多波束宽带探鱼仪发射波束形成的现场可编程门阵列(FPGA)实现
2022-06-06李国栋王志俊汤涛林
魏 珂,李国栋,王志俊,汤涛林,程 婧
( 中国水产科学研究院渔业机械仪器研究所,上海 200092)
探鱼仪作为海洋渔业中最广泛应用的探测仪器,通过发射声学信号并利用信号遇到目标后反射的水声回波信息来探测鱼群位置和大小[1-3]。近年来,随着信息技术和集成电路的发展,探鱼仪的研发工作进一步向数字多波束[4-7]和宽带[8-11]方向延伸。因具备更高的空间分辨能力[12-14],多波束探鱼仪在海洋渔业精准、高效捕捞中作用日渐增加[15]。多波束声学探测系统利用相控阵技术进行远距离海洋生物探测,通过短时间内顺序发射多个波束后同时接收回波来实现海底探测和生物定位的目的[16]。波束形成算法将一定阵型的换能器各阵子输出信号经过加权处理得到空间指向性[17],发射系统通过波束形成实现在某一方向上信号同向叠加、噪声非同向叠加的功能[18-19],并以此达到在同等发射功率下集中发射能量、提高信噪比的目的。现场可编程门阵列(FPGA)逻辑电路具备并行处理能力,合理安排运算时钟,充分发挥其内部高速时钟和流水线并行处理功能,可在多通道信号生成中发挥独特优势[20]。常见的波束形成实现方法包括数字信号处理器(DSP)+FPGA实现、专用直接数字频率合成芯片(DDS)+FPGA实现以及仅用FPGA实现等。DSP和FPGA相结合的方法使用DSP计算波形数据,再由FPGA进行波束形成[27-28],增加了软硬件控制的复杂度;DDS+FPGA的方法需要使用多片DDS芯片实现信号产生并使用FPGA控制相移[29-30],此方法硬件成本高,不利于系统集成;单片FPGA实现发射系统功能可简化控制并提高集成度,但采用多RAM实现波束形成的方法[31]增加了FPGA资源使用量。
本研究依据256通道全方位多波束宽带探鱼仪在海洋拖网和围网捕捞工作场景中的实际需求,设计了包含发射控制模块、DDS宽带波形生成模块、时延波束形成模块和delta-sigma调制模块的FPGA数字发射系统,并综合现有测试条件,通过实验室水池完成水平相邻4通道发射机的波束指向性测试。
1 圆柱阵波束形成原理
多波束宽带探鱼仪通常采用平面换能器阵和圆柱换能器阵[21]。相较于平面阵,圆柱阵具有搜索跟踪方式灵活、能实现全域覆盖等特点[22-23],可以实现水平360°及垂直60°扫描[15]。圆柱阵机械结构及其物理遮挡决定了每次波束形成仅由部分阵子即一个扇区参加,因此在发射过程中可以采用扫描旋转方式来进行定向发射,即一个扇区发射多个波束后水平旋转至下一个扇区重复发射多个波束[24-25],依次类推直至发射结束。在接收过程中,多波束宽带探鱼仪采用多个阵子同步接收后进行数字信号处理的接收方式来利用回波信号定位鱼群。多扇区旋转发射可保证扇区内不同方位角都可以被扫描覆盖,且发射能量可以集中在阵子正前方一定角度内,保证发射波束形成效果。
圆柱阵结构及其扇区示意图如图 1所示。
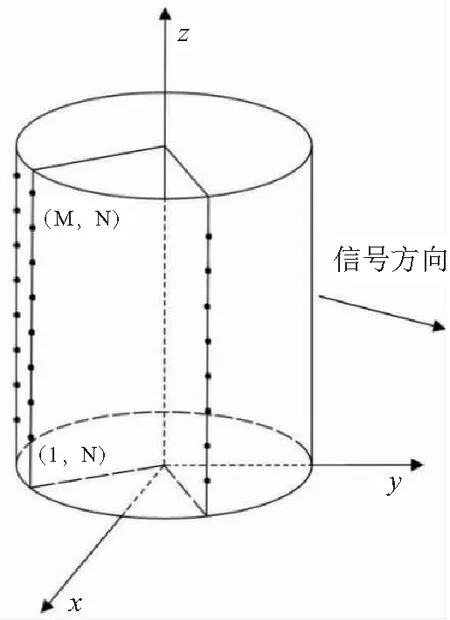
图1 圆柱阵示意图
水平方向N个阵子,即为N列,其中相邻两列上下交错排列;垂直方向M个阵子,即为M行;底面半径为R(单位m)。列编号从X轴右侧起,依次为1~N;行编号由下至上依次为1~M。圆柱阵奇数列上任意一点(M,N)坐标为:
podd=[R×cos(φ0),R×sin(φ0),(M-1)×d-d/4]
(1)
偶数列上任意一点(M,N)坐标为:
peven=[R×cos(φ0),R×sin(φ0),(M-1)×d+d/4]
(2)
式中:φ0为阵子与X轴夹角,单位为弧度;d为垂直两阵子间距,单位为m。
假设信号发射方向为(θ,φ),其中θ为俯仰角(单位弧度),φ为水平方位角(单位弧度),则各阵子相对于原点声程差为:
S=p(m,n)×sin(θ)×cos(φ)+p(m,n)×sin(θ)×sin(φ)+p(m,n)×cos(θ)
(3)
时延值为:
T=s(m,n)/c
(4)
式中:c=1 500 m/s,为声音在水中传播速度。
本研究选取8×32圆柱阵,其中M为8,N为32;半径R为0.185 m,水平两阵子之间夹角为11.25°。
多波束宽带探鱼仪波束形成是为了使得基阵中各阵子的发射信号经一定信号处理后形成在预定方向的指向性。对于一个发射系统,具有指向性意味着发射声能可集中在某一方向,这样可以用较小的发射功率探测更远距离或更小的目标[26]。发射时延波束形成示意图如图2所示,每个阵子发出信号的时延值由各自的声程差决定,幅值频率相位相同的信号经过延时器后得到具有不同时延值的信号。这些信号分别输入各自对应的阵子后发射至水中,不同时延使得波形信号在水中某一特定方向叠加并自然形成指向性,实现发射能量的集中。
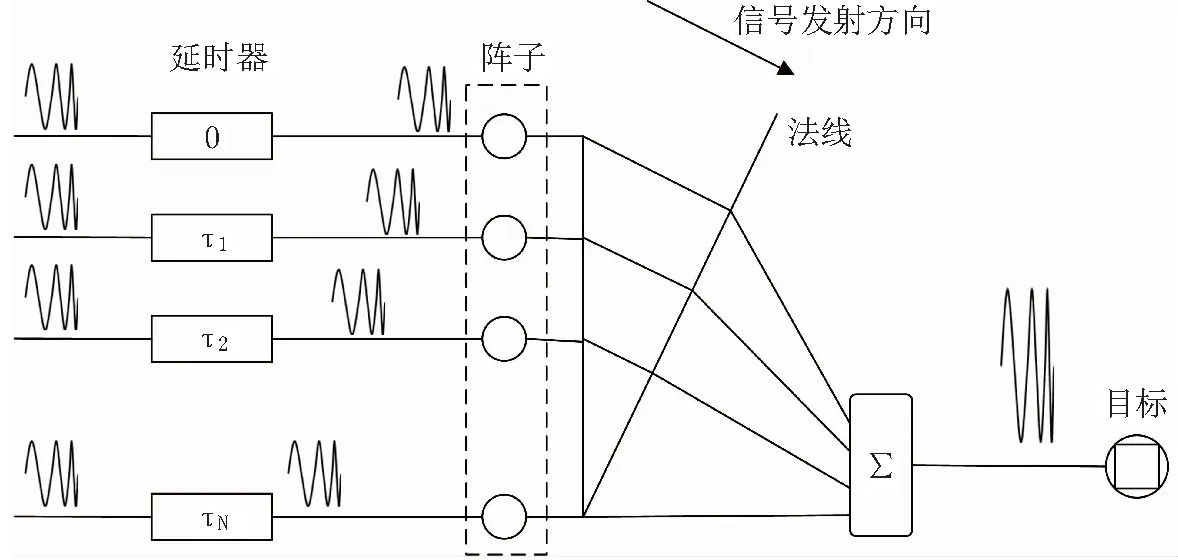
图2 发射时延波束形成示意图
2 FPGA实现原理及模块设计
2.1 系统整体设计
发射框图如图3所示。
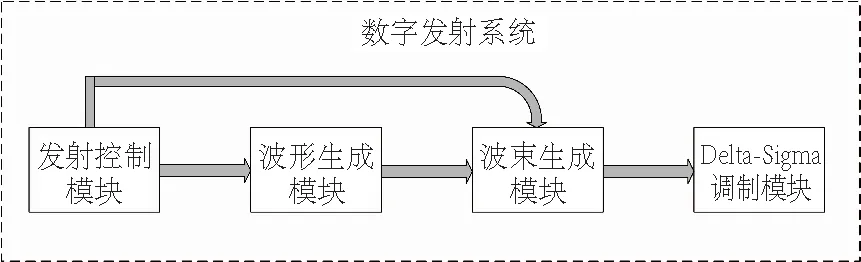
图3 发射框图
相较于单片机,FPGA器件的灵活性及高性能可以使得系统设计更加易于实现。本研究中涉及的FPGA发射模块包括多波束发射控制、DDS波形生成、波束形成时延实现及delta-sigma调制4部分,其中多波束发射控制模块依据技术要求实现发射使能、波形计数及脉宽计数功能。
发射控制模块根据设置参数生成发射使能信号、接收使能信号以及收发转换信号。其中发射使能信号控制波形生成模块,接收使能信号控制接收模块,收发转换信号通过引脚输出直接控制开关电路。
收发转换过程根据图 4时序进行控制。在一个周期内完成一次收发过程,正程为接收过程,逆程为发射准备、发射、等待过程,一次扫描通过多次发射,发射之间存在发射间隔,在发射和等待过程中收发转换信号(TR)为低,无法接收。
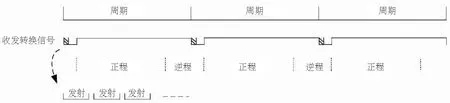
图4 收发转换过程
波形生成模块通过直接数字频率合成器生成发射波形,波束形成模块通过时延实现波束形成,Delta-Sigma调制模块对时延后各路信号进行调制输出,调制后的两路差分信号通过引脚输出用以驱动发射电路。发射控制状态机如图5所示,初始状态为空闲态。
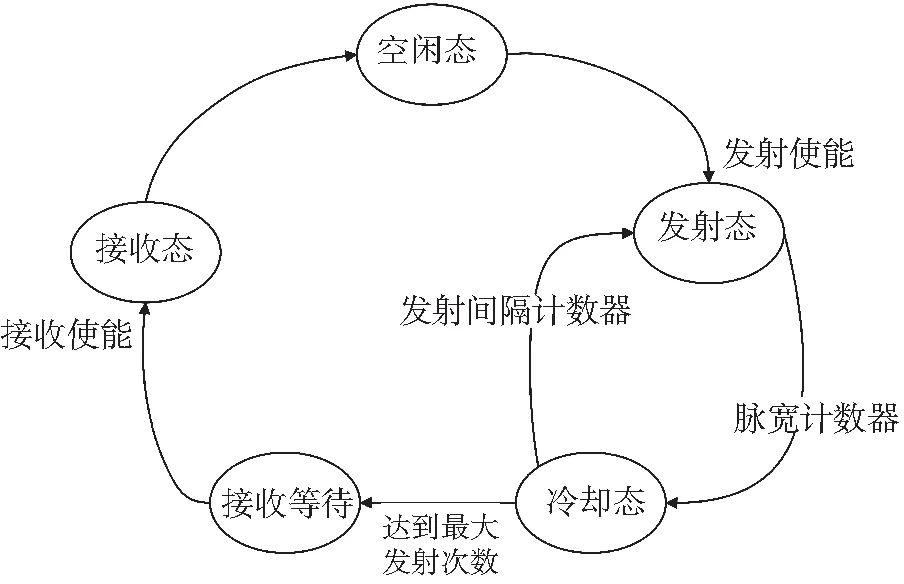
图5 发射控制状态机
当周期开始信号为1时,状态机跳转至发射态同时脉宽计数器开始工作,此时发射使能信号置1。当脉宽计数器至最大值时,状态机跳转至冷却态,同时发射间隔计数器开始工作。冷却态为两次发射之间的等待时间,当发射间隔计数器至最大值时状态机再次跳转回发射态,循环往复直至达到最大发射次数,随后状态机依次跳转至接收等待和接收态,完成本周期收发后跳转回空闲态并等待下一次周期开始信号。
2.2 宽带信号的DDS实现
直接数字频率合成(Direct digital synthesizers,DDS)是一种在固定频率的参考时钟作用下,利用相位累加器及查找表生成正余弦波形的方法。FPGA DDS IP核框图如图6所示,其中相位控制字及初始相位为IP核输入参数,波形为输出值;IP核内部包含一个相位累加器和一个用以存储单周期波形的查找表。
相位控制字(Δθ)为所需生成波形相邻两个采样点之间的相位差。在参考时钟的作用下,相位寄存器的值以初始相位值为基础,每个时钟上升沿增加一个相位控制字,通过相位累加器输出当前相位,并使其作为地址对ROM进行查找随后输出波形。
线性调频脉冲信号实部可表示为:
s(t)=cos(2πf0t+πkt2),t∈[0,T]
(5)
其瞬时频率为
f(t)=f0+kt,t∈[0,T]
(6)
式中:k=B/T,k为信号频率变化率,B为信号带宽(单位Hz);f0表示起始频率(单位Hz);T表示脉冲宽度(单位s)。本研究采用20 kHz~30 kHz的宽带信号,带宽10 kHz,中心频率为25 kHz。
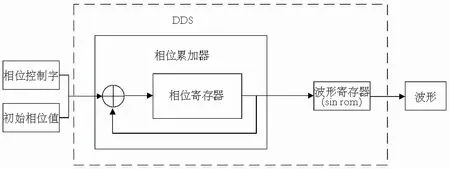
图6 DDS原理图
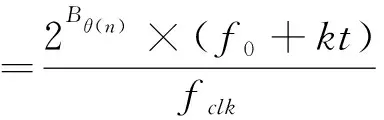
根据DDS IP核文档,当前输出频率fout与相位控制字Δθ关系如下:
(7)
式中:Bθ(n)为相位的位数(32位),fclk为参考时钟频率,即采样频率或计算频率(此处选择1M/通道)。
由式(6)、式(7)可得:
(8)
则
=85 899 000+42 950n/pw
(9)
式中:pw为脉宽(单位ms),n=fclk×pw×10-3,为采样点数。
发射链路中使用单通道DDS进行信号生成。LFM信号生成时因频率变化频繁,故Δθ以streaming模式配置,初始相位则配置为0。波形生成时,在每个1 M时钟的上升沿DDS输出一个波形数据点,持续输出直至本次发射结束。
2.3 波束形成
波束形成模块通过对前一级模块输出的波形数据进行时延来实现发射波束形成功能。DDS输出的波形数据在数据有效信号为1 时以1 M的时钟频率写入一个由大小为256×8 bit的双口RAM构成的缓存区中。位置存储指针作为缓存区端口A的写地址在每个1M时钟的上升沿加1,并在累加至255时清零以达到循环写入的目的。
在指定波束方向下,发射根据各通道声程差通过时延实现波束形成。每个1 M时钟内采用200 M为工作时钟依次读取32通道的数据,每通道预留6个时钟,并在第一个时钟时将时延使能信号置1。以水平扫描发射模式下第一个波束为例,时延使能信号为1时时延状态机以指针与BRAM0输出的时延参数差值为缓存区端口B读地址进行对应通道的波形读取,并依次将读取的各通道时延后波形值存入寄存器时延波形中以供后续模块使用。图7为水平扫描发射模式下第一个波束形成示意图。
其中样点0~样点255依次为DDS输出数据采样点。采样点的个数取决于脉宽,如1 ms波形在1 M频率下样点数为1 000个,16 ms为16 000个。所有样点循环存入缓存区中。BRAM0仅示意第一个波束通道0~通道31的时延数据, 通道0_样点0~ 通道31_样点0为当前时刻各通道发射波形。
波束形成时延状态机如图 8所示,初始状态为空闲态。状态机处于空闲态时,当clk_1M上升沿出现且数据有效信号为1时,时延缓冲区地址写地址寄存器写入当前指针值,时延缓冲区写数据寄存器依次写入DDS数据。当时延使能信号有效时,状态跳转至补偿态。状态机处于补偿态时,首先进行当前指针值与对应补偿参数大小的判断。若指针大于参数值,则缓冲区地址写入指针数值减去时间补偿参数;反之则需进行减法后加上256。完成上述操作后状态跳转返回态而后跳转至空闲态进行同一采样时钟下后续通道的时延计算。状态机在一个1M时钟内完成全部32路时延参数读取及波形输出后,当数据有效信号下降沿出现时,状态机跳转至清除态进行缓存区与其端口的清零操作;清零操作完成后,状态机再次跳转回空闲态等待数据有效信号上升沿出现,直至本次发射结束。
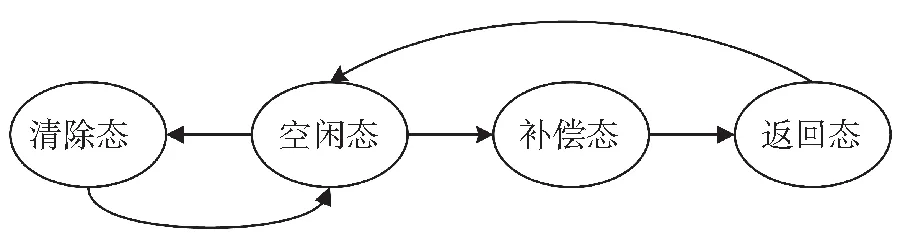
图8 时延状态机
图9为4通道波束形成时延仿真示意图,发射信号为20 kHz~30 kHz、脉宽1 ms的宽带信号,由上至下每路信号时延均为20 μs。
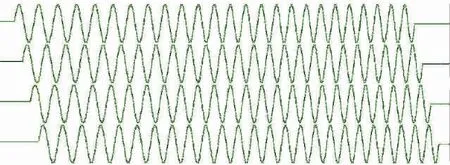
图9 波束形成时延仿真图
2.4 Delta-Sigma调制
Delta-Sigma调制技术,其调制器可将高采样率、高精度的数字信号量化为1 bit低精度脉冲信号。输出的脉冲信号直接连接模拟电路,驱动模拟电路中MOS管以达到放大信号的作用;放大后的信号随后通过低通滤波器解调,转化为模拟信号发送至换能器。数字调制器和后级功率放大电路、低通滤波电路共同组成D 类功放。
2阶DS 误差反馈型调制器由积分器、减法器、量化器以及负反馈回路组成。相较于1阶调制器,2阶调制器性能更优,可以获得更高的信噪比;而2阶负反馈调制器相较于2阶标准型结构更为简单且易于实现。16 bit量化器起到比较器作用,对累加值与0进行比较,并将量化前后差值反馈至输入端与输入数字信号进行累加。反馈回路起到重新分配量化噪声的作用,通过将量化噪声整形到高频阶段来达到减少带内噪声、提高信噪比的目的,Delta-Sigma调制器框图如图10所示。
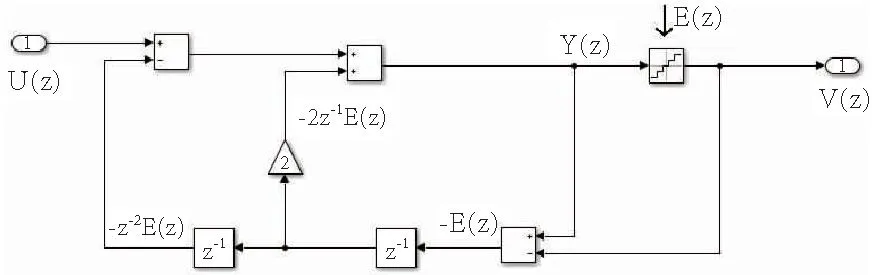
图10 Delta-Sigma调制器框图
其中V(z)为调制后输出1 bit信号,U(z)为输入数字信号,本设计中为16 bit。E(z)为量化器带来的误差,Y(z)为量化前信号。由框图可知:
V(z)=Y(z)+E(z)
(10)
将Y(z)代入得:
V(z)=U(z)+(1-z-1)2×E(z)
(11)
由上式可得,信号传递函数STF(z)=1,噪声传递函数NTF(z)=(1-z-1)2。
通过对调制生成脉冲波形进行仿真,得到如图11所示频谱图。由图11可见,大量噪声被转移到高频部分,因此仅通过低通滤波器便可完成调制信号的解调及波形的复原,实现调制器与后续模拟电路构造D类功放的目的。
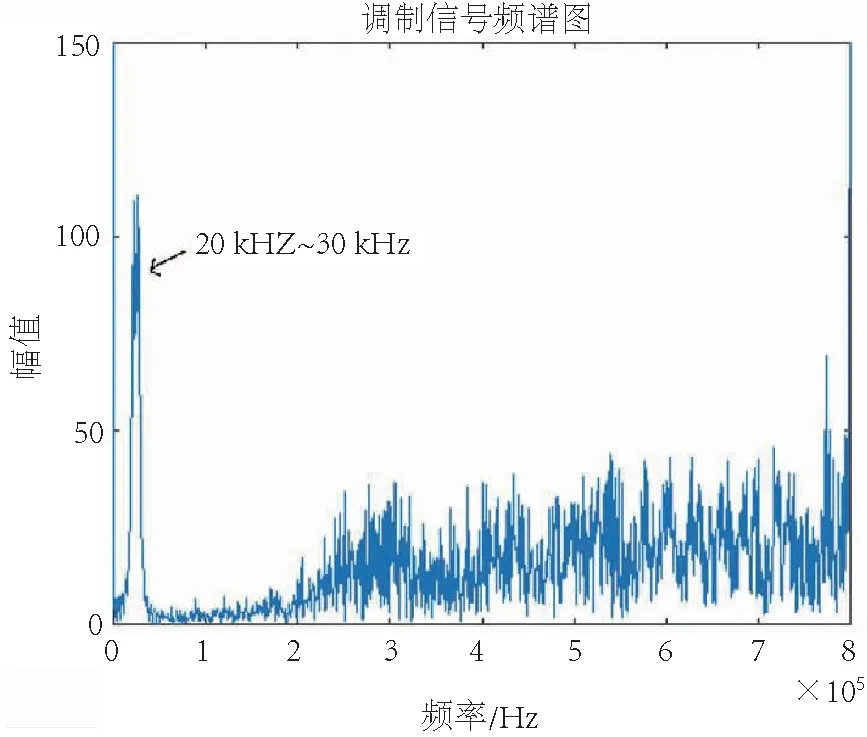
图11 调制信号频谱图
3 结果与分析
3.1 水池试验及波束指向性
为了验证本研究设计的数字发射系统功能及测试实际发射波束形成性能,搭建了试验平台进行水池试验。试验装置如图12所示,发射换能器为1×32阵子单层圆柱体,相邻两列阵子高低交错排列;换能器及连接件固定于旋转装置上,入水深度2.75 m。接收标准水听器与发射换能器处于同一深度,相距5.5 m,与采集板卡相连;后者通过网口将接收到的数据传输到计算机进行处理。
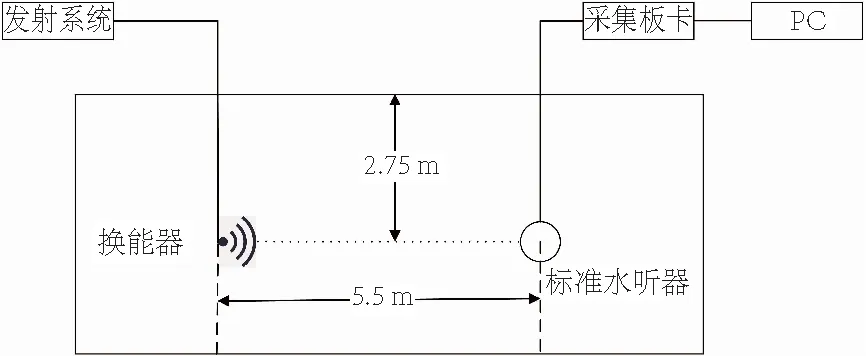
图12 水池指向性测试实验平台
综合考虑水池试验条件,测试仅使用换能器位于同一水平面的相邻四阵子进行发射测试。发射信号选取频率20 kHz~30 kHz、脉宽1 ms的宽带信号,发射周期为30 ms,时延后发射信号示波器截图如图 13所示,由上至下每路信号时延均为20 μs。
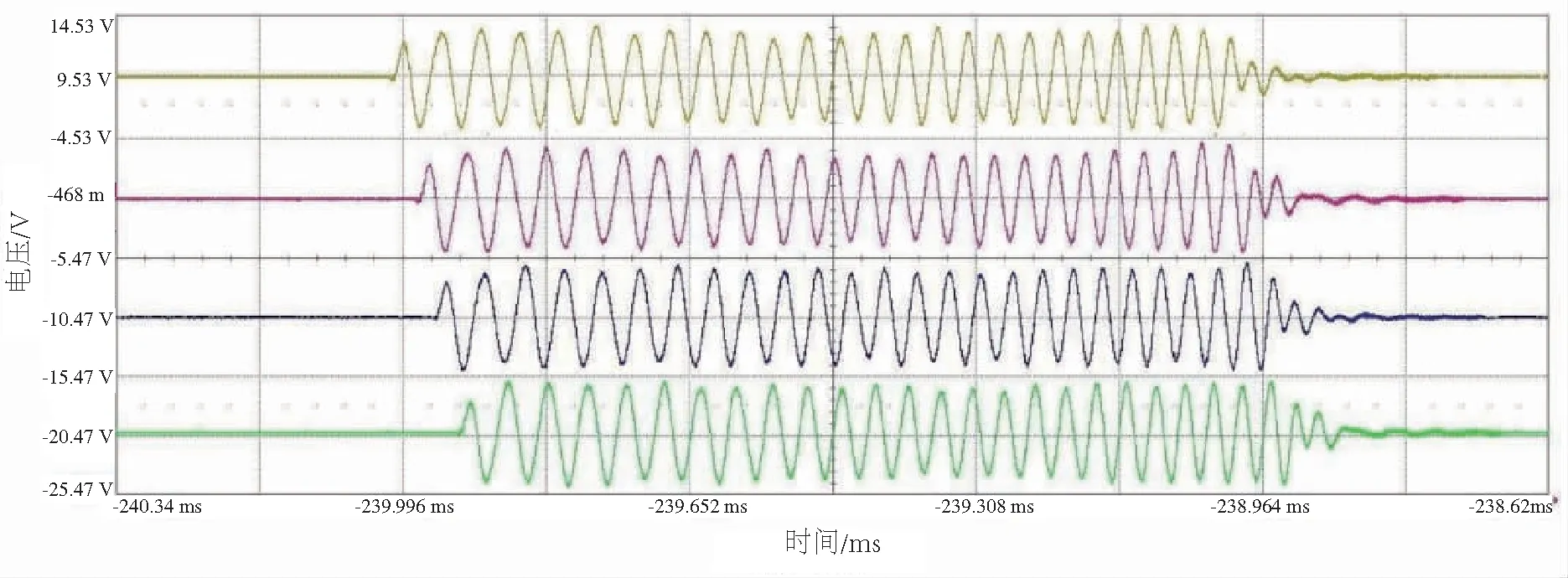
图13 发射时延波形示意图
试验过程中旋转装置以 2°/s速度旋转360°,分别测试仿真波束水平角度为±15.75°、±11.25°、±6.75°、±2.25°时实际波束角度。其中仿真坐标系以两阵子连线中点为X轴方向,实测极坐标0°为中央两阵子无时延时指向性最大角度,逆时针为极坐标正方向。
3.2 误差分析
图 14及图15测试结果汇总如表1,实测角度取-3 dB两点连线中点角度值,仿真阵子指向性使用实测单阵子数据。波束开角实测与理论仿真[26]基本吻合,误差在±1.25°内,可能因旋转装置旋转速度与采集频率误差引入;测试值与理论值峰值相当,误差小于1%,差异最大为0.4 dB,出现在-15.75°处,可能由换能器束控特性引起。
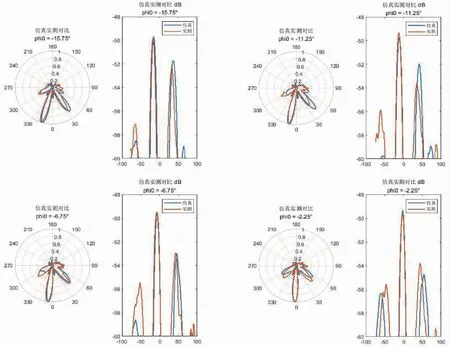
图14 发射指向性(反向)
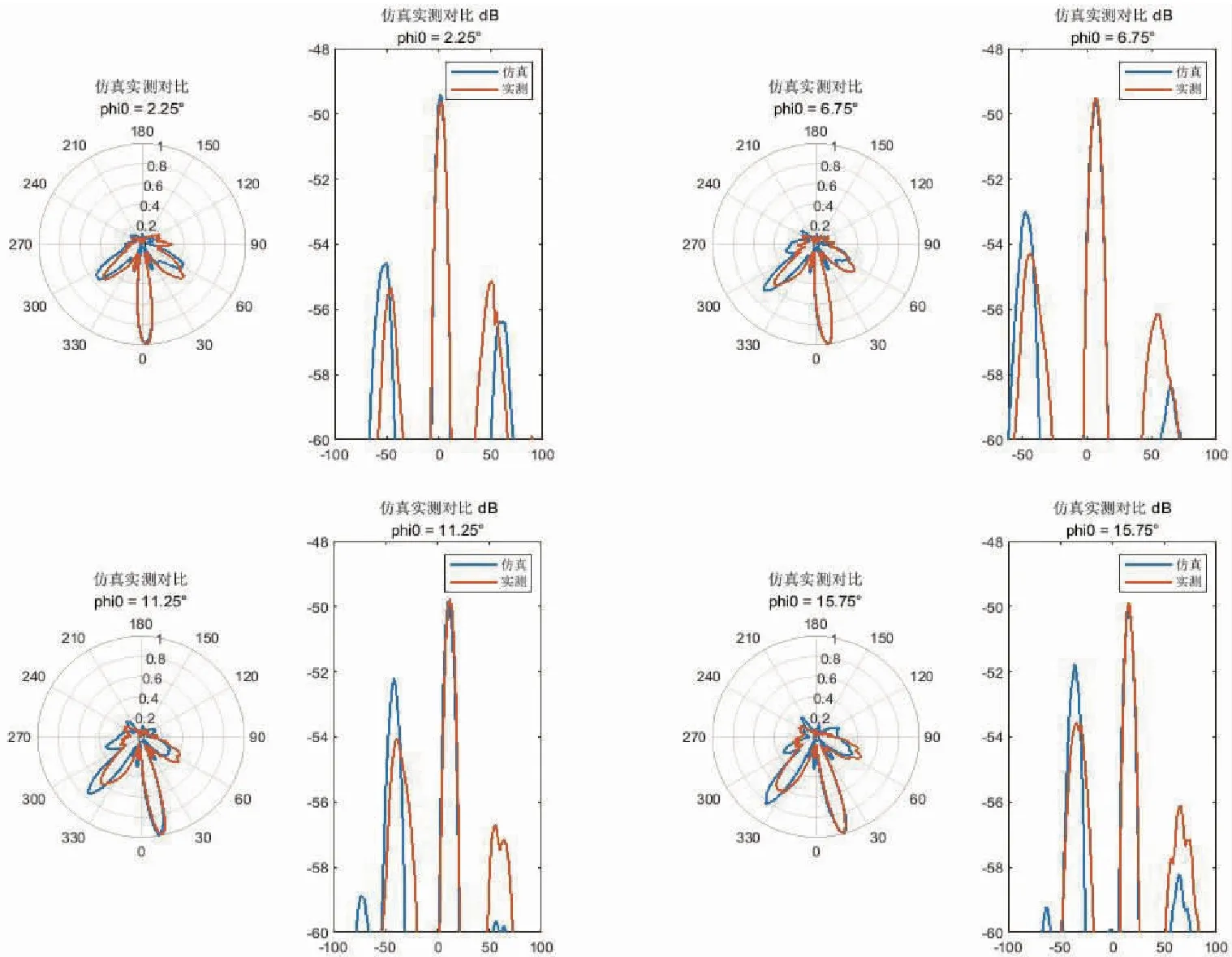
图15 发射指向性(正向)
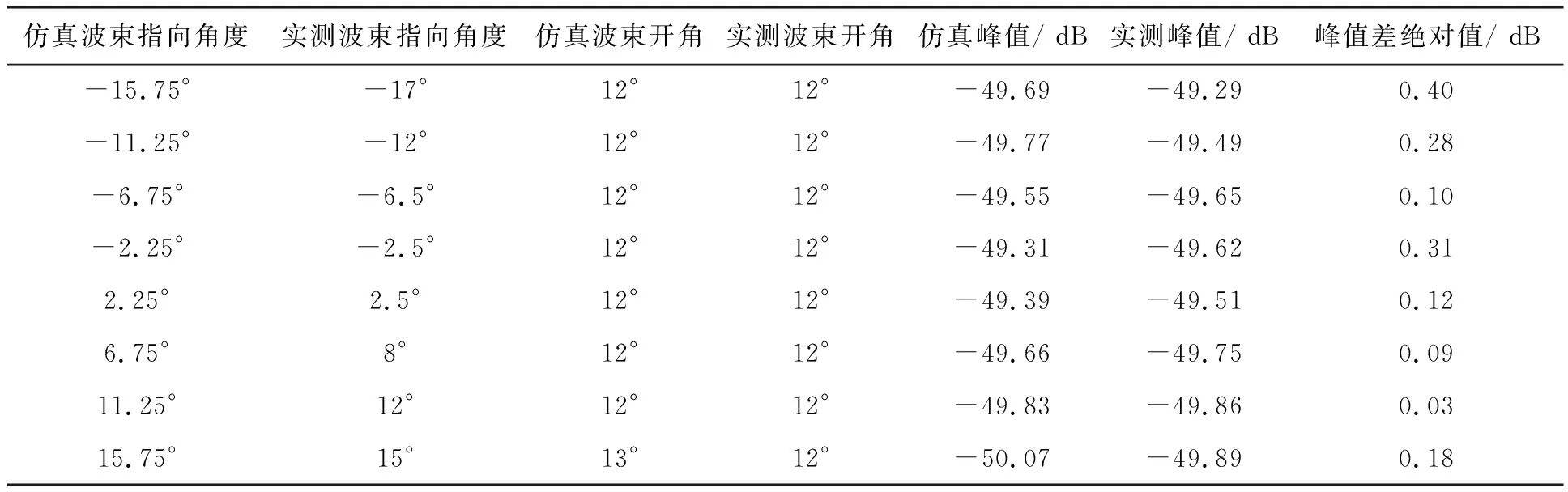
表1 仿真测试对比
试验仿真部分计算声程差时选取信号频率为20 kHz~30 kHz宽带信号的中心频率25 kHz。因试验条件所限,选取同一水平面的连续四阵子,其中相邻两阵子圆心角为22.5°。图16为水平方向不同阵子数[24]N的仿真指向性图,N分别为16、24及32,即相邻两阵子圆心角分别为22.5°、15°及11.25°。如图所示,试验所采用的22.5°圆心角降低主瓣宽度的同时增加了旁瓣高度。
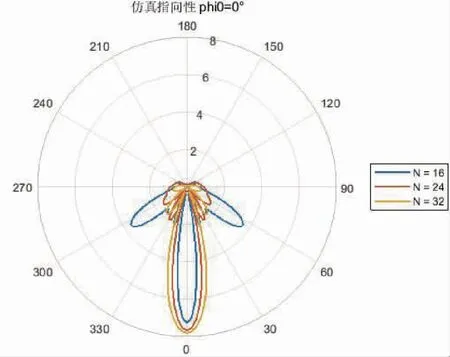
图16 水平方向不同阵子数指向性对比
4 结论
本研究设计的多波束发射波束形成的FPGA实现方法经过软件仿真与测试验证,能够有效实现宽带信号发射及波束形成,水池测试表明4阵子波束指向性与仿真结果基本符合,可以达到能量聚焦的目的。因水池测试环境所限,本研究仅利用水平4个阵子及其形成的波束数据,且仅测试阵子正前方30°内波束形成。今后的研究及测试将着眼于多阵子水平波束形成及垂直波束形成指向性,进一步完善本设计和测试方案。
□
