基于虚拟现实技术的3D 图像重建方法
2022-06-01毕军涛
毕军涛
(青岛酒店管理职业技术学院 山东 青岛 266100)
0 引言
当前,在图像重建领域当中,针对多维度的图像重建已经成为该领域重点研究内容,3D 图像重建技术的发展将会推动其他多个领域的进步,如计算机动画、医学图像处理等。三维重建是指对三维物体建立适合计算机表示和处理的数学模型,是在计算机环境下对其进行处理、操作和分析其性质的基础,也是在计算机中建立表达客观世界的虚拟现实的关键技术。当前针对图像的立体重建主要是通过3D 扫描实现,在重建的过程中需要进行大量的复杂测算,并运用测算得到的三维点云数据重建构建3D 图像。这种方法不仅操作复杂、计算量大,并且结果可能无法达到预期[1]。随着这项技术的成熟运用,当前已经能够实现对图像明暗形状的恢复和对立体视觉的重建。但由于技术仍然存在不足,在操作过程中极容易受到操作手法上的限制,无法实现对更复杂场景图像的重建。因此,针对这一问题,尝试引入虚拟现实技术[2]。虚拟现实技术是计算机技术逐渐演化产生的全新技术,利用该项技术能够实现对场景的模拟,并通过从多个途径获取到的信息融合,实现对交互式三维动态场景的展现,以此达到仿真的效果。虚拟现实技术具有沉浸性、交互性、多感知性、构想性等诸多优点,因此在实际应用中,虚拟现实技术能够实现三维图像生成,进行动态环境建模,在现有3D 图像重建技术的基础上,应用虚拟现实技术,探究一种全新的图像重建方法。
1 3D图像重建方法
1.1 基于虚拟现实技术确定图像最小识别距离
在对3D 图像进行重建时,其重建效果主要受到各个帧点的像素分辨率影响,分辨率越低,则重建图像当中现实的内容越不清晰,包含信息要素更单一;反之,分辨率越高,则重建图像中显示的内容越清晰,包含信息要素更丰富[3]。基于这一特点,为了提升重建后3D 图像的质量,需要充分考虑到图像分辨率限制的问题。由于图像分辨率受到图像识别距离的影响,因此,在引入虚拟现实技术的基础上,确定像素识别的最小距离。在光学原理的支撑下,将通过专业摄像机扫描得到的图像目标点看作一个光源结构。在两个光源结构之间,通常会形成一个或多个艾里斑。若其中一个艾里斑的中心与另一个艾里斑的边缘重叠,则说明此时两个艾里斑之间存在着最大识别距离[4]。根据上述论述特征,将其以表达式的方式展现,得到公式(1):
公式(1)中,δ表示两个艾里斑之间直线连接的最大距离;l表示实景图像与专业摄像机之间的实际直线距离;λ表示图像点光源在进入到专业摄像机当中的实际波长;D表示光源通过的路线直径大小。从上述公式(1)中可以看出,随着波长不断增加,专业摄像机光学结构中可识别的最大距离会随之增加,导致图像分辨率降低,使得图像出现降质现象;反之波长不断减小,专业摄像机光学结构部分能够识别到的最大距离会逐渐缩小,进而使得图像的分辨率增加,达到提升图像重建质量的目的[5]。在明确这一特点后,图像探测装置的识别最小目标也是影响图像分辨率的影响因素之一。真实场景当中的画面信息能够通过虚拟现实技术被图像探测装置接收并转换为电信号[6]。通过上述分析得出,场景图像探测装置的分辨率通常为定值,并且该数值一般会超过场景中其他光学衍射的分辨率。因此,基于这一特点,通过选择本身分辨率较高的图像探测装置,能够达到提升重建后图像质量的效果。按照上述公式(1)确定图像的最小识别距离能够保证后续3D 图像重建的分辨率。
1.2 计算3D 图像重建点坐标
在对实景事物进行3D 图像重建时,引入虚拟现实技术,对实景进行全方位扫描,确定实景图像当中各个帧点坐标。在测定后,基于参数转换标准对实景数据进行处理,
并得到各个重建点在三维空间中的坐标。在重建前,选定一个图像点作为三维空间原始坐标的原点。通常情况下,原点应选择与3 个方向坐标轴距离相似的位置。在确定原点后,找出所有实景图像坐标点与其对应的虚拟图像坐标点映射。将两种图像融合到一个相同的坐标系当中。为了方便重建,将实景图像看作是虚拟图像通过旋转得到的矩阵。将这一矩阵与实景图像进行比较,其相互之间产生的平移量设置为t。利用虚拟值对重建3D 图像进行描述,则虚拟值的表达式为:
公式(2)中,q表示为用于描述3D 图像的虚拟值;w表示为虚拟值的横轴坐标;x表示为坐标系中水平方向坐标数值;y表示为坐标系中垂直方向坐标数值;z表示为坐标系中的空间方向坐标数值。根据虚拟值,得出实景图像转换为重建3D 图像的矩阵,其表达式为:
公式(3)中,p表示为实景图像转换为重建3D 图像的矩阵表达式;mp表示为参数量转换为重建3D 图像的矩阵函数;Θ 表示为参数量;K表示为矩阵定标。根据上述公式,计算得出虚拟3D 图像在坐标系当中的坐标,并生成3D 图像重建模型[7]。但在实际重建过程中,提取实景图像当中的特征会产生大量的噪音,造成提取后各个帧点坐标不正确,严重影响重建效果。因此针对这一问题,设置在实景图像当中,各个参数的转换需要符合基本矩阵函数,使其等式成立后,才能够确定各个帧点的坐标。
1.3 测算3D 图像重建深度距离
按照本文上述内容,确定重建3D 图像各个帧点在坐标系当中的坐标后,还需要确定3D 图像重建后的深度距离,并在确保每个帧点深度距离均相同的情况下,才能够保证重建后3D 图像的均匀性[8]。假设实景图像中某一帧点与对应重建后3D 图像中帧点之间的距离为d,中心点为f,则各个帧点的深度距离可用如下公式表示:
公式(4)中,de表示横轴坐标、纵轴坐标或空间坐标上3D 图像重建深度距离;e表示在实景图像当中某一已知的坐标点;R表示3D 图像虚拟坐标。当de为横轴坐标上3D 图像重建深度距离时,则此时R的取值为实景图像中已知坐标点的空间坐标数值。当de为纵轴坐标上3D图像重建深度距离时,则此时R的取值为实景图像中已知坐标点的纵坐标数值。当de为空间坐标上3D 图像重建深度距离时,则此时R的取值为实景图像中已知坐标点横轴坐标与纵轴坐标差值。根据上述公式(4)完成对3D图像重建深度距离的测算,以此确定经过3D 重建处理后,各个帧点之间的正确位置。在重建过程中,按照公式(4)得出实际距离后,将该数值作为标准,进行对各个帧点的连接,并通过多个帧点的连接形成一个虚拟平面图像。为了体现重建后图像的立体感,还需要对虚拟平面图像中各个帧点之间的实际深度进行计算,其计算公式为:
公式(5)中,T表示为虚拟平面图像中各个帧点之间的实际深度。按照公式(5)中内容,测算得出虚拟平面图形中各个帧点对应的图像深度数值,并形成具有相同深度的立体图像。综合上述论述内容,完成对实景图像的3D 重建,生成一个具有立体感的三维立体画面。
1.4 背景图像与前景图像匹配与重建
引入高斯分布,按照相同权重比例,实现对图像前景和图像背景的量化描述。利用{M1,M2,M3,……Mn}作为图像中各个帧点时间域上变化规律的表达,针对随机一个帧点都应当满足上述图像前景与背景比例关系。在重建过程中,首先需要完成对实景图像的扫描,并确定投影的空间坐标。针对扫描得到的结果进行参数化处理,并针对投影的空间坐标进行矢量化处理[9]。将上述经过处理后的数据作为依据,对实景图像属性特征参数进行计算,并将计算结果导入到编辑软件当中进行统一修改。在上述操作基础上,结合虚拟现实技术,将得到的数据导入,并完成3D 图像的重建。在这一过程中,实现高斯正态分布的转化能够在极大程度上降低前景与背景在匹配过程中产生的误差,以此降低背景图像与前景图像的匹配难度[10]。在转换时利用重建图像背景比例对3D 图像中各个帧点的像素灰度进行限制。通常情况下,3D 图像中背景的灰度频率更高,而前景的灰度频率更低。基于这一特征,实现对图像前景和背景的区分。在明确前景和背景后,将其匹配到转换前的3D 图像当中,并对准各个帧点空间坐标,以此完成对实景图像到3D 图像的转换,达到最终的重建目标。
2 对比实验
为了验证这一方法的应用效果,本文选择将新的重建方法与传统基于深度学习的重建方法应用到相同的实验环境当中,针对同一实验对象进行重建。以对比两种方法重建效果的方式,实现对其应用优势的对比与分析。在实验过程中,选择将某一住宅小区中某一民居环境作为实验场景,在该场景中,利用两种重建方法,实现对实景在虚拟场景当中的立体展现。首先,对两种重建方法对图像中帧点跟踪能力进行评价和对比。将该民居环境多角度拍摄到的图像作为资料,并利用3D 激光扫描技术对图像进行全方位扫描,提取扫描结果当中的6 个帧点,将其作为跟踪对象,分别利用两种重建方法对其进行关键点跟踪。在对帧点进行选择时需要确保每个帧点的关键特征类型均不相同,并在此基础上,确定各个帧点当中的像素点总量,6 个帧点的编号分别为Z01、Z02、Z033、Z04、Z05、Z06,各个帧点对应的像素点总量为:40 个、25 个、20 个、60 个、15 个、30 个。记录两种重建方法在对各个帧点跟踪阶段成功数量以及跟踪消耗的时间,并将其记录入表1 所示。
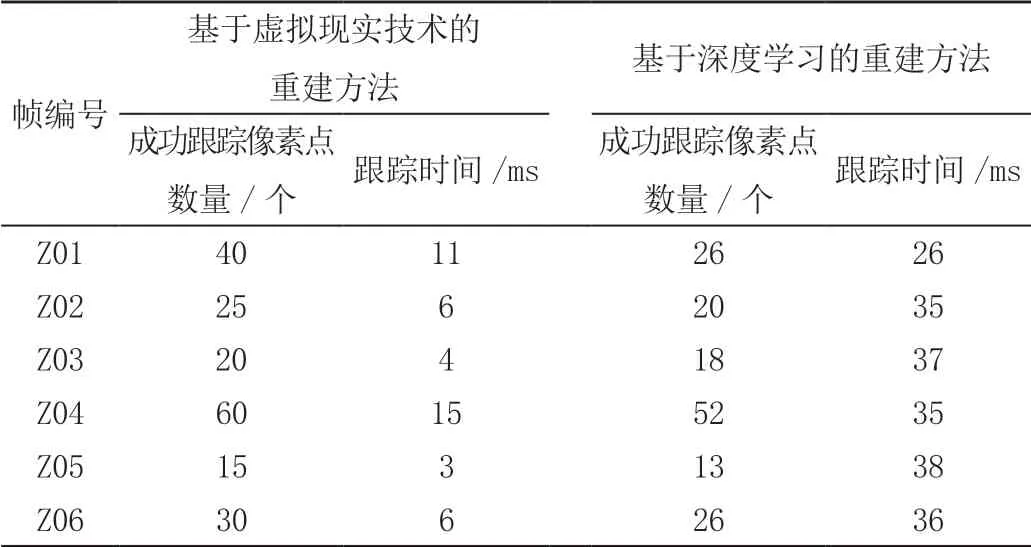
表1 两种图像重建方法帧跟踪能力实验结果记录表
从表1 可以看出,本文设计的重建方法无论是在成功跟踪像素段数量还是在跟踪效率上都具有明显优势,实现对其帧跟踪能力的初步验证。
针对两种方法重建后的3D 图像,利用OpenCV 完成对其分辨率的测定,并将测定结果绘制成表2 所示。
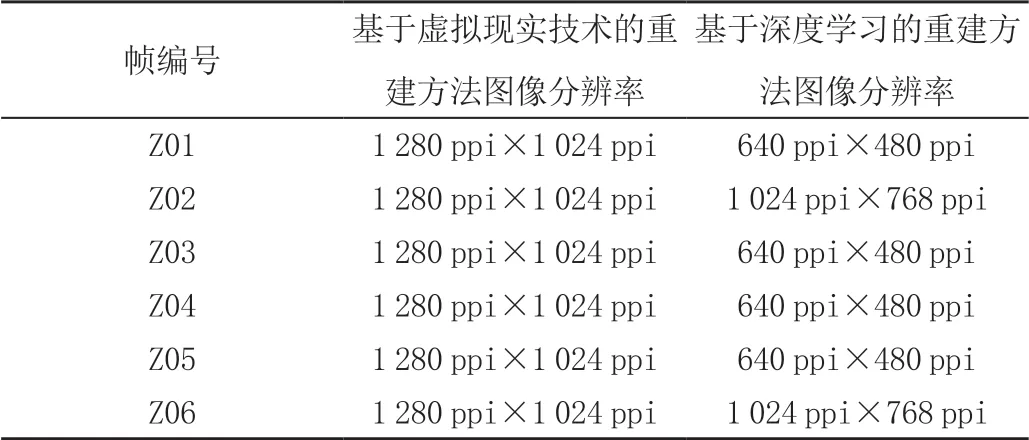
表2 两种重建方法重建图像分辨率测定结果记录表
从表2 中记录的实验数据可以看出,利用本文提出的重建方法得到的3D 图像分辨率均为1 280 ppi×1 024 ppi,超过了原始图像的分辨率,而基于深度学习的重建方法除了Z02和Z06帧点的分辨率与原始重建方法分辨率相同外,其他帧点的分辨率均小于原始图像,不符合图像重建的要求。因此,通过上述得出的实验结果进一步证明,本文提出的重建方法在实际应用中能够有效提高重建图像的分辨率,实现对图像内容更加清晰地展现。
3 结语
当前工业技术的发展逐渐成熟,在数控领域、测绘领域等众多领域当中都对3D 图像的重建技术提出了更高要求。在这样的背景下,本文通过合理引入虚拟现实技术,提出了一种全新的图像重建方法,并通过实验的方式证明了新方法的应用优势。在实际应用中,本文重建方法能够有效解决重建累计误差大、图像处理时间长等问题,并且能够实现对图像中各物体更清晰地展现,得到良好的重建效果。在后续的研究中,为了进一步提高该方法的应用适用性,还将引入更多现代化的图像处理技术和虚拟现实技术,对其进行优化,从而使其能够适用于更加复杂的场景结构,实现对其更高分辨率的重建,为社会作出更大贡献。
