基于基线长度加权的GNSS 多天线姿态测量方法*
2022-06-03韦永僧贺凯飞刘笃学杨金权
韦永僧,贺凯飞,刘笃学,杨金权
(中国石油大学(华东)海洋与空间信息学院 青岛 266580)
引 言
采用全球导航卫星系统GNSS(Global Navigation Satellite System)获取载体姿态信息的方法具有易于安装、操作简便、成本低廉、精度恒定等一系列优点,已在远海科学研究、空中摄影测量、陆地导航定位及地震学研究等众多领域中广泛应用[1-4]。根据姿态测量原理的不同,GNSS 姿态测量方法可以分为单天线姿态测量和多天线姿态测量,前者主要通过载体的速度及其加速度来获得载体姿态信息[5-9],后者主要通过解算基线矢量来获取载体姿态信息[10]。与GNSS 单天线姿态测量方法相比,GNSS 多天线姿态测量方法可以提供稳定的输出结果,不受测量载体的运动状态的制约,并且可以灵活地应用于各种各样的测量载体上,具有广泛的应用前景。GNSS 多天线姿态测量可以概括为:求解同一基线在载体坐标系和当地水平坐标系间的旋转关系。要获得载体平台的三维姿态信息,需要在载体上安置三根以上的GNSS 天线,并构成两条以上的非共线基线。
本文主要介绍了最小二乘姿态估计法的基本原理。由最小二乘法的原理可知,由于最小二乘姿态估计法未考虑基线间相对关系的问题,若基线长度差异显著而赋予相同的权值将会导致载体的姿态测量精度受到一定的影响[11],因此提出了一种基于基线加权的GNSS 多天线姿态测量方法。该方法考虑到基线长度及其权值与基线解算精度的关系,对长度不同的基线赋予不同的权值,再使用最小二乘迭代法进行姿态测量。同时,为验证该加权最小二乘法用于姿态测量在精度提高方面的可行性,通过船载实验数据进行了等权最小二乘法与加权最小二乘法的解算结果的对比。
1 最小二乘姿态估计法基本原理
与GNSS 多天线姿态测量方法相比,GNSS 单天线姿态测量方法的基本原理简单,不需要对载波相位的整周模糊度进行解算[12-14],同时对于载体平台的形状、大小的要求相对不高,不需要增加额外的天线即可完成载体的姿态测量,可进一步控制测量仪器成本。但该方法也存在一定的缺陷,由于只能用到两条基线信息,因此当基线数大于两条时,就无法利用冗余基线获得最优结果,从而影响姿态角的测量精度。因此针对此情况,通常采用GNSS 多天线姿态测量方法进行载体姿态角信息的测量。
在GNSS 多天线姿态测量中,最为常用的方法包括直接解算法与最小二乘法。其中,直接解算法可以在只知道两条基线在当地水平坐标系中向量信息的有限条件下,求解出测量载体的三维姿态信息。基线矢量在不同坐标系间的转换关系为:

由上可知,在直接解算法中,没有考虑基线在载体坐标系和当地水平坐标系中所包含的各类误差。但在实际应用中,由于人为原因和仪器原因等一系列因素的影响,基线在载体坐标系中的坐标矢量不能精确测出,因此认为事先测定的基线在载体坐标系中存在误差。同时,由GNSS 多天线姿态测量方法所解算出的基线在当地水平坐标系中也存在误差,将两个误差带入式(1)中可以得到:

对于式(2),目前通常采用最小二乘估计算法来对其进行求解[3]。利用欧拉角来表示旋转矩阵,可以得到式(2)关于欧拉角的观测方程为:

可以看出,式(3)中的观测方程为非线性方程,因此,首先需要对该观测方程进行线性化处理。
式(4)给出了每条基线的非线性方程:

该模型为标准的隐式最小二乘校正模型,假设姿态角初值为e0=[y0p0r0],将式(5)中的方程在初始值位置展开,进行线性化可得:

式中,Mi表示设计矩阵,[ΔyΔpΔr]T表示姿态角改正数。
假设各基线间没有相关性,由式(4)可以得到误差欧拉角的最小二乘解为:

采用最小二乘法进行姿态参数的解算,其步骤简要概括如下:
①设置三个欧拉姿态角的初值e0(可以通过直接解算法获得),通过初值计算出初始旋转矩阵0R、设计矩阵Mi以及观测向量Wi(其中i=1,2,…,m表示基线数量);
② 根据式(7)计算出三个欧拉姿态角的改正数Δe=[ΔyΔpΔr];
③将步骤②计算得到的改正数与步骤①中的初始值相加对初值进行更新,并重复步骤①、步骤②,直至e0收敛。
2 基线长度加权的最小二乘估计原理
最小二乘法虽然考虑了基线在载体坐标系和天线坐标系中的误差,但是忽略了每条基线之间的相对关系,即认为每条基线是相互独立的。此外,由于在测量过程中采用的观测手段一致,通常从计算过程简化的角度出发,将各基线的权值视为相等的,即赋予各条基线相同的权值后进行解算。在基线长度差距不明显的条件下,由等权最小二乘法所解算的姿态角精度不会受到较大影响。然而在实际应用中,利用GNSS 多天线姿态测量方法进行姿态角的测量时,基线的长度、载体平台的运动状态、各条基线之间构成的角度以及基线与载体坐标系各个轴向之间的夹角等一系列因素都会对姿态测量的精度产生影响[15-17]。目前的研究结果表明,随着基线长度的增加,基线的解算精度随之提高,进而有利于提高姿态角的解算精度。
本文采用基线长度作为权值,则式(7)可以表示为:

3 实验设计及结果分析
为了验证基线加权的GNSS 多天线姿态测量性能,设计了船载动态实验,实验数据采用实验船停靠在码头时(5 min)的数据,总计300 个历元。首先采用载波相位观测值获取载体平台上的天线相对位置矢量信息[18-20],再通过最小二乘姿态估计方法以及基于基线加权的最小二乘姿态估计方法,分别解算载体平台的姿态信息。
船载姿态测量实验于2020 年9 月26 日在威海市葡萄滩附近的海域展开,本次实验采用了4 台GNSS接收机,接收机的采样率设置为1 Hz。其中两台接收机的型号为中海达iRTK2(分别设置为从天线2 与从天线3),另外两台接收机型号分别为Septentrio PolaRx5(设置为主天线)和Trimble NetR9(设置为从天线1),天线的布设如图1 所示。其中,主天线到从天线1 的距离为2.46 m,主天线到从天线2 的距离为0.89 m,主天线到从天线3 的距离为2.59 m,使得各条基线的长度存在较大差异。此外,实验船只上配备了高精度惯性导航设备,安置在船头的位置,将其输出的姿态角结果作为参考真值,将等权最小二乘法与加权最小二乘法所解算出的姿态角信息与其进行对比分析,从而验证加权最小二乘法的姿态测量性能。

图1 船载GNSS 天线及INS 布设图Fig.1 Layout diagram of shipboard GNSS antenna and INS
当实验船停靠在码头时,实验船的姿态角变化平缓,且不存在较大的波动,有利于后期的解算。将所获取的实验数据分别采用等权最小二乘法和加权最小二乘法进行姿态角解算,解算出的航向角、俯仰角、横滚角信息分别如图2、图3 和图4 所示。

图2 航向角变化Fig.2 The estimate of yaw angle
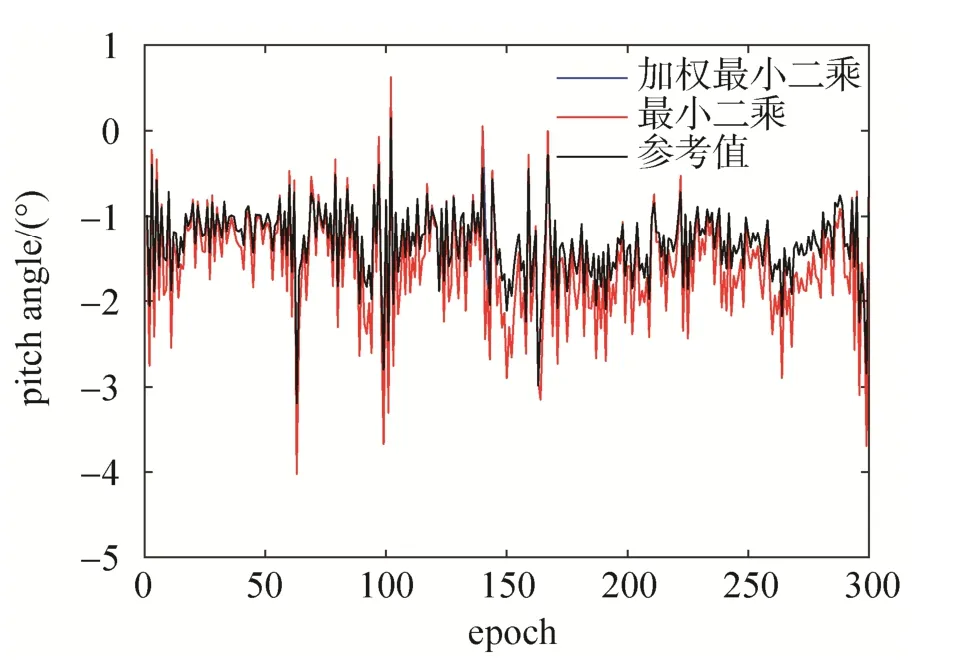
图3 俯仰角变化Fig.3 The estimate of pitch angle
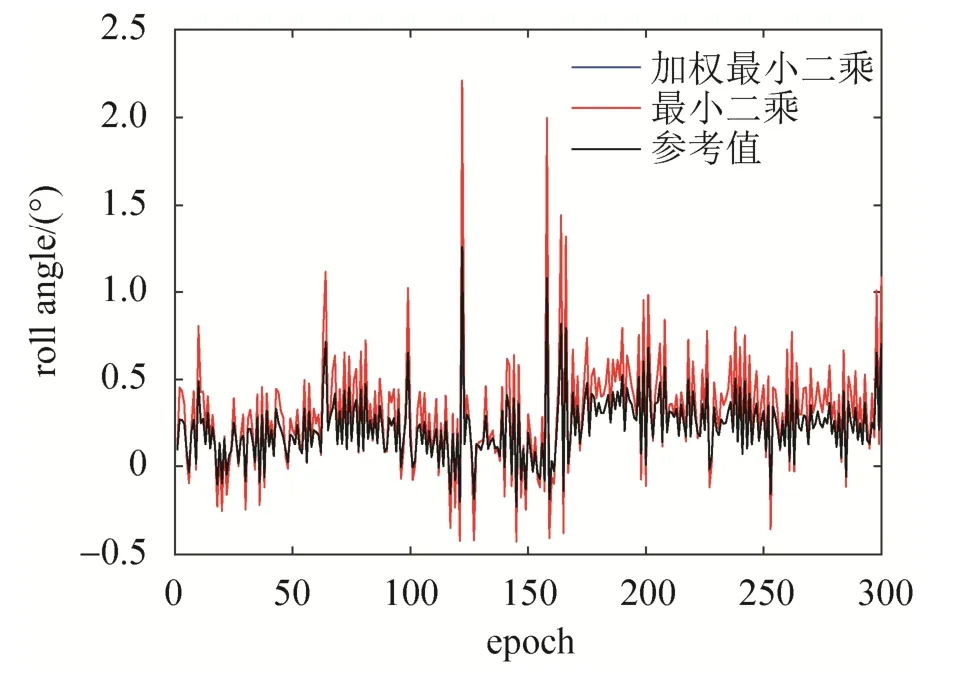
图4 横滚角变化Fig.4 The estimate of roll angle
图2~图4 分别给出了采用等权最小二乘法与加权最小二乘法所解算的姿态角信息随时间的变化关系。将其与高精度惯导设备所输出的姿态角信息作为真值进行比较。实际上,由于实验船只的排水量较小,即使停靠在港口时也会受到海面起伏的影响,而且由于实验船只的后半部分较重,使得实验船只的俯仰角不为零。由图2 可知,由高精度惯导设备所测得的航向角的变化范围为[140°,142.5°],俯仰角的变化范围为[-3.2°,0.2°],横滚角的变化范围为[-0.2°,1.5°]。由图2 至图4 可知,测量误差随着姿态角变化的增大而增大。将解算出的航向角、俯仰角以及横滚角信息与参考值相比较得到的残差分别如图5 和图6 所示。
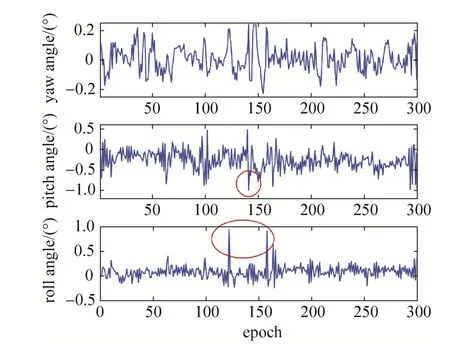
图5 等权最小二乘法计算的航向角、俯仰角、横滚角误差Fig.5 Error of yaw,pitch and roll calculated by least squares estimation method

图6 加权最小二乘估计法计算的航向角、俯仰角、横滚角误差Fig.6 Error of yaw,pitch and roll calculated by weighted least squares estimation method
由图5 与图6 可以看出,与等权最小二乘法相比,加权最小二乘法可以有效抑制俯仰角和横滚角中的部分误差(图5 中红色圆圈部分)。
为进一步验证新方法在姿态角测量方面的误差抑制作用,对两种方法的解算姿态的精度进行分析对比,统计结果见表1。

表1 不同解算方法计算姿态角的残差统计结果Table 1 Statistic results of attitude angles calculated by different solutions
由表1 可知,与高精度惯导设备所输出的航向角、俯仰角、横滚角信息相比,采用等权最小二乘法的误差值标准差分别为0.087 5°、0.239 3°和0.138 7°;而采用加权最小二乘法的误差标准差分别为0.087 1°、0.236 4°和0.120 6°。
以姿态角的误差标准差作为精度参考,加权最小二乘法解算出的航向角和俯仰角精度与等权最小二乘法基本一致,而横滚角的精度提高了13 %。由于实验中采用了三条不同长度的基线,基于基线长度加权削弱了短基线高权值现象对解算结果的影响,从而使得载体姿态角的解算精度有所提高。
4 结束语
与常规的GNSS 多天线姿态测量方法相比,基于基线长度加权的GNSS 多天线姿态测量由于考虑到了基线权值的影响,改善了因基线长度差异显著影响的基线解算精度的现象,提升了载体姿态的测量精度。在船载动态实验中,当基线长度的差异显著时,采用加权最小二乘法所解算的载体航向角、俯仰角以及横滚角的精度有了一定的提高,尤其以横滚角的精度提升最为明显。
