基于五端MMC-MTDC 系统的协调启动和故障恢复启动控制策略
2022-06-07立梓辰赵博文张延迟
张 倩 ,立梓辰 ,赵博文 ,张延迟
(1.国网江苏省电力有限公司溧阳市供电分公司,江苏省 溧阳市 213300;2.国网江苏省电力有限公司宿迁供电分公司,江苏省 宿迁市 223600;3.国网上海市电力公司,上海市 浦东新区 200120;4.上海电机学院电气学院,上海市 浦东新区 200120)
0 引言
在当前大规模电网互联的需求下,传统的点对点的直流输电方式已经不能满足需要,大规模多点互联的多电源供电和多受点受电的多端直流输电系统(multi-terminal direct current,MTDC)已经成为目前的发展趋势[1-4]。而模块化多电平换流器(modular multilevel converter,MMC)的开关损耗更低,输出的电能质量更好等优势,逐渐在多端柔性直流输电中得到应用[5-8]。
目前对于MTDC已有较多的研究成果[5-8]。这些研究从拓扑结构、控制策略和故障识别等几个方面进行了有益的探讨。文献[9]介绍了多端直流网络的实际拓扑结构,建立能提高系统灵活性的拓扑结构仿真功能模型,且增大线路的利用率。文献[10]提出了一种混合型的拓扑结构,并伴随故障清除功能。文献[11-12]根据多端直流系统各站的时序配合,设计了预充电识别方法,提出了多端直流系统的协调启动控制策略。文献[13-14]介绍了混合式MMC 的高压直流输电系统的启动过程,并提出了基于混合式MMC直流输电系统的有效控制策略。文献[15]分析了系统换流站的启动对交流电网的影响。文献[16-17]介绍了双馈感应发电机组接入直流系统的MMC-MTDC系统的启动过程。文献[18]从南方电网工程实际介绍柔性直流输电在黑启动方面的优势。文献[19]提出一种可适用于不同直流拓扑形式和交直流连接方式的MMC-MTDC系统的潮流算法。文献[20]为了提高MTDC系统稳定性,将矢量控制和功率同步控制并存于同一个换流站,提出了一种同步切换控制策略。文献[21]通过计算线路两端差流的短时能量来区分故障线路和非故障线路,专门应对MTDC 系统的故障识别;文献[22]在下垂控制策略中使用直流电抗器两端的电压的线性组合作为输入,提高了电压源型换流器(voltage source converter,VSC)-MTDC 系统的稳定性。以上研究虽然提升了MTDC 系统的稳定性和故障识别能力,但是对多端系统多换流站的协调启动过程的研究尚且不足。
而MMC相对于VSC具有开关损耗低、故障穿越能力强的优点,成为当前多端柔性直流输电发展的主流方向,研究主要从3个方面进行[19-22]。文献[23]针对传统MMC 排序均压策略计算量大、开关频率高的问题,提出一种划分子模块投入优先级的新型均压策略;文献[24]研究MMC-MTDC 系统的保护死区,提出了一种新型线路保护方法;文献[25]建立考虑交流侧和直流侧的双同步旋转参考系中下垂控制单端MMC 的线性时不变系统 (linear time invariant,LTI)模型,研究MMC-MTDC 系统的直流电压动态特性,提出一种新的能量管理方法来提升虚拟电容控制性能。文献[26]为了减少子模块开关次数,提出一种根据上一时刻子模块投切状态进行电压排序的优化算法。以上的研究虽然对于提高MMC的输出波形质量以及响应速度和减少开关损耗进行了有效的改进,但由于MMC 系统自身包含大量的电容,这就需要一个合理的启动过程,减少系统启动暂态过程的能量冲击,这方面的研究较少。
本文主要解决以下的问题:(1)将MMC-MTDC系统协调启动和故障重启性能进行综合分析,基于其预充电电容充电情况的分析结果,提出一种新型协调启动的控制策略,用于解决传统预充电方式存在“先发优势”的问题。(2)分析几种MMC-MTDC系统典型的故障重启问题,为了提高系统的稳定性和重启速度,提出一种新型的故障恢复快速启动控制策略。
1 MMC-MTDC 换流站级系统控制原理
MMC-MTDC换流站级控制器是基于MMC系统建立的交流电网平衡的控制器,MMC-MTDC 换流站级系统的整体控制如图1所示。图中:Rac为系统交流侧电阻;Lac为交流侧电感;UA、UB、UC和iA、iB、iC分别为三相电压和电流;Udc是直流侧电压;us为系统交流侧电压;usd、usq、isd、isq是系统交流侧电压和电流在d 轴和q 轴上的分量;Ps和Qs是系统有功功率和无功功率;Udcref、usref、Psref、Qsref分别为直流侧电压参考值、交流侧电压参考值、有功功率参考值和无功功率参考值。
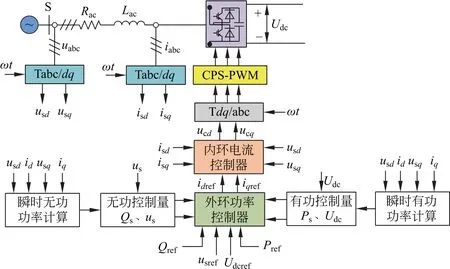
图1 MMC-MTDC换流站控制框图Fig.1 Control block diagram of MMC-MTDC converter station
在dq 坐标系下,系统的控制可以分为内环电流控制和外环功率控制。其中内环电流控制调节变量,使dq 轴电流可以有效跟踪参考值idref、iqref,并在一定程度上抑制相间环流。外环功率控制计算内环电流控制所需的dq 轴电流参考值。
MMC-MTDC系统主要在主从控制方式下稳定运行,将多端直流网络中的各个换流站划分为主换流站和从换流站,分别采用不同的控制方法协调控制,多端直流网络结构如图2所示。
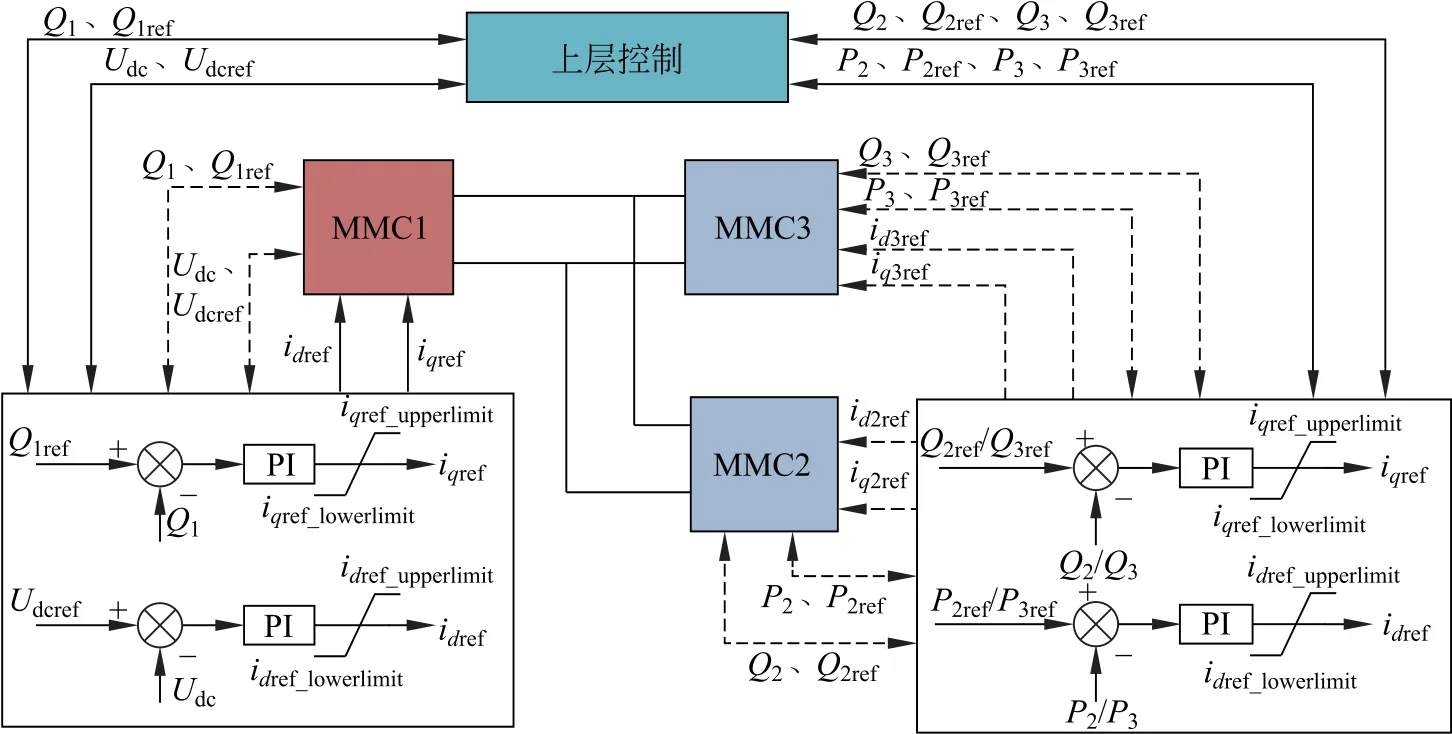
图2 MMC-MTDC系统主从控制框图Fig.2 Control block diagram of master-slave controller for MMC-MTDC system
本文的主换流站采用定直流电压控制整个系统的直流电压,从换流站通过控制额定功率有功功率,从而实现MMC-MTDC系统主从换流站的协调控制。主换流站可以维持整个MMC-MTDC 系统直流电压的稳定,但主换流站和从换流站的控制方法不同,因此相应的控制器的参考值也不同。换流站将有功量与无功量传送至上层控制系统,最终找到稳定运行的点。
2 MMC-MTDC 系统协调启动控制方法
2.1 MMC 预充电方式
MMC-MTDC系统预充电方式根据是否使用辅助充电电源分为他励预充电和自励预充电。MMC他励预充电需要辅助直流电源,使MMC 子模块电容充电至设定的电压值[27-28]。而自励预充电即为交流系统对MMC系统三相桥臂子模块电容进行充电到目标值。自励充电方式无需使用辅助直流电源,直流输电工程大部分采用自励充电方式,本文亦使用此种方法。
自励预充电方式易受到交流系统三相电压过零点的影响,由于A、B、C 三相电压存在相位差,在选择顺序充电时,先充电的桥臂子模块电容可以充到目标值,但后充电的子模块电容却达不到目标值。针对此种问题,本文对MMC 预充电具体工作状态进行分析。
三相MMC自励预充电拓扑结构如图3(a)所示,MMC系统自励预充电主要分为2个过程,不可控预充电阶段和可控预充电2个阶段[29-30],其中不可控充电阶段的所有子模块的触发信号均关闭,交流系统的线电压要分配到每个子模块电容上,由此可得单个子模块的电容电压:

式中:N 为单个桥臂子模块数;uc_sm为子模块电容电压;Uph为交流系统相电压。
三相MMC系统不可控预充电原理如图3(b)所示,当桥臂电流为正,子模块处于充电状态,等效为电容Csm;当桥臂电流为负,子模块处于旁路状态,等效为短路。不可控预充电方式只能将电容充电至70%,剩余部分需要可控预充电阶段完成MMC系统的充电要求。
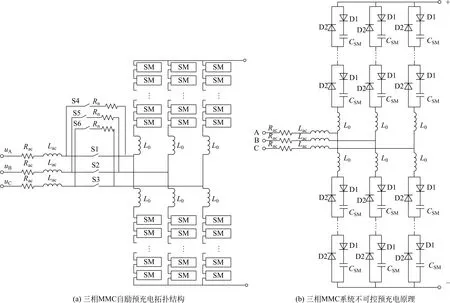
图3 三相MMC预充电原理图Fig.3 Schematic diagram of three-phase MMC pre-charging
由三相交流系统电压,可得MMC 自励充电系统的子模块投入时间区间,
式中:A 为交流系统电压幅值;ω 为角速度。
由式(2)可得单个周期内t1—t6的分点为:t1=0.001 667+Δt;t2=0.008 333+Δt;t3=0.011 667+Δt;t4=0.018 333+Δt;t5=0.021 667+Δt;t2=0.028 333+Δt;Δt=m T。Δt 表示为偏 移的周期量,m 为偏移的周期数,T 表示交流系统的周期。
不可控充电开关导通如表1所示,不可控预充电电流流向如图4所示。由图4可以看出MMC系统各相桥臂电流的流向及各桥臂子模块的充电状态,进而对每个相单元的桥臂选择合适的导通区间,即根据三相桥臂6种充电情况选定每个桥臂子模块的投入时间,从而完成MMC-MTDC 系统子模块电容的自励预充电。
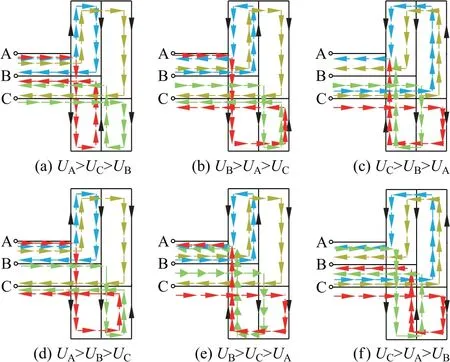
图4 三相桥臂6种充电电流流向图Fig.4 Schematic diagram of six charging conditions of three-phase bridge arm
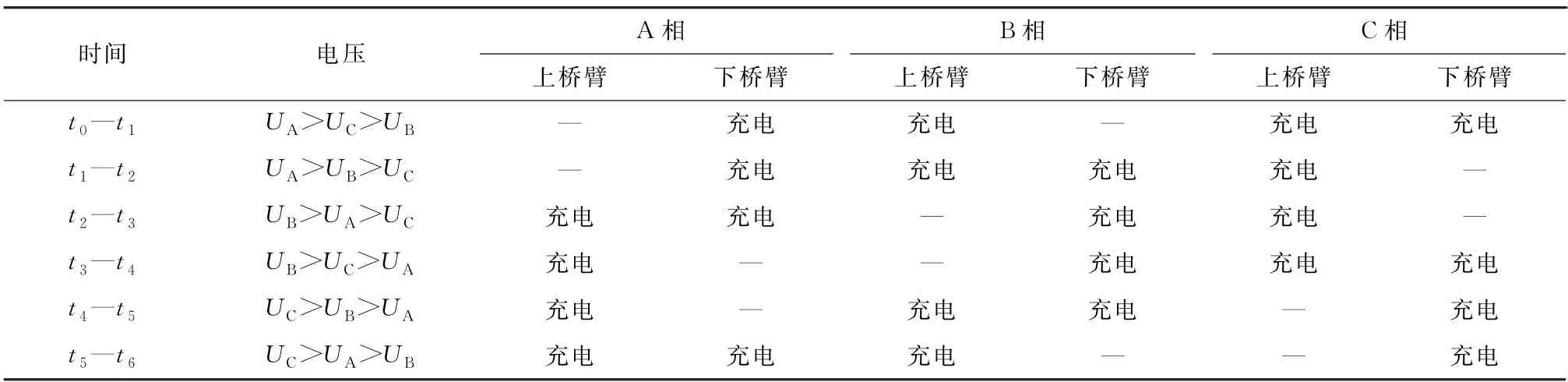
表1 不可控充电阶段三相导通情况Table 1 Three-phase conduction in uncontrollable charging stage
MMC自励预充电虽然可以完成预充电的目标,但充电效果不同以及部分电流较大的问题,且多端MMC-MTDC 系统的启动不合理会带来较大的暂态能量冲击。
2.2 新型MMC-MTDC 协调启动控制方法
针对前文提到的预充电“先发优势”的问题,根据MMC 换流站的具体充电情况及控制方式,本文提出一种新的MMC-MTDC系统的预充电和协调启动控制策略,MMC换流站级控制器可以在MMC系统完成不可控预充电后控制MMC系统的暂态充电过程,协调完成多个MMC从换流站的预充电,完成整个MMC-MTDC系统的预充电与启动,具体控制流程如图5所示。
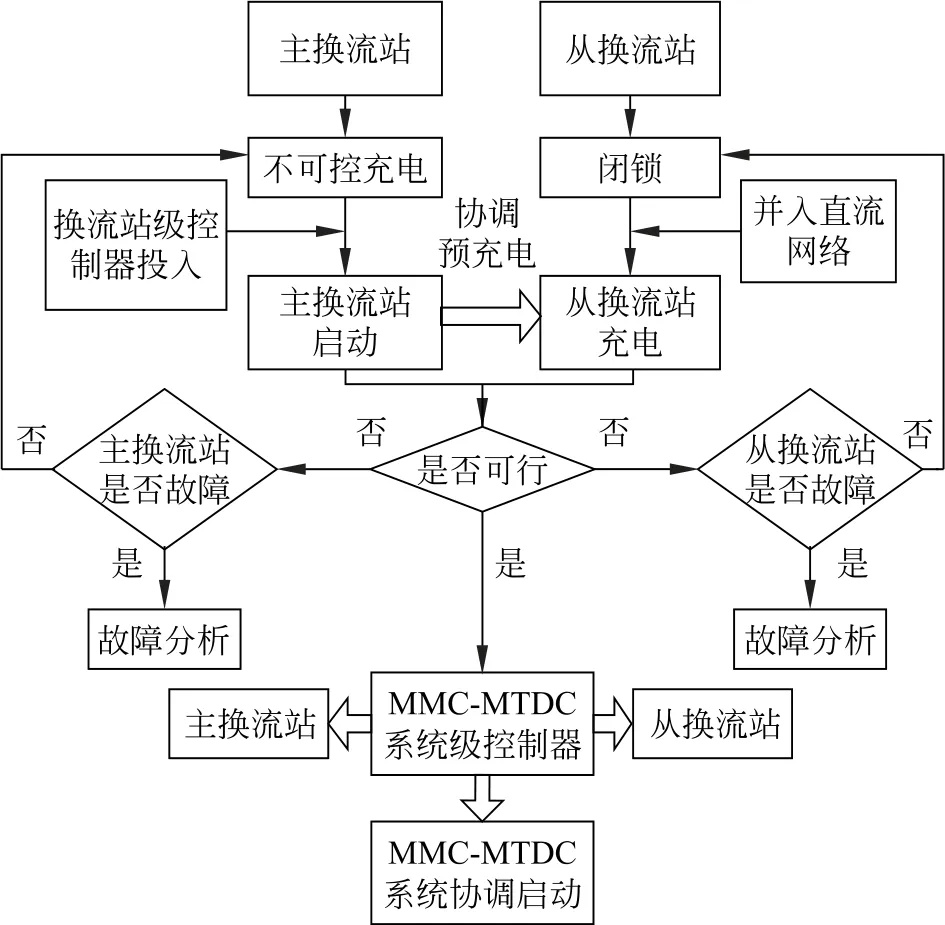
图5 MMC-MTDC系统协调启动流程图Fig.5 Flow chart of coordinated start of MMC-MTDC system
(1) 选定MMC-MTDC 系统单端MMC1有源换流站对MMC 系统进行独立不可控预充电,使其子模块达到预充电的目标值70%,对MMC1 换流站进行定直流电压和定无功功率的启动控制,完成MMC1换流站的启动和子模块电容充电。
(2) 在单端MMC1 换流站启动的同时,其他MMC换流站并入直流母线。MMC1换流站启动过程会产生较大的电压波动,产生的能量冲击会给其他MMC从换流站充电,提前实现预充电。
协调预充电可行性由MMC子模块电压可行区间上下限确定,即

(3)MMC-MTDC 系统的MMC1 换流站启动完成,其余MMC 从换流站的子模块充电至uvalid/2N 后,对MMC 从换流站进行定有功功率和定无功功率的启动控制,从而实现整个MMC-MTDC 系统的预充电和启动。
2.3 新型故障恢复启动控制方法
在MMC-MTDC系统的启动过程中会产生多种故障,故障出现后经过短暂时间可以恢复的故障为暂时性故障,暂时故障后恢复启动过程一般较为缓慢或者直接进入停机放电,而重新启动会浪费能量且延长了启动时间,降低系统工作效率。
本文针对几种典型的故障进行分析,由于故障对控制系统中的相关控制量影响不同,如直流侧线路短路故障会造成直流侧电压为0,交流系统故障会影响无功控制量,需要对相关量控制器进行调整。由于控制器中含有多个比例积分(proportional integral,PI)控制器,每个控制器都有不同的参数以及限值,对再启动有较高的要求。本文设定控制器的输出值为:

式中:y 为控制器输出量;Δx 为实际值与参考值的差值;kP和kI为PI控制中的比例和积分系数。则有:
式中:Δid1、Δiq1为MMC1 换 流 站dq 轴 电 流 变 化量;ΔUdc、ΔQ1为MMC1换流站的直流电压和无功功率变化量;Δucd1、Δucq1为控制器输出控制量的变化量;kP1、kI1、kP2、kI2、kP3、kI3、kP4、kI4为MMC 主换流站控制器对应的比例和积分参数。
由式(5)(6)可知,系统故障对控制量影响较大,实际运行中,控制器输出量会在限值范围内稳定在一个数值。故障恢复启动流程如图6所示,根据控制器输出值变化情况以及输出值超出限定值的时间长短来判定系统重启能力,从而调整控制器输出参数。
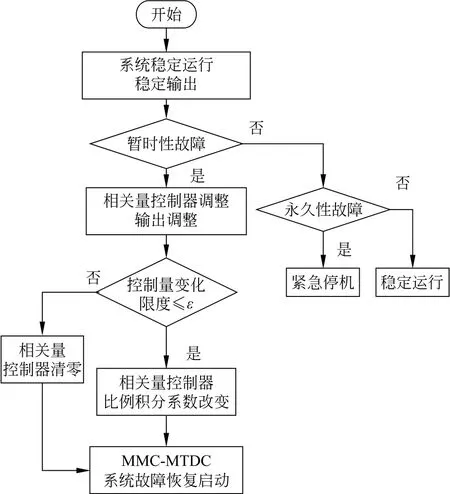
图6 MMC-MTDC系统故障恢复启动流程图Fig.6 Flow chart of failure recovery startup of MMC-MTDC system
2.3.1 直流侧短路故障
直流侧线路故障中最为严重的是直流侧线路的正负极线路短路故障,如图6所示,由于直流侧线路正负极短路造成直流线路快速放电,直流侧电压迅速降为0,PI控制器的Δx 值迅速增大,超过控制器限值。
ΔUdc的快速变化引起Δid、Δucd的变化,设调节后定直流电压控制的比例和积分参数为kPa、kIa,将原有比例积分参数kP1、kI1改为kPa、kIa,可得:
式中:Δida、Δucda为定直流电压控制器参数调节后,控制量输出的变化量。
实际定直流电压控制器的变化量设为Δidk、Δucdk,表达式为:

由此可得,控制调节控制器恢复到原有的上下限范围即可实现快速恢复启动。
2.3.2 交流系统故障
交流系统故障会导致启动失败,MMC-MTDC系统不稳定,严重甚至会导致整个系统崩溃。交流系统故障分为两相短路故障、三相短路故障和三相短路故障三种故障。
(1) 两相短路故障
(2) 三相短路故障

(3) 单相接地故障

式中:UfA、UfB、UfC为故障时交流系统的三相电压;ifA、ifB、ifC为故障时交流系统的三相电流。
由式(9)—(11)可知,交流系统发生故障对电流、电压均有影响,三相电压的变化对经过park变化后的dq 轴电压产生影响,三相电流的变化对dq轴电流变化产生影响。故障后的dq 轴的变化量为
式中:ucdv、ucqv为控制器故障后的控制量;usdv、idv、iqv为故障后的d 轴电压、d 轴电流以及q 轴电流。
由于交流系统发生故障会对控制量ucd、ucq产生影响,同时系统控制器的调节量及调节参数不同,针对交流系统故障的快速恢复,需要考虑每个对应控制器的控制量超过限值的情况,可以采取控制器清零或部分控制器参数调节,从而加快系统故障恢复启动的能力。
3 仿真与实验
3.1 MMC-MTDC 系统协调启动仿真验证
本文建立了如图7所示的五端MMC-MTDC系统协调预充电与启动仿真模型,模型参数如表2—3所示。
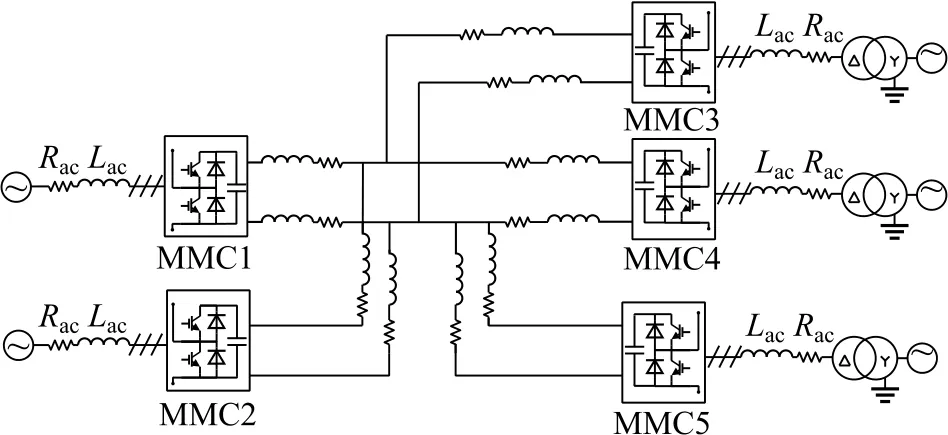
图7 五端MMC-MTDC系统协调预充电与启动仿真模型结构图Fig.7 Simulation model structure diagram of coordinated pre-charge and start of five-terminal MMC-MTDC system
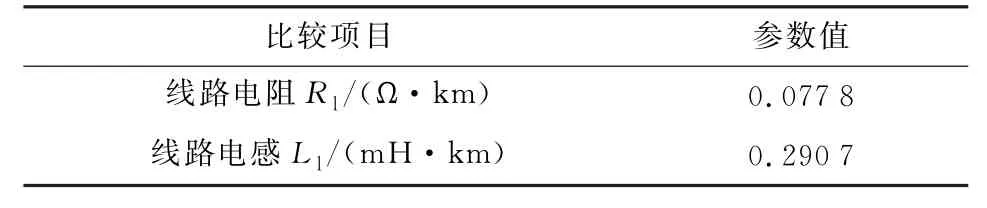
表2 五端MMC-MTDC系统线路参数Table 2 Line parameters of five-terminal MMC-MTDC system
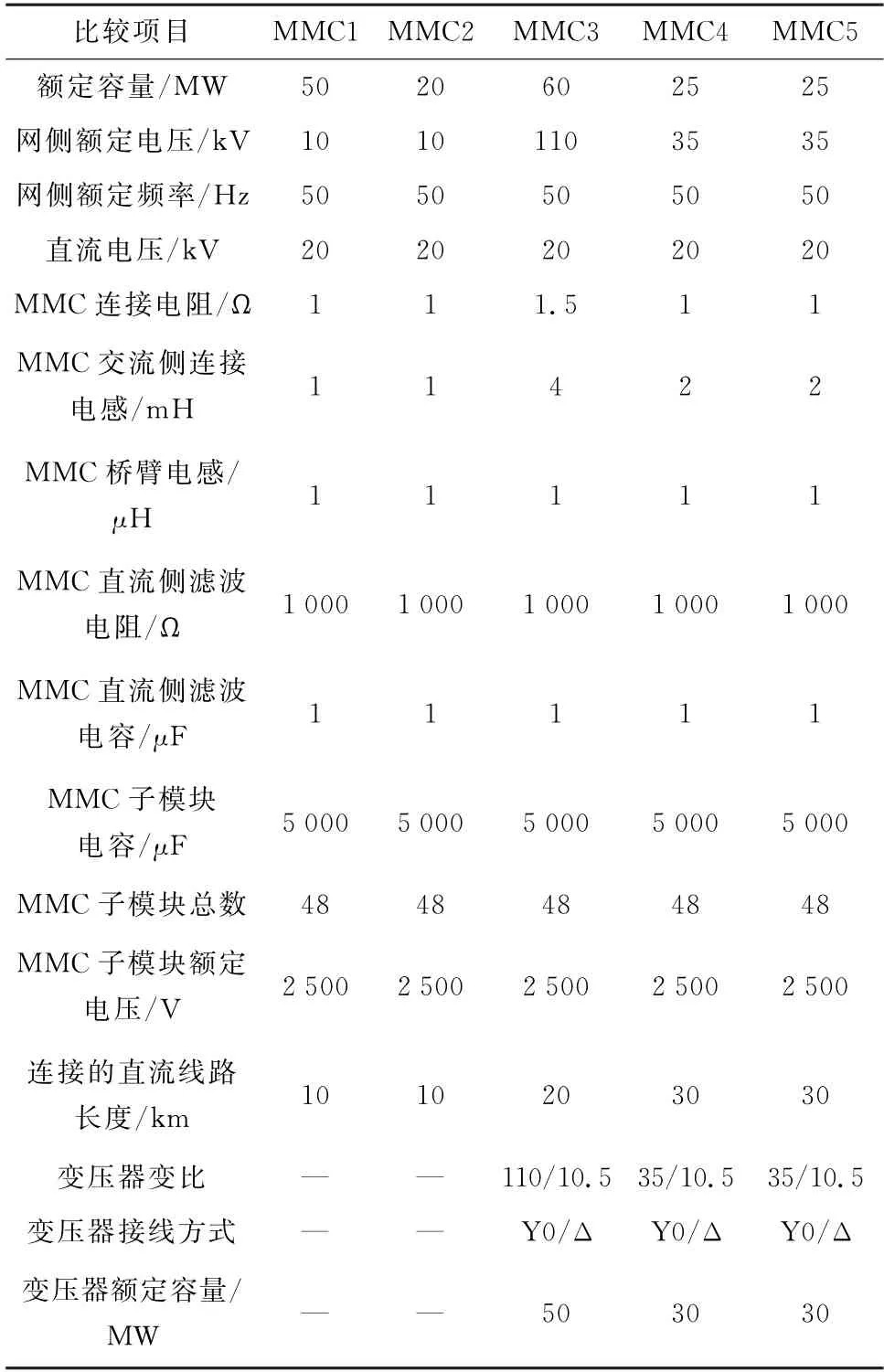
表3 五端MMC-MTDC系统协调预充电与启动仿真模型参数Table 3 Simulation model parameters of coordinated pre-charge and start of five-terminal MMC-MTDC system
在仿真参数设置下,选定MMC1换流站作为主换流站,设定MMC1的直流电压指令值Udcref为20 kV,无功功率的指令值Q1ref为0,在0~1s内进行启动,控制五端MMC-MTDC 系统的直流侧电压稳定在20 kV。MMC2、MMC3、MMC4、MMC5换流站分别在1.5、2.5、3.5、4.5 s时刻并入直流网络,如图8—9所示,这种协调启动的方式对MMC-MTDC 系统的直流侧电压的波动影响较小进而对系统的能量冲击最小,在换流站并入直流网络后,直流侧电压0.3 s就稳定在20 kV,保证了系统电压的稳定。
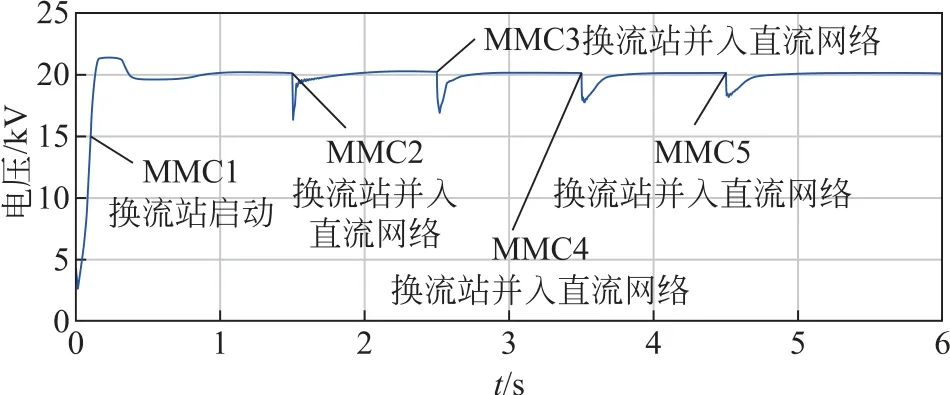
图8 五端MMC-MTDC系统直流侧电压Fig.8 DC side voltage of five-terminal MMC-MTDC system
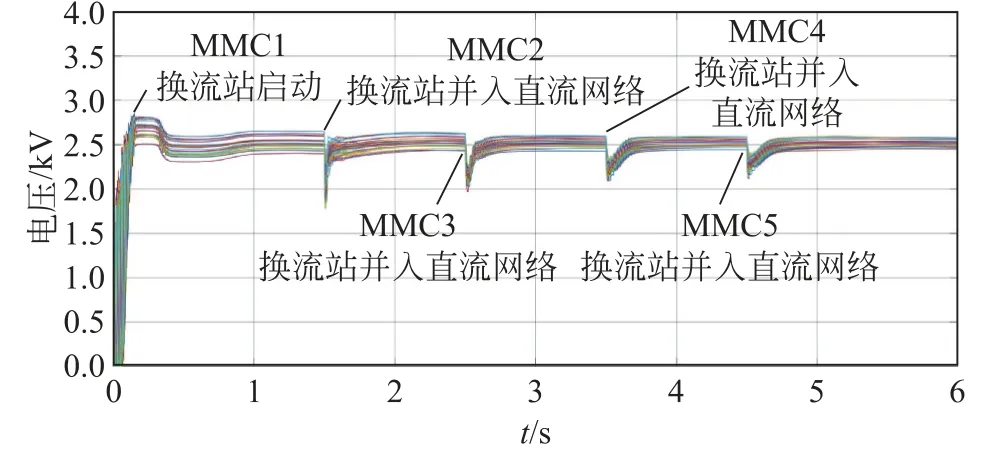
图9 MMC1主换流站的子模块电容电压Fig.9 Submodule capacitor voltage of MMC1 master converter station
3.2 故障重新启动的仿真
3.2.1 直流侧正负极短路故障
MMC-MTDC 系统稳定运行时,在t=4.5 s发生直流侧正负极短路故障,故障持续0.02 s,MMC主换流站在发生故障后进入闭锁状态并维持0.05 s,进而保护换流站的子模块和等待直流侧正负极短路故障消除。故障发生后,从换流站与主换流站断开,待直流侧正负极性故障解除,主换流站重新控制直流电压再并入从换流站,同时调节相应的定直流电压控制器参数kPa和kIa,即可实现故障的快速恢复,仿真结果如图10所示。
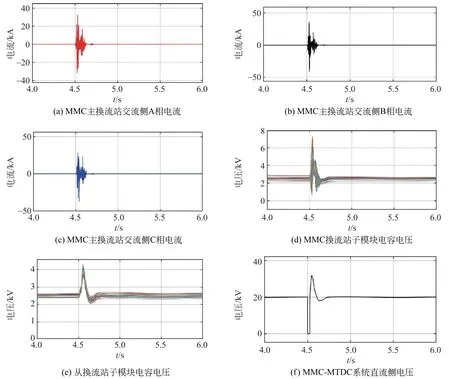
图10 MMC-MTDC系统直流侧正负极短路故障恢复仿真Fig.10 MMC-MTDC system DC side positive and negative short-circuit fault recovery simulation
3.2.2 单相短路故障
如图11所示,MMC-MTDC系统在交流系统C相单相接地故障的情况下,MMC 主换流站交流侧的C相电流远大于A 相和B 相的电流。故障消除后,相应调节定直流电压控制器kPa=2kP1、kIa=6kI1后,三相电流逐渐恢复,MMC-MTDC系统直流侧电压也在经过0.25 s时间逐渐恢复稳定。
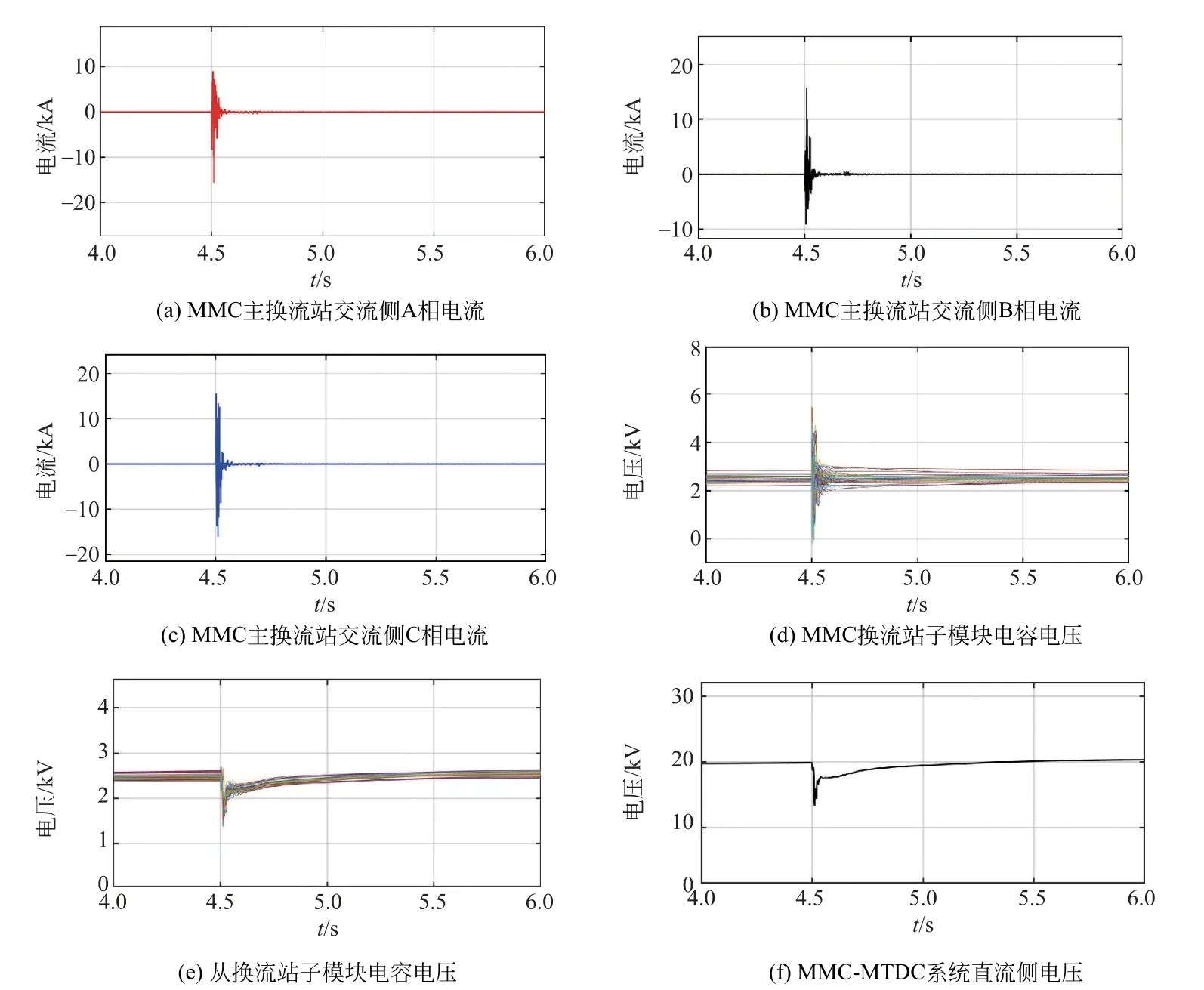
图11 MMC-MTDC系统单相故障恢复启动仿真Fig.11 Simulation of MMC-MTDC single-phase fault recovery startup
3.2.3 两相短路故障
五端MMC-MTDC系统在B、C 两相短路故障的情况下,MMC主换流站交流测的B 相和C 相电路远远大于A 相的电流。故障消除后,相应调订直流电压控制器kPa=6kP1、kIa=4kI1后,三相电流逐渐恢复,MMC-MTDC系统直流侧电压也在警告过0.46 s时间逐渐恢复稳定,如图12所示。
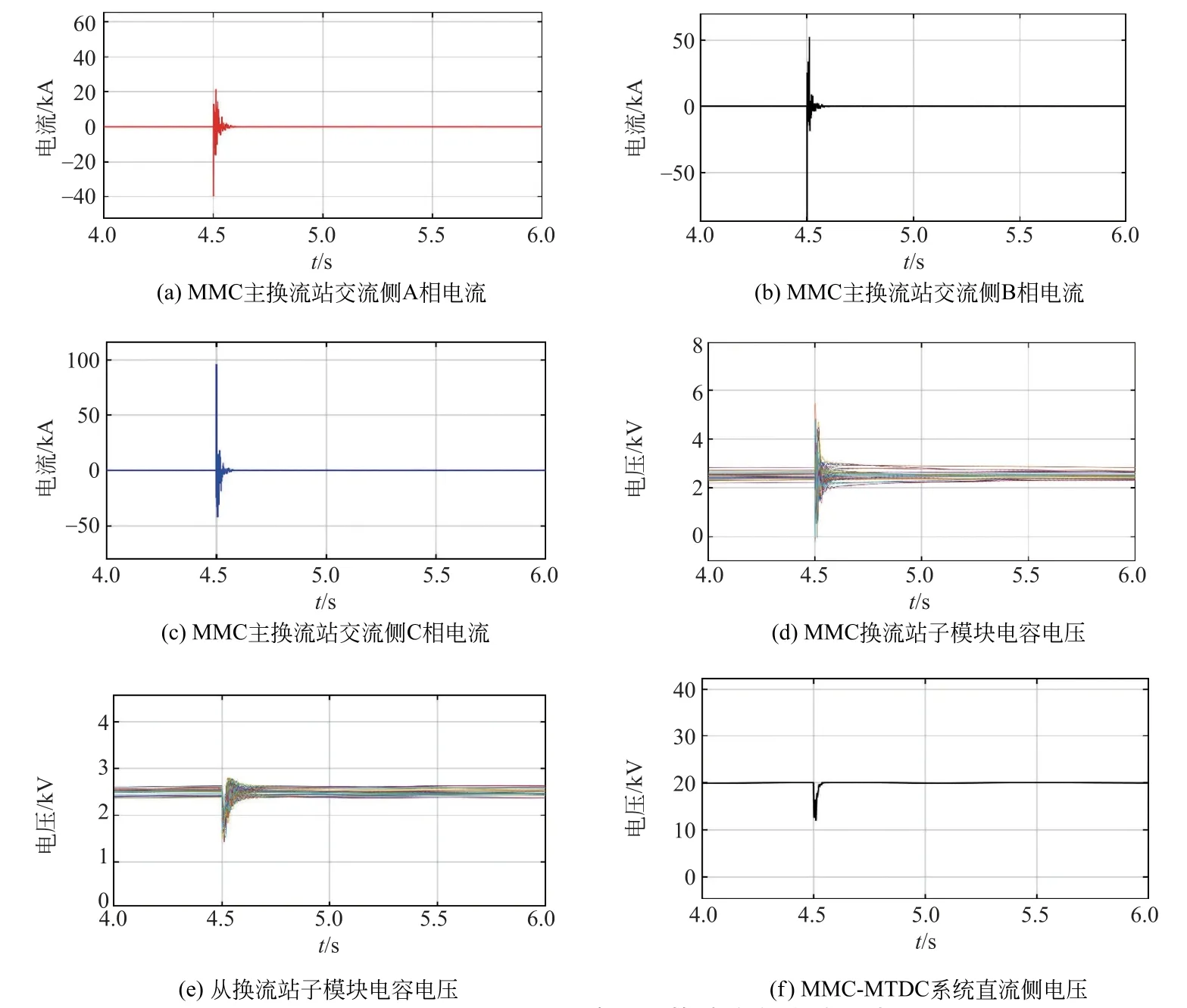
图12 MMC-MTDC系统两相故障恢复启动仿真Fig.12 Simulation of MMC-MTDC two-phase fault recovery startup
3.2.4 三相短路故障
如图13所示,MMC-MTDC系统在交流系统三相短路故障的情况下,MMC 主换流站交流侧的三相电流同时瞬间增大。故障消除后,相应调节定直流电压控制器kPa=5kP1、kIa=5kI1三相电流逐渐恢复,MMC-MTDC系统直流侧电压也在经过0.66 s时间逐渐恢复稳定。
图13 MMC-MTDC系统三相故障恢复启动仿真Fig.13 Simulation of MMC-MTDC three-phase fault recovery startup
由图11—13可知,三种交流系统故障情况下,子模块电容电压在故障发生后,电压受到了波动,但控制器参数调节的情况下,三种交流系统故障的子模块电容电压在故障解除后,快速恢复稳定运行状态。
4 结论
(1) 本文建立了基于五端MMC-MTDC 系统新型协调启动模型,此种模型可以在0.3 s内稳定在目标电压水平,电压波动也在3 kV 以内。
(2) 本文提出的新型协调启动控制可以满足不同故障发生后系统的恢复启动,并且恢复时间都在1 s以内,实验的结果证明了本文的结论。