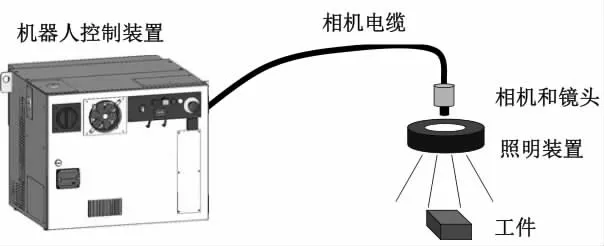
图1 iRVision 的典型设备构成图
根据工艺的需要选择FANUC M-10iA 机器人和FANUC R-30iB Mate 控制器,相机使用SONY XC-56 CCD 相机,如图2 所示。

图2 SO?NY XC-56 CCD 相机
2 iRVision 视觉系统的工作原理
iRVision 视觉系统用于补偿机器人的轨迹偏差,偏差值定位精准,确保机器人高品质完成作业,系统运行平稳,已处于国内外高水准行列[7]。
FANUC 机器人是示教重放方式的机器人,以相同的方式对放置在工作台上的工件进行作业,必须每次把工件放置在相同的位置。iRVision 视觉系统使用相机对工件的位置进行测量,对处于与示教机器人的程序时不同位置的工件,采用能以相同的方式进行作业的形态补正机器人的动作。
补正机器人就是利用传感器识别现在工件的实测位置与机器人程序示教时工件的基准位置之间的偏差量,并计算出进行机器人位置补正的补正量(或补偿数据)。
因此,在iRVision 上计算机器人补正量,假设使得补正用坐标系位移,这样就无需个别计算各点的补正量。如图3 所示,使得补正用坐标系移至处于实测位置的工件就好像处于基准位置那样的位置。通过补正坐标系本身,就无需针对每个示教点计算补正量,因而具有便于示教作业进行的优点。iRVision 将补正用坐标系的移动量作为补正量予以输出。机器人通过iRVision 获取偏移值后,就可以带着偏移值按照示教机器人时的移动指令完成对偏移放置位置的工件进行作业。
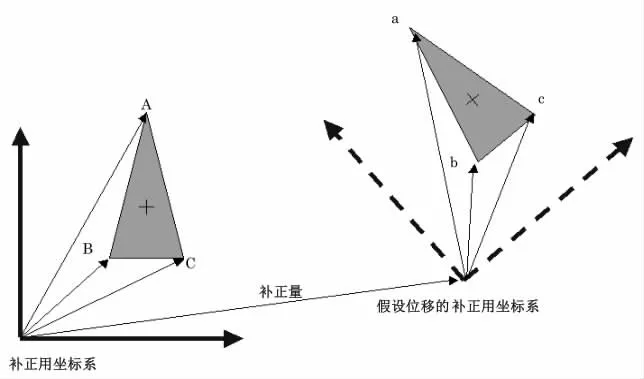
图3 补正用坐标系的位移图
3 iRVision 视觉系统的应用
iRVision 视觉系统直接在机器人设备上就可以完成全部设置,无需第三方软件对图像进行处理。
通过FANUC 机器人iRVision2 维补正技术可以实现机器人末端执行器的准确抓取,确保顺利实施下一道工序的任务,例如装配、码垛、定位、焊接、选件等。机器人末端执行器准确抓取不同位置工件的前提是确保iRVision 视觉系统的正确设置和程序创建。
iRVision 视觉系统有2D 和3D 的视觉应用,其中2维补正功能是这些应用的基础。2 维补正功能最典型的视觉应用方法是1 台相机的2 维补正,其他适用方法都需要应用1 台相机的2 维补正的启动步骤来启动。
1 台相机的2 维补正功能是利用1 台相机检出平面上任意位置的工件,对工件的平行移动(X,Y)以及X-Y 平面的旋转移动(R)方向进行补正的一种功能。iRVision 视觉系统的2 维补正的流程如图4 所示。

图4 iRVision 2 维补正的流程图
3.1 相机的标定
相机的标定采取通用的标定方法:点阵板标定。使用的工具叫点阵板夹具,在将点阵板夹具固定设置在工作台等进行标定时,通常使用比视野尺寸大一圈的点阵板夹具,点阵板标定的设置步骤如图5 所示。

图5 点阵板标定的流程图
点阵板标定具体的流程为:大多数情况下选择0号用户坐标作为设定相机标定的基准坐标系的初始值。在iRVision 上进行相机数据中相机的种类、相机的设置方法等设定。在执行相机的标定之前调整镜头的光圈和焦点。在设定点阵板夹具的设置信息时,使用正确进行了TCP 设置的触针触碰的方法在用户坐标系中设定设置信息。该TCP 设置的精度会影响到机器人搬运工件的精度。在图6 点阵板标定的设定画面中,正确选择基准坐标系和点阵板夹具设置信息设定的坐标系编号。最后确认所创建标定数据的内容和标定点,若没有问题,则标定结束。
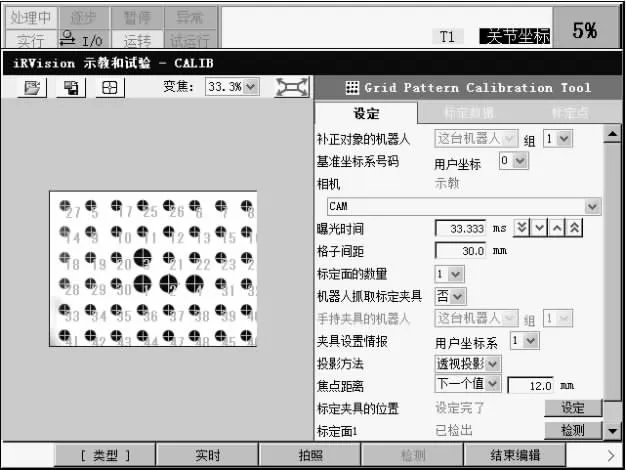
图6 点阵板标定的示教画面
3.2 补正用坐标系的设定
在用户坐标系上以使得补正用坐标系的XY 平面与放置有工件的面的平行方式来设定补正用坐标系。本例中补正用坐标系已被设定在1 号用户坐标系中。补正用坐标系通过使用触针碰触进行设定。如图7 所示,在传送带上设定补正用坐标系。

图7 补正用坐标系示意图
3.3 视觉处理程序的创建和示教
一台相机检测工件的2 维位置而进行机器人补正的视觉程序的流程如图8 所示。程序示教时打开[2-D Single-View Vision Process]编辑画面完成各项信息的设置。按下F4 检测而进行实验,确认是否按照期望的方式动作。根据设定的基准位置和检测位置的相对关系计算补正量,同时在设定基准位置时的工件位置进行机器人的位置示教。最后完成指定视觉参数。

图8 视觉程序的流程图
3.4 机器人程序的创建和示教
根据任务系统的工作流程,机器人的程序主要包含以下几个方面:设定坐标系、视觉执行、视觉检测、条件判断并跳转、计算存储补偿数据、机器人视觉补正完成作业动作。视觉图像数据处理程序和机器人程序结合在一起,大大减少了程序量,而且不需要进行程序间的处理和转换。机器人的关键程序如下。

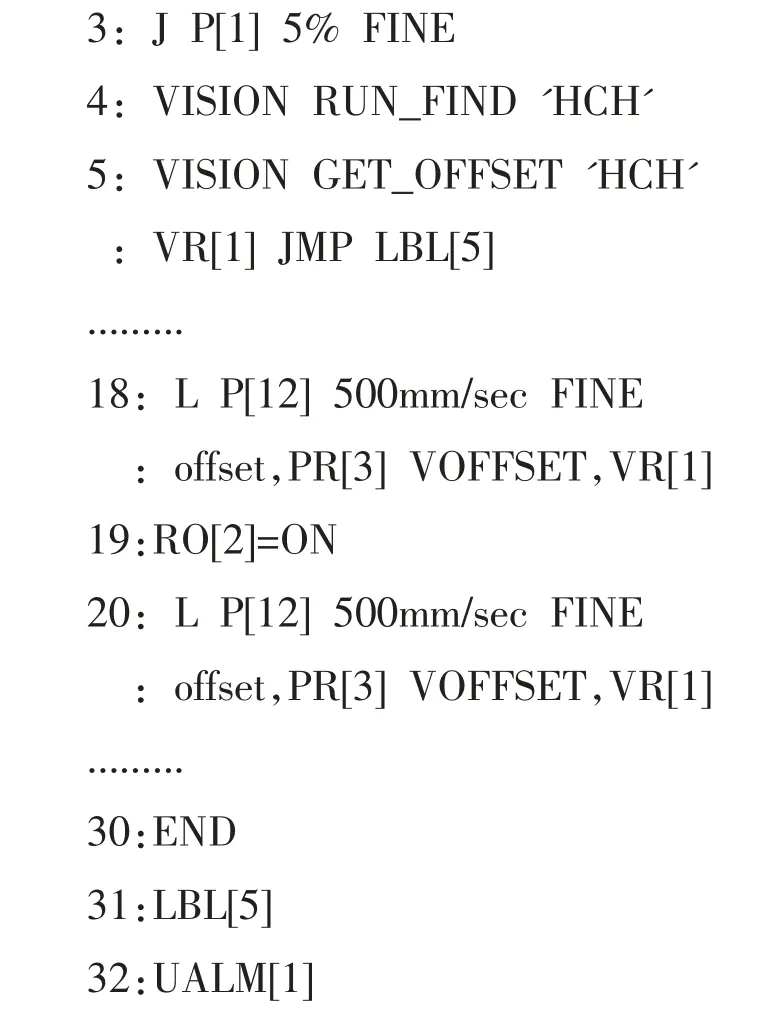
机器人的工作流程如图9 所示。传送带传送工件到位后并停止,机器人设定用户和工具坐标系,移动到示教机器人的初始位置。调用视觉程序并发出拍照信号检测在线工件,若判断拍照后的视图与模型示教视图比对成功后,计算补偿数据并获取偏移值存储到视觉寄存器中,机器人带视觉补正完成对传送线工件的作业动作。若拍照比对失败后,程序跳转至标签行执行视觉错误报警。

图9 机器人程序流程图
4 结论
通过对FANUC 机器人iRVision 视觉系统的应用研究,iRVision 视觉系统不需要额外的硬件和第三方视觉图像数据处理软件就可以实现高柔性的机器人应用,使用方便,集成度高,大大降低了视觉系统的使用成本,提高了机器人的工作效率、质量和可靠性,同时也减轻了设备维护的工作量。
