末敏弹多元红外探测与目标识别定位方法研究
2022-06-06王丹妮蔡文泽
王丹妮,李 野,蔡文泽,孙 策
(1 长春理工大学理学院,长春 130022;2 西安现代控制技术研究所,西安 710065;3 中国科学院西安光学精密机械研究所,西安 710119)
0 引言
末敏弹是现代战场中一种灵巧作战武器,它利用探测器对地面目标进行扫描、探测、识别、定位,最终起爆战斗部,命中目标。当末敏弹下落到距离地面满足射程的一定高度时,开始匀速下落且以一定的转速对地面目标扫描探测,进行目标识别和定位。目标的有效识别和精确定位是实现精确打击的先决条件。
现有末敏弹的探测器基本上采用单元红外辐射计,利用目标和背景热特性的不同,实现对目标的探测与识别,但这种方式缺乏目标的尺寸信息,定位精度不高。因此目前通过对目标尺寸的获取实现对目标的精确打击已成为末敏弹探测技术发展的重要方向。在此背景下,多元红外探测及识别定位方法研究成为末敏弹探测技术研究的热点。
为研究多元红外探测器的目标识别和定位过程,建立了线阵红外稳态扫描模型,提出了一种多元红外扫描探测及目标识别定位方法。通过仿真分析,比较了单元和多元红外探测器识别定位能力,为末敏弹多元红外探测及目标识别定位提供了基础和有价值的参考。
1 线阵红外扫描探测模型
1.1 末敏弹稳态扫描工作原理
末敏弹经火炮发射后,飞行到指定区域上空,母弹开舱抛出子弹,末敏子弹减速减旋稳定后进入稳态扫描阶段,稳态扫描原理如图1所示。

图1 末敏子弹稳态扫描原理
末敏弹以扫描角、转速,下落速度对地面扫描,稳态扫描状态下,可近似认为,,为常数。扫描间距为Δ,初始扫描位置为,初始位置与轴成角度,经时间后为扫描螺线上的点,其坐标可表示为:

(1)
相邻螺线的距离Δ为:

(2)

1.2 线阵红外扫描探测方式
与单元扫描不同的是,线阵红外扫描利用线性排列的红外探测器同时扫描探测地面目标,如图2所示,为线阵红外探测器扫描线速度。
图2 红外线性阵列探测
单元红外扫描只含有一条扫描线,扫上目标时产生目标幅值响应,起爆战斗部攻击目标。单元扫描无法获取目标尺寸信息,只能通过对目标温度的幅值响应排除伪目标。另外,单元扫描获取的是一维尺寸信息,无法获取目标的二维尺寸信息,无法实现目标定位。而多元红外扫描可以获取目标尺寸和方位信息,利用对温度的幅值响应和尺寸信息共同识别目标,提高伪装目标的识别能力。
2 目标识别与定位方法
与单元红外扫描不同的是,多元红外扫描探测时,实时处理多路信号,从多路信号可以识别和定位目标,目标识别和定位算法如图3所示。
图3 目标识别与定位算法
线阵红外探测器扫描探测目标,获取目标信息,该过程如图4所示,信号幅值变化如图5所示。
图4 多元红外扫描过程示意图
图5 扫描信号幅值变化
以图4(a)为目标未进入扫描区域时,只有地面辐射响应,如图5的区域所示;图4(b)为目标部分进入扫描区域,边缘探测元响应,产生目标幅值响应;图4(c)为目标完全进入扫描区域。这时利用设置的幅值阈值(和分别为低高幅值阈值)检验目标的响应幅值是否在高低阈值的限定范围,如图5的区域所示。利用式(3)判断该幅值响应是否为待攻击目标发出的。

(3)
多元扫描探测利用不同探测单元的响应和时序关系判断目标位置,当边缘探测单元探测到目标,而中心探测元未探测到目标时,如图4(b)所示,这时并不起爆战斗部,而是让末敏弹继续旋转。当目标热区完全进入扫描区域时,如图4(c)所示,利用每条探测信号的上升沿和下降沿时刻和各扫描信号的时序关系可以计算出目标的尺寸信息。判断目标尺寸是否为预攻击的目标尺寸,判断准则如式(4)所示。

(4)
式中:假设目标热区为正方形,为扫描计算出的目标热区边长;′为实际的目标热区边长;为计算出的目标热区面积;′为实际的目标热区面积;Δ、Δ无限趋近于0。当满足式(4)时,扫描计算出的目标热区尺寸为待攻击的目标热区尺寸。
3 仿真与结果分析
对末敏子弹目标识别和定位算法进行仿真实验。仿真中,固定子弹位置为坐标原点,子弹从初始120 m开始进入识别与定位过程,低于20 m停止扫描;目标热区尺寸为1.8 m×1.8 m,目标中心等概率落在坐标原点周围120 m×120 m的区域,子弹转速为5 rad/s,落速为10 m/s,扫描角为30°,地面温度为10°~15°。
3.1 目标识别仿真
分别仿真单元末敏弹和7元末敏弹旋转下落过程,各扫描6次,每次地面上放有一个典型目标,验证单元和多元探测器的目标识别能力。典型目标热区参数如表1所示,单元和7元仿真过程如图6所示。
表1 目标热区参数表
图6 单元和多元探测器目标识别
表2为单元和多元探测器目标识别结果,从该表可以看出,单元探测器识别只能利用温度阈值判断目标真假,不能识别不同尺寸的伪目标,而多元探测器可以利用尺寸和温度共同识别目标。
表2 单元和多元探测器识别结果
3.2 目标定位仿真
分别仿真单元末敏弹和7元末敏弹旋转下落过程,各扫描6次,每次地面上放有一个目标,验证单元和多元末敏弹的定位能力。目标热区中心坐标如表3所示,单元仿真和多元仿真过程如图7所示。
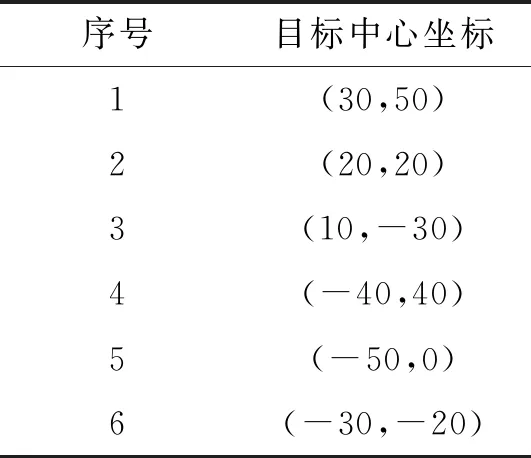
表3 目标热区中心

图7 单元和多元末敏弹目标定位
表4为单元和多元探测器目标热区定位结果。
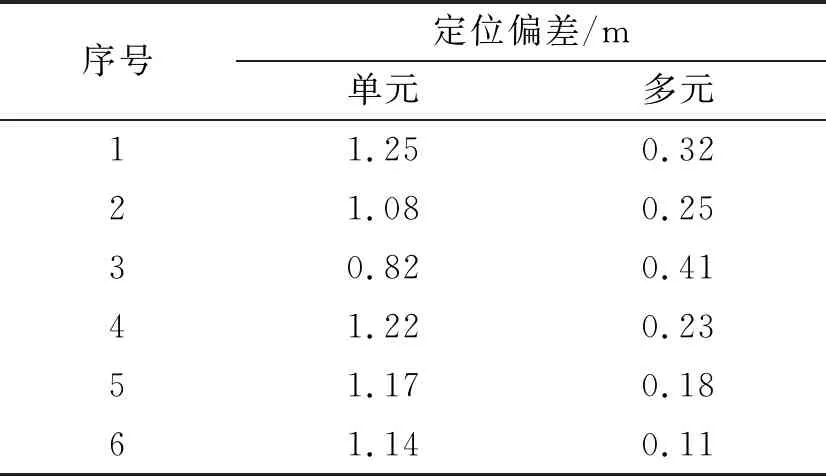
表4 单元和多元探测器目标热区定位结果
从表4可以看出,单元探测器定位能力差,扫描线扫到目标什么位置则定位到目标什么位置,然后起爆战斗部;而多元探测器不同,当多元探测器边缘探测元探测到目标时,并不起爆战斗部,允许目标热区进入到多元探测器扫描的中心区域后再起爆战斗部,提高了定位精度。
4 结论
文中建立了末敏弹线阵红外扫描探测模型,提出了多元红外扫描探测目标识别与定位方法,并对所提方法进行了仿真验证和分析。仿真结果表明与一元红外扫描探测相比,采用线阵红外扫描探测可以获取目标热区尺寸,提高目标识别能力和定位精度。
