多波束三维成像激光雷达高精度收发匹配方法研究*
2022-06-03李凉海曹海翊赵一鸣刘宇哲
潘 超,李凉海,曹海翊,赵一鸣,刘宇哲
(1 北京遥测技术研究所 北京 100076 2 中国空间技术研究院遥感卫星总体部 北京 100094)
引 言
三维成像激光雷达技术为空间地理信息获取、目标立体探测提供了新的技术途径。随着激光分束技术、阵列收发技术、阵列单光子探测技术的发展,以及激光器与探测器等组件的不断成熟,三维成像激光雷达技术逐渐从早期单点扫描体制向线阵推扫体制、大规模阵列成像体制不断演进。以多波束并行收发、单光子阵列探测为特征的新一代三维成像激光雷达探测灵敏度越来越高,成像帧频越来越快。同时,新体制也使得雷达系统的体积、重量、功耗进一步减小,可靠性和实用性有效提升[1-4]。
三维成像激光雷达由于发射激光波束发散角小,接收视场角小,需要调节收发光轴匹配,使激光的远场足印位于接收视场中心,以保证目标的散射信号可以最大效率地被接收处理[5-8]。激光发散角过大会造成照射在目标上的光斑变大,不仅影响分辨率,而且由于地形起伏与坡度带来的回波脉冲展宽效应更为严重,更加恶化距离测量精度[9];系统接收视场决定着背景光噪声强度,对于光子计数雷达,其探测灵敏度达到光子量级,对背景光干扰更加敏感,需极致压低背景噪声,从而有效提取目标光子,因此接收视场需进一步降低[10];同时,在工程应用中,由于不同材料有不同的线涨系数,环境温度变化会造成收发光轴的微弱变化,造成收发光轴失配,影响接收效率。因此,工程上将光子计数激光雷达的激光发散角设计为百微弧度以下,考虑到空间杂散光控制与环境适应性,接收视场为发射视场的2~4 倍[10]。由NASA 设计的机载光子计数雷达MABEL 的发散角为100 μrad,接收视场角为210 μrad[11],ICESat-2 卫星主载荷 ATLAS 光子计数雷达的发散角仅有 20 μrad,接收视场角为83 μrad[12,13],随着激光三维成像雷达向多波束发射、单光子探测的不断发展,系统的收发匹配裕量越来越小,匹配难度越来越高[14]。
本文涉及的多波束单光子阵列三维成像激光雷达,不仅需要单个波束的精确匹配,还需考虑波束之间的排布关系与波束间串扰,这对波束收发匹配提出了更高要求。本文聚焦激光雷达多波束收发匹配难题,设计了基于衍射分束激光发射与光纤阵列接收的收发光学系统,提出了一种多波束激光雷达收发波束匹配方法,并对该方法的收发匹配误差源以及温度对其影响进行了详细分析仿真。实验验证结果表明,本文的匹配方法可实现64 波束优于10 μrad 的匹配误差,在工作温度范围内总的收发失配优于20.78 μrad,满足本系统设计时25.5 μrad 的收发匹配裕量,系统对环境温度有较好的适应性,具有良好的工程应用前景。
1 多波束单光子三维成像激光雷达收发系统
本文设计的多波束单光子阵列三维成像激光雷达收发系统原理框图如图1 所示,系统采用收发异置的结构形式,光纤激光器、扩束镜、衍射分光器DOE 组成发射光学系统,实现对光纤激光器出射激光脉冲的扩束与衍射分光,产生16×4 倾斜排布的64 束光束,单波束发散角为50 μrad,光束间隔角为333 μrad,出射光束阵列两重复方向X 和Y 的夹角为14°。接收望远镜、光纤阵列、双远心镜头与滤光片、单光子探测器组成接收光学系统,用于分视场接收每个光斑的目标散射光信号,并完成窄带滤光与光电转换。接收望远镜有效口径100 mm,X 方向瞬时视场为0.3°,Y 方向瞬时视场为0.07°,单波束接收视场角设计值为144 μrad。在接收望远镜焦面通过阵列光纤实现焦面耦合分视场接收,望远镜焦面处光纤排布方式与激光远场足印一致,光纤阵列另一端分为4 束4×4 的光纤束,每束光纤通过双远心镜头、窄带滤光片,缩束与背景光滤除后耦合至单光子探测器对应像元。单光子探测器选用4 个4×4 盖革模式的铟镓砷(InGaAs)阵列单光子探测器实现激光回波光子信号的光电转换。

图1 多波束单光子阵列三维成像激光雷达收发系统原理框图Fig.1 Schematic diagram of multi-beam 3D imaging LiDAR transceiver
2 多波束收发匹配方法与误差分析
2.1 多波束收发匹配理论基础
多波束激光雷达系统中,对于任意单个波束,扩束后发散角为θT,对应的接收视场角为θR。如果波束严格匹配,则激光在远场光斑中心与接收视场中心重合[15],如果波束失配,则激光远场光斑部分或完全偏离出接收视场。工程中,一般设计θR为2~4 倍θT,此时,收发光轴在的偏移量条件下,发散角仍在接收视场范围内,激光发射能量的后向散射回波可被望远镜完全接收,当偏移角超出此范围,则会造成收发光轴部分失配与完全失配,损失回波能量,降低探测信噪比,造成激光雷达作用距离急剧下降甚至失效[16]。根据工程经验,收发匹配精度需满足:

收发匹配原理如图2 所示。对于多波束激光阵列成像系统,任一波束的匹配不仅与当前波束的发散角和视场角相关,还与波束间夹角相关。根据光学设计原理,本系统发射波束的发散角由发射光纤参数、激光扩束系统参数决定,发射波束夹角由DOE 设计与加工精度决定。接收视场角由接收望远镜设计、接收光纤芯径决定,相邻视场夹角由接收望远镜焦距与相邻光纤间距决定。设激光波长为λ,发射光纤芯径为rT,发射扩束镜焦距为fT,DOE 刻蚀周期为T,接收光纤芯径为rR,接收望远镜焦距为fR,接收光纤阵列间距为dR,则单波束激光发散角为:

图2 激光雷达波束收发匹配原理Fig.2 Principle of lidar transceiver alignment


本系统发射光纤芯径设计为30 μm,发射扩束镜焦距为600 mm,DOE 刻蚀周期为3.195 mm,接收光纤芯径为60 μm,接收望远镜焦距为417 mm,接收光纤阵列间距为138.9 μm。由式(2)~式(5)可计算得到,系统单波束发散角为50 μrad,单波束视场角为144 μrad,发射相邻波束夹角与接收视场夹角相等为333 μrad。由式(1)计算可知,系统收发匹配精度需优于25.5 μrad。
2.2 多波束收发匹配方法
在工程中,发射光纤与激光扩束镜焦面的位移和偏转角,DOE 加工精度,接收光纤的排布精度及其与接收望远镜焦面的位移和偏转角度等都会影响收发匹配,因此,需要研究一系列的收发匹配方法与装调手段。为解决上述问题,采用长焦平行光管模拟无穷远的激光发射远场光斑和望远镜头远场接收视场,通过放置在平行光管焦面处的光斑分析仪对光斑成像,通过高精度六维调整机构(PI)进行高精度调节,实现发射系统指标、接收系统指标以及多通道阵列收发光轴匹配。
本文激光雷达系统发射采用DOE 分束方式,接收采用阵列光纤的方式接收,收发匹配调节时,激光光源经过扩束镜头和DOE 后,射入平行光管,平行光管焦平面处光斑分析仪(CCD)上显示的阵列光斑即为发射系统的远场光斑,通过光斑分析仪可以测量发射单波束发散角和光束间隔角数值;同时可以在接收望远镜头焦平面的光纤阵列末端引入射入同一波长激光,由接收光学系统入瞳处发出,射入平行光管,由光路可逆原理可知,平行光管焦面处形成的光斑为接收望远镜头的接收视场,通过光斑分析仪可以测量接收光学系统单波束接收视场角和视场间隔角[17-19]。通过调整望远镜焦面处光纤阵列的方向确保接收视场与设计基准方向平行,同时通过旋转扩束镜的角度确保发射远场光斑落在远场视场中心,通过高精度六维调整机构微调望远镜像面处光纤的方位和俯仰方向实现望远镜视场脚点的移动,进而实现发射远场阵列脚点与接收远场阵列脚点匹配。收发光轴匹配装调测试系统原理如图3 所示。

图3 收发光轴匹配装调测试系统原理框图Fig.3 The installation and adjustment system of LiDAR alignment
针对4×4 阵列光纤通过双远心镜头耦合到4×4 阵列探测器相应像元的匹配问题,让每一束4×4 光纤束对应的4 个角点位置的光纤可断开,通过外接激光器可实现单根独立点亮。4×4 阵列光纤与双远心镜头耦合时,通过向接收望远镜入射平行光,调节阵列光纤4×4 端与双远心镜头的相对位置和夹角,使得光斑分析仪上测得的4×4 光斑与设计值一致。阵列光纤与双远心镜头光轴匹配测试系统原理如图4 所示。

图4 阵列光纤与双远心镜头光轴匹配测试系统原理框图Fig.4 The installation and adjustment system of double telecentric lens
调节双远心镜头与4×4 阵列探测器的相应像元耦合时,断开4×4 光纤束的4 个角的光纤,分别向每束光纤耦合激光信号,利用PI 高精度调整机构调整双远心镜头,使探测器对应像元光子计数率最高且相邻像元无串扰,完成像元耦合装调。双远心镜头光轴与阵列探测器像元匹配测试系统原理如图5 所示。

图5 双远心镜头光轴与阵列探测器像元匹配测试系统原理框图Fig.5 The installation and adjustment system of detector array
2.3 多波束收发匹配误差分析
影响系统收发匹配精度的主要因素为系统的加工误差、装调引入误差、系统紧固误差以及环境温度变化引入的收发匹配误差。系统加工误差中,决定系统发散角与视场角的加工误差大部分可由上述装调消除,决定波束夹角的DOE 加工误差、光纤排布误差无法通过装调消除,设为δ1。装调误差主要由光斑图像的测量误差与装调调整机构的调整精度带来,设为δ2。装调完成后紧固系统带来的位移变化也对匹配精度有一定影响,其误差设为δ3。而由于系统结构线胀系数不同,环境温度变化将会带来结构形变,从而引起收发光轴变化带来收发匹配误差,设为δ4。由误差传递公式,系统总收发匹配误差如式(6)所示。
本文所设计的DOE 周期为3.195 mm,刻蚀精度优于0.1 μm,对光束点阵的角间隔基本无影响,因此,DOE 加工误差对系统光轴的影响可忽略。由光纤阵列检测结果得到光纤阵列相对位置加工误差为2 μm,望远镜焦距为417 mm,即由于元件加工引入误差为4.8 μrad。
在光轴匹配过程中,监测焦面处光斑图像的光斑分析仪选用美国Spiricon 公司的SP920s,该款光斑分析仪有效像元尺寸为4.4 μm,由于分析软件是根据像元数量来衡量光斑大小,装调的平行光管焦距为2 m,可计算出CCD 光斑分析仪测量误差会引入2.2 μrad 的光轴匹配误差。高精度六维调整架选用德国PI 公司H-811.I2 型位移台,根据几何光学原理,沿X轴、Y轴、Z轴的位移变化不会对收发匹配角度产生影响,只有绕X轴、Y轴、Z轴的旋转变化会产生装调误差,H-811.I2 型位移台的最小旋转步距为2.5 μrad,可计算出由于调整台旋转精度会引入4.33 μrad 的光轴匹配误差,则由装调引入的误差为4.86 μrad。
本文装调完成后采用胶合方法,可以避免反复地修切垫片,极大地缩短了装调周期,降低了装调难度。但由于胶层厚度的不均匀性,导致胶层固化收缩时产生角度误差,本系统采用双组份环氧胶,该胶具有操作时间长,固化周期短,固化收缩率低等特点,被广泛应用于光学元件固定。在实际装调中,利用塞规测得胶合件最大边缘缝隙与最小边缘缝隙之差为0.025 mm,即胶层厚度差为0.025 mm,本环氧胶的固化收缩率约为1 %,胶合件直径为42 mm,则计算得出由于胶层的固化收缩引入的系统误差为5.95 μrad。
光学系统的设计与装调温度均为20 ℃,当使用环境温度变化时,由于光学元件及光机结构的热胀冷缩效应,会带来收发光轴失配,对收发光学系统进行有限元仿真分析,图6 为收发光学系统在±3 ℃温差下的位移云图。

图6 光机结构温度形变仿真Fig.6 System radiative thermal model
利用SigFit 软件对光纤阵列端面进行多项式面型拟合计算,得到光纤阵列端面刚体位移见表1。

表1 收发光纤阵列端面位移变化Table 1 Distortion of fiber array
由上述热仿真可得,当环境温度变化±3 ℃时,收发光轴变化±18.7 μrad。
综合以上分析,由式(6)计算可得,系统在工作温度范围内总的收发失配为20.78 μrad,满足本系统所需收发匹配精度要求。
3 试验验证与分析
根据上述收发匹配原理、方法与精度分配,系统的光学装调及收发光轴匹配共分为六个步骤,具体步骤如下:
第一步:利用高精度电子测高尺与修磨垫片的方式,完成扩束镜头、接收望远镜镜头、4 个双远心镜头的光学镜片与结构装配,确保镜头每片镜片满足装调公差。
第二步:将光纤激光器输出光纤固定于高精度六维调整机构(PI)上,将经扩束、DOE 分光后的激光射入平行光管,并在平行光管焦面处放置光斑分析仪,通过PI 调整发射光纤与激光扩束镜入瞳处的位置,调节光斑分析仪上光斑直径、相邻光斑间距与设计值一致,通过顶丝与胶结固定发射光纤,完成光纤激光器与扩束镜头、DOE 间装调。
第三步:将16×4 端光纤阵列置于PI 上,同时通过光纤从望远镜焦面反照激光,经望远镜后进入平行光管,并在平行光管焦面处放置光斑分析仪,通过PI 调整16×4 端光纤阵列的位置、俯仰角度与横滚角度,调节光斑分析仪上光斑直径、相邻光斑间距与设计值一致。完成望远镜与阵列光纤16×4 端装调。
第四步:发射光学系统和接收光学系统同时向平行光管发射激光,收发光学系统通过大刚度一体化连接件保证相对位置不发生变换,通过修磨垫片的方式将发射形成的光斑与接收系统形成的光斑调整至光斑分析仪整体视场内,通过PI 微调望远镜像面处光纤的方位和俯仰方向实现望远镜视场脚点的移动,使发射光斑与接收光斑对应位置一一匹配,两个光斑中心距即为收发匹配误差,胶结固化相应结构完成装调。
第五步:将双远心镜头置于调试工装上,阵列光纤4×4 端通过固定工装固定于PI,将光斑分析仪置于双远心镜头像方焦平面处,通过PI 调整,使光斑分析仪上测得的4×4 阵列信号与设计值一致,通过胶结固定双远心镜头与阵列光纤,完成双远心镜头与光纤阵列装调。
第六步:断开阵列光纤4×4 端4 个角的光纤,向单根光纤输入激光,通过往双远心镜头光纤阵列端入射激光,由高速示波器统计光子脉冲个数,通过PI 调节双远心镜头位置与角度,使得对应像元计数率最大,相邻通道与无光时暗噪声统计值一致,判断其完全对准。胶结固定后完成双远心镜头与单光子探测器装调。
上述过程得到主要结果如图7~图10 所示,激光收发匹配装调结果见表2。

表2 激光收发匹配装调结果Table 2 Results of divergence angle and beam angle

图7 波束发散角与间隔角测试结果Fig.7 Testing results of divergence angle and beam angle
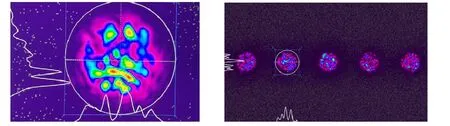
图8 望远镜波束接收视场与视场间隔角测试结果Fig.8 Testing result of telescope FOV and FOV included angle

图9 双远心镜头光斑分布测试结果图Fig.9 Results of the light-spots distribution and size of double telecentric lens

图10 收发匹配装调结果Fig.10 Results of LiDAR alignment
考虑到本系统为64 波束二维倾斜阵列,本文列出了有代表性的四个角的波束匹配误差测试结果,见表3。
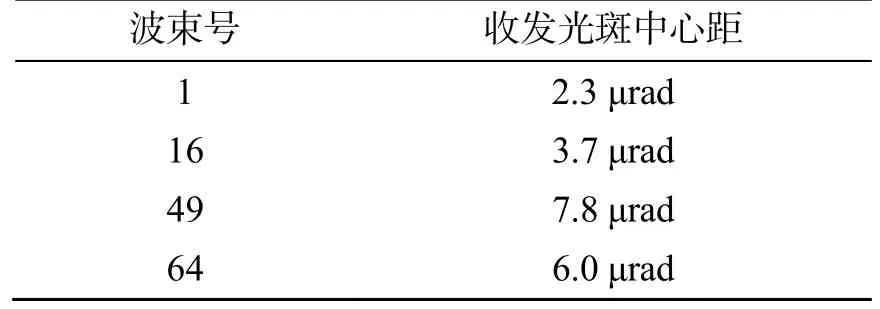
表3 激光收发匹配误差Table 3 Dis-alignments of divergence angle and beam angle alignment
由上述测试结果可知,第一行1、16 波束误差较小,分别为2.3 μrad、3.7 μrad,第四行49、64 波束收发匹配误差相对较大,分别为7.8 μrad、6.0 μrad,其余波束误差都在7 μrad 以内,主要原因为装调过程中以第一行光束为基准,后续各行光束由于加工误差等积累,造成误差逐渐增加,但都在误差分配的10 μrad 以内,满足系统使用要求。
4 结束语
本文提出了一种多波束激光雷达收发波束匹配方法,系统分析了多波束收发匹配过程中的误差来源以及与系统参数设计之间的关系,设计了64 波束二维倾斜阵列光学收发系统并实现了收发匹配。同时,本文仿真分析了环境温度变化时,由于光学元件及光机结构的热胀冷缩效应带来的收发光轴失配问题。仿真与测试结果表明,该方法实现了64 波束优于10 μrad 的装调误差,系统在20±3 ℃的温度范围内,收发失配为18.7 μrad,在工作温度范围内总的收发失配为20.78 μrad,满足本系统设计时25.5 μrad 的收发匹配裕量,本方法具有良好的工程可行性与应用前景。
