复杂分放性测量点优化布置方法研究
2022-06-01王晶龙潘兆义张权明徐祎凡
王晶龙,强 薇,潘兆义,张权明,徐祎凡
(1.西安航天发动机有限公司,西安 710100;2.北京普达迪泰科技有限公司,北京 100083)
1 引 言
目前我国的中大型部件加工精度随着现代化工业的发展需求日益提升,与此同时对于中大型工业部件的加工精度检测也有了更高的要求。对某火箭发动机进行测量检测时,被测物结构较为复杂,测量尺寸较大,且需要将被测物顶面待测点与底部边缘待测点按实际位置统一到同一坐标系下。
使用传统的跟踪仪检测方式,由于只能手持靶球进行单点测量,且靶球安放及转站等过程较为繁琐,因此,采用摄影测量方式对中大型部件进行精密测量是一个更好的选择。摄影测量是通过在被测物表面固定测量标志点作为合作标志物进行的测量,与普通测量靶球不同,测量标志点仅有不到1 mm厚度,而且易于固定。通过对被测物整体拍摄便可重建这些标志点的空间相对位置关系,从而完成对中大型部件所需的精度检测,因此选择摄影测量方式进行测量。
本文研究目的在于,在进行复杂分放性测量点布设过程中,由于工作环境特殊,需要尽量避免在非被测物上布设合作标志,而且由于无多余物需求,在待测物表面需要尽量少的布设测量合作标志。因此需要对此需求进行实际研究,完成不同复杂分放性测量点布设方式的可行性分析。
2 标志识别
在日常测量环境中,对粘贴有摄影测量标志的被测物进行拍摄,所摄得图像是背景影像灰暗,而标志点为高亮清晰的“白斑”,这种背景暗淡而测量点清晰明亮的图像称为“准二值影像”。这种“准二值影像”因此特质,在摄影测量中被广泛使用。
2.1 光学原理
回光反射标志可以在光源照射下呈现明显高亮,主要是由于它是由一层特殊强反光材料构成的,而玻璃微珠就是这种强反光材料的主要原材料,也是其具备强回光性的主要原因,如图1所示。
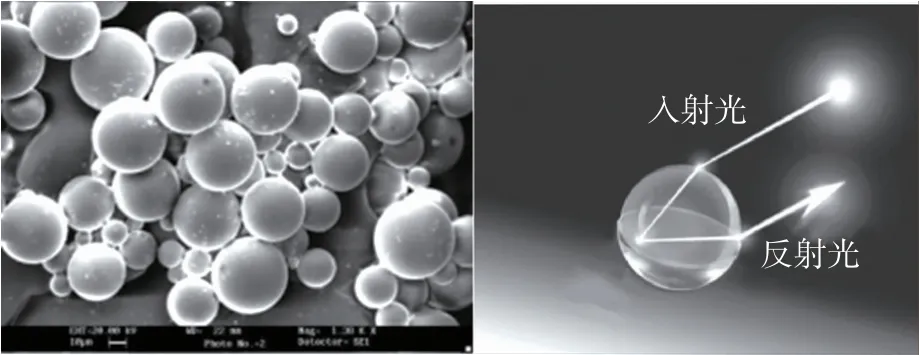
图1 高折射率玻璃微珠Fig.1 High refractive index glass beads
当光源照射在玻璃微珠上时,其光路在理想条件下,会按原路径返回,而玻璃微珠回光性的强弱,主要由其折射率的大小所决定,普通路面上的反光线一般是由1.5折射率的玻璃微珠所制成的涂料涂抹而成,其回光性较为一般,而摄影测量所用玻璃微珠折射率则需要在1.92以上,通过对1.52/1.92/2.0/2.2折射率玻璃微珠进行测试,1.5折射率玻璃微珠回光性较差,而1.92/2.0/2.2折射率玻璃微珠回光性都比较好,没有较为明显差异。但是,由于玻璃微珠的形状不可能完全一致,如图2所示,且不同波长的光有不同的角度偏差,因此反射光不可能与入射光完全平行。
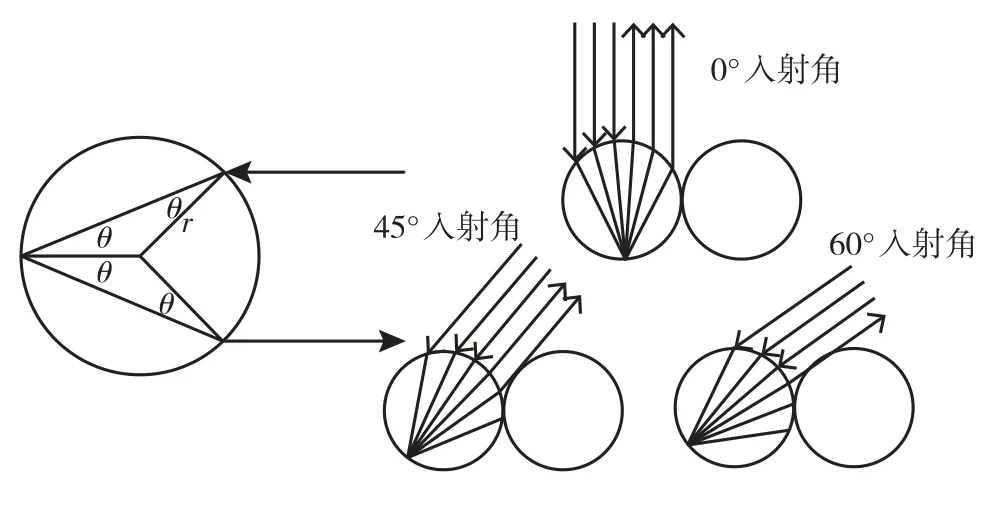
图2 玻璃微珠光线反射图Fig.2 Light reflection diagram of glass beads
布设有回光反射标志的被测物(如汽车及飞机外壳、阵列天线、发动机部件等),仅在普通相机闪光灯的低强度曝光条件下,便可得到标志点与影像背景形成极大亮度差异的测量影像,即“准二值影像”。在摄影测量中可以对这种“准二值影像”在高精度标志图像进行快速、准确而可靠的定位。在这类像片上,目标物自身影像与背景基本“融为一体”,回光反射标志的构像却特别清晰而突出,形成了一个背景暗淡、仅有一群一般呈圆形或椭圆形的亮点。图3为使用回光反射标志产生的“准二值影像”。
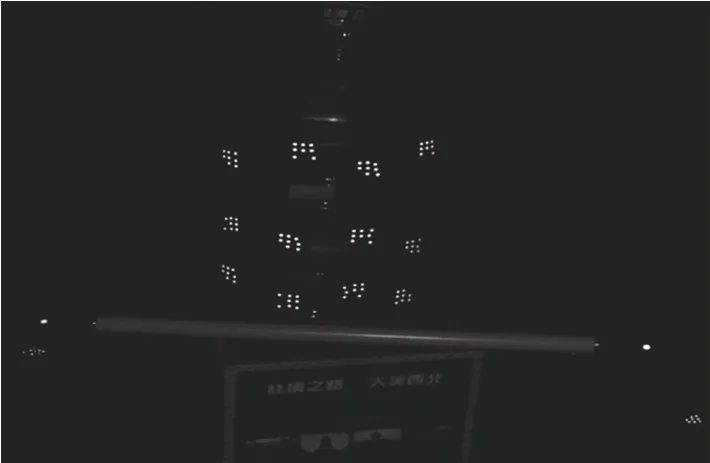
图3 回光反射标志与背景比对图Fig.3 Comparison diagram between backlight reflection mark and background
2.2 识别方式
在工业数字摄影测量中,由于圆形测量标志点分布均匀,从不同方向拍摄畸变规律,且较易定位中心位置,因此常用反光材料制作圆形测量标志点。
在标志点识别过程中,主要是根据相机所摄得影像中灰度值突变确定标志点中心位置。不同学者对于标志点使用的识别算法有所不同,例如,通过边缘提取进行中心定位或通过灰度质心确定标志中心。
2.3 回光性测试
当入射角不同时,由于光学方面影响,其回光性也会有差异。当前测试使用北京普达迪泰科技有限公司生产的量测相机进行拍摄,设备指标如表1所示。
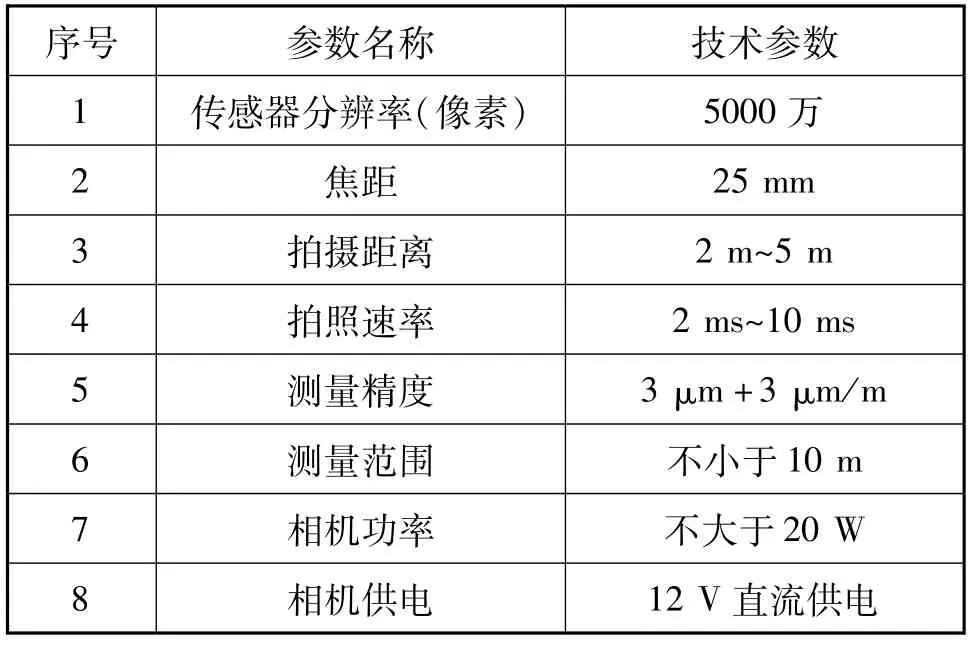
表1 量测相机技术指标Tab.1 Technical index of measuring camera
以下是在开启闪光灯条件下使用量测相机,与标志点所粘贴平面夹角在10°至170°时摄得的灰度值数据,如图4所示。
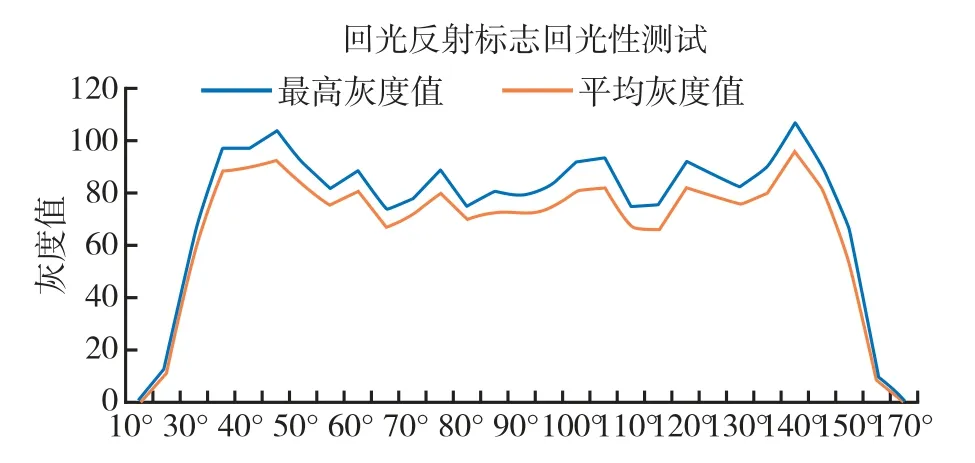
图4 圆形回光反射标志回光性测试数据Fig.4 Test data of circular reflectance sign
测试过程中,所得像片背景灰度值为0或1,由试验数据可得当相机与标志点所成夹角在35°至145°时,标志点的回光性较为良好。
由此可见,测量使用回光反射标志,其整体回光性是极好的,但需要注意的是,当光源与相机的位置与被测物表面夹角小于35°时,其回光性开始大幅下降,但如果将圆度作为考虑因素时,其夹角范围在60°~120°时测量标志圆度较好,这也同样是测量点布设过程中需要考虑的一个重要因素。
3 编码识别
在数字摄影测量中,关键技术之一就是在拍摄的图像中寻找同名像点,对多副图像的同名像点进行匹配。如果被测物上有形状、颜色等易识别的特征,在进行匹配过程中,较易进行识别,从而确定特征点在三维空间中的位置信息,实现测量或三维重构的目的。单纯地依靠回光反射标志,无法解决双相机数字工业摄影测量中立体像点的自动概略定向和同名像点的初始匹配问题,这时就需要引入复杂分放测量点,即编码标志点,如图5所示。
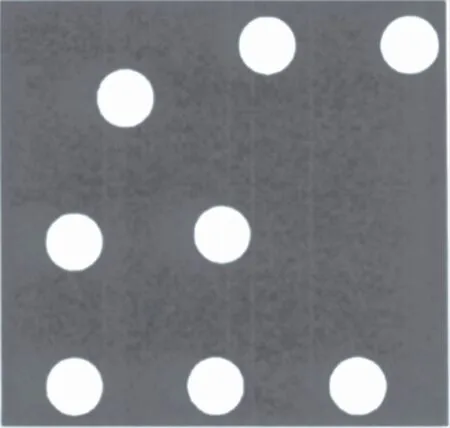
图5 复杂分放测量点Fig.5 Complex release measuring point
在复杂分放性标志点上,有不同位置所布设的8个标志点,各不同布设情况的编码块拥有不同编码值。在进行测量时,将其固定在被测物表面作为公共点,测量其位置后用于不同测量位置的图像进行拼接。
复杂分放性标志点主要是布设在被测物表面具有明显特征的测量标志,是进行图像拼接的同名像点,因此在测量过程中,需要确保复杂分放性标志点不受相机旋转、偏移和缩放的影响,在图像识别过程中,算法可以对编码标志快速稳定识别,提高工作效率,对于大型部件测量,使用的编码数量更是实际测量过程中需要关心的问题。
复杂分放性测量标志的识别原理主要基于中心透视投影原理以及仿射变换原理。中心透视投影的成像过程为,以某点为视点观察被摄物,在视线中放入一个与视线相交的面,被摄物在这个面上所形成的投影即中心投射投影成像,如图6所示。
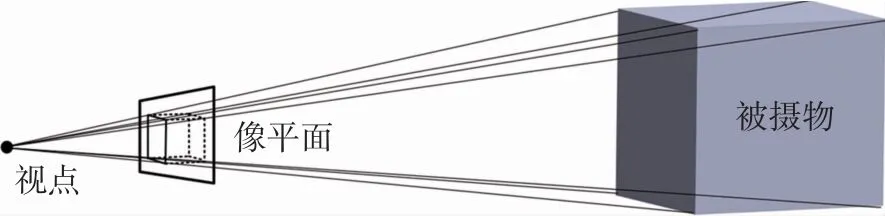
图6 中心投影成像原理图Fig.6 Schematic diagram of central projection imaging
在摄影测量过程中,由于视点相对于被测物位置的变化,被摄物在像平面中的成像也会发生改变。
而在实际运用中,显然难以保证被测物体和摄像机相对距离和方位恒定不变。因此需要对点状编码标志进行识别,根据在图像中提取的点集来实现与模板点之间的匹配,从而实现对编码标志设计坐标系的恢复。编码标志通过摄影成像,在像片中会产生旋转、平移、尺寸缩放、扭曲等仿射变换或透视投影变换。这其中又涉及到计算机视觉中的仿射变换和透视投影变换问题。在设计复杂分放性标志点之初,便会计算出各分放性标志点模板的交比,并匹配对应的编码值,而在识别过程中,首先通过交比不变性找到像片中对应的点集,之后通过仿射变化求出其变换参数。在得到变换参数后,通过对复杂分放性标志点恢复及比对,便可得到对应编码值。在数据处理过程中,可通过匹配这些带有不同编码值的复杂分放性标志点,实现对于各像片的图像匹配,如图7所示。
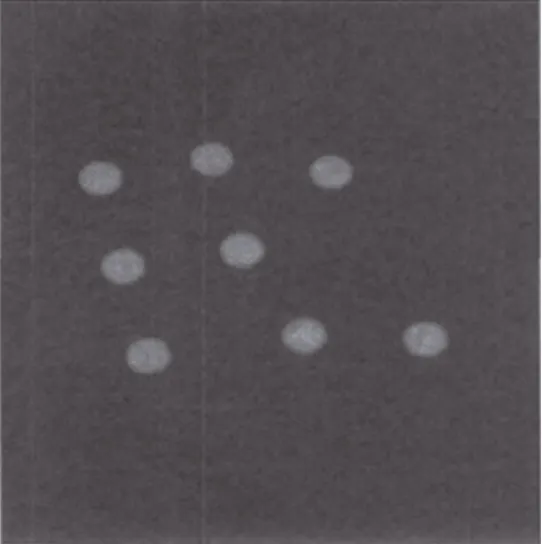
图7 偏转后复杂分放测量点成像图Fig.7 Imaging diagram of complex distribution measuring points after deflection
4 测量点布设
对于大型待测部件,其表面及周围需要均匀布设编码块,原因在于如果将编码块集中于某一区域内时,会加大此区域测量结果对于整体测量结果的权重,导致误差分配不均匀,影响最终的整体测量精度。
对于不同的被测物外形,其布设方式的不同对于测量精度也有相应的影响。为确定不同布设方式对于测量精度的影响,本文设计了三种不同布设方式,如图8所示,分别为(a)仅对被测物粘贴复杂分放标志点,(b)在与被测物夹角在90°左右布设标志点,(c)相对于(b)减少被测物上复杂分放性标志点。
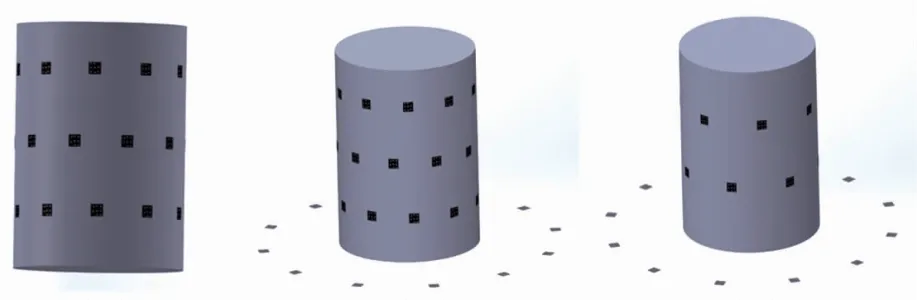
图8 各试验测量点布设示意图Fig.8 Layout diagram of each experimental measuring point
各试验目的如下:
通过试验(a)与试验(b)的试验结果进行测量精度比对,确定仅在类柱状被测物表面布设标志点进行摄影测量工作的可行性。
通过试验(b)与试验(c)的试验结果进行测量精度比对,确定同样在测量辅助面布设复杂分放标志点情况下,在被测物上相应减少复杂分放标志点布设数量,来进行摄影测量工作的可行性。
对于类柱形被测物,如果仅在其周向固定编码标志,则需要密集布设,以满足在单个方向可以拍摄到多个可识别标志点。
除在被测物周向布设测量标志外,可在与柱状被测物轴线垂直的方向布设测量标志,相应减少被测周向测量标志。
5 测量试验
在测量试验过程中,为避免由于拍摄环境以及拍摄位姿的不同对于测量结果的影响,决定在相同限差剔除参数,迭代计算使用同一组照片。通过在初次扫描拼接时禁用对应复杂分放测量点,在测量计算前,将禁用点作为杂点去除的方式,实现对于不同测量点布设方法的测量精度研究。其中测量精度主要依靠RMS(Root Mean Square)值进行精度评估,软件通过后方交会原理及像片公共点拼接,得到当前各待测物空间坐标(x,y,z),之后经最小二乘拟合解算得到当前RMS值。
使用试验所需复杂分放测量点进行图像扫描及拼接,得到初次扫描三维点云数据,如图9所示。
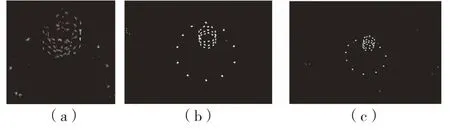
图9 各试验所示初次扫描三维点云数据Fig.9 Each experiment shows that the three-dimensional point cloud data is scanned for the first time
由图9扫描拼接所得三维点云数据可以看到,相同条件下,试验(a)所得点云数据杂点较多,而且有部分影像重叠。试验(b)及试验(c)所得点云数据皆仅有部分杂点。
初次扫描计算所得RMS结果数据如表2所示。
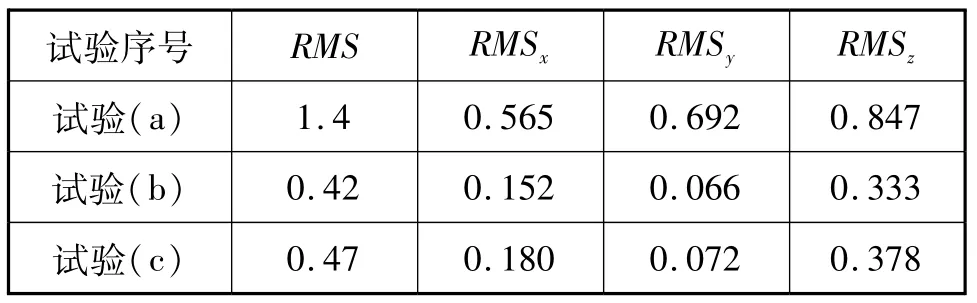
表2 各试验所示初次扫描RMS结果数据Tab.2 Each experiment shows the RMS result data of the first scan mm
由所得结果可以看出,试验(a)仅在被测物上布设测量点进行图像扫描,且拼接精度较差,而试验(b)使用较多复杂分放测量点进行初次解算所得测量精度较高,但在各方向性差值最大仅有0.045 mm。
在完成杂点去除并引入基准尺后,所得点云数据如图10所示。
由图10可以明显看出,试验(a)中,复杂分放测量点发生明显偏移及重叠,试验(b)及试验(c)中的复杂分放标志点较为均匀,其中试验(c)中被测物上测量点较试验(b)中测量点减少了1/2。
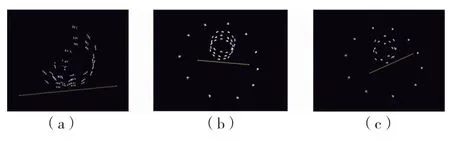
图10 杂点去除及基准尺引入后点云数据Fig.10 Point cloud data after impurity removal and reference ruler introduction
对完成杂点去除及基准尺引入后的点云数据再次进行平差解算后,测量精度结果如表3所示。
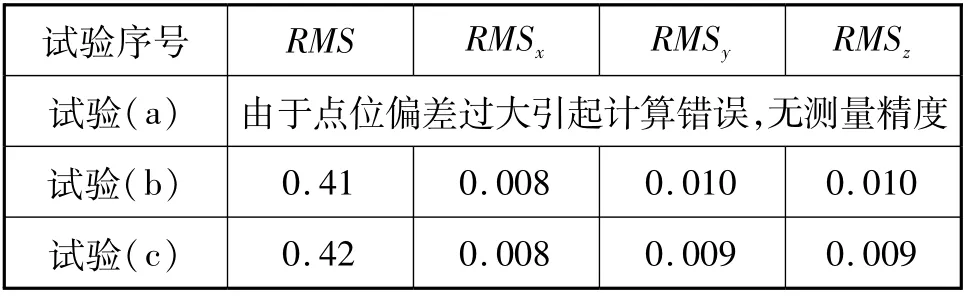
表3 杂点去除及基准尺引入后RMS结果数据Tab.3 RMS result data after impurity removal and reference ruler introduction mm
试验(a)由于复杂分放测量点的点位偏差过大,引起测量计算过程中得到负平方根,无法完成数据解算。
试验(b)与试验(c)测量解算所得各方向测量精度皆在0.01 mm以内,测量精度极高,且其中试验(c)的各方向测量精度稍优于试验(b)。
通过以上测量试验对所设计的三种不同类柱状物布设方式进行试验研究,最终可知,仅使用在类柱状被测物表面布设复杂分放测量点的方式是不可行的,其较难完成图像扫描及拼接工作;而通过增加辅助测量面的方式,对摄影测量的测量精度有质的提升。而且在使用辅助测量面的情况下,相应减少在被测物表面的测量点布设,对整体测量精度的影响极为微小。
6 范围要求
由于标志点回光性对拍摄角度的影响,进行图像拼接的编码块需求,以及测量精度的需要,对于复杂分放性测量点的布设范围也有相应的布设需求。
现场测量过程中,主要根据拍摄角度需求以及现场测量环境,确定测量点布设位置及布设范围。
通过对上述3种布设方式进行试验,确定通过增加辅助测量面的方式可以有效提高测量精度。但是类圆柱与测量辅助面的夹角与被测量范围的关系也是测量点布设方法研究的重要组成部分。
由回光性测试可得,当相机与标志点角度为35°~145°时,标志点在像片中成像清晰,识别率高,当角度在60°~120°时,标志点在影像中的形变较小,中心定位精度较高。
因此根据几何原理可知,被测物与测量辅助面的夹角范围为30°~150°,而且由于相机最小拍摄距离影响,相机仅能测得被测物及辅助面上最大测量角度以外测量点,最小测量角度以内的测量点。如图11所示,以最小1 m拍摄距离为例,当被测物与辅助面达到30°夹角时,30°夹角方向的阴影区域内被测物与测量辅助面上点不可测得,仅可测量被测物及辅助面上2.73 m以外测量点,而大角度方向则可以测得当前60°最小夹角范围内,不大于最大测量范围的任意测量点。
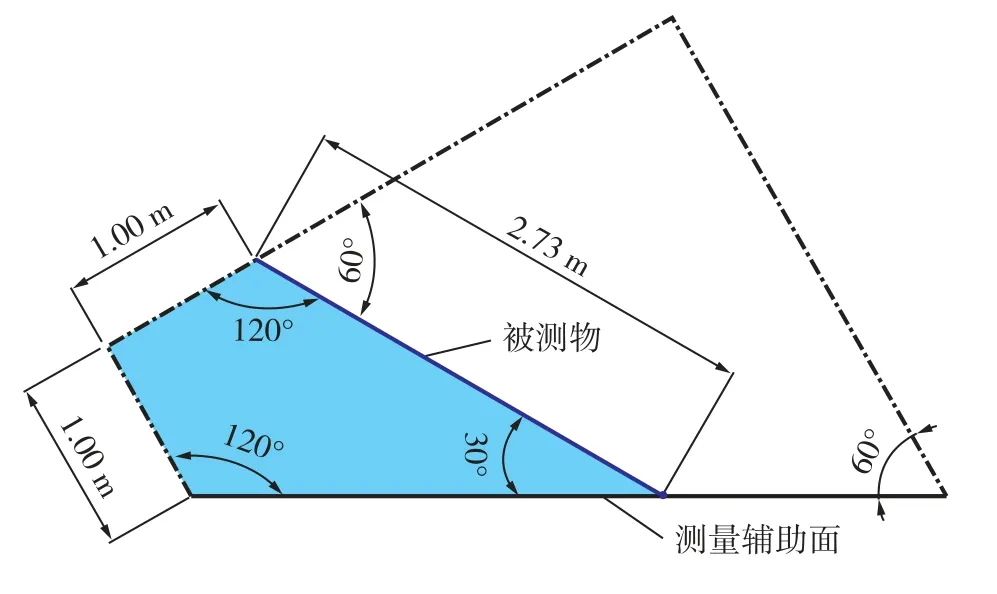
图11 被测物与辅助面30°夹角几何构图Fig.11 Geometric composition of 30°angle between the measured object and the auxiliary surface
7 结束语
在对类柱状待测物进行复杂分放性测量点布设时,尽量不选择仅在被测物表面粘贴测量点的布设方式,而是寻找一测量辅助面布设标志点,通过增加测量辅助面的方式,不仅可以极大提高点云成像结果,而且在本试验中,去除待测物上布设的一半测量点,对整体测量精度没有影响。
此外,对于所选择测量辅助面与类柱状物轴线的夹角范围也进行了一定研究,测量辅助面与类柱状轴线在当前测量环境下的夹角范围为30°~150°,但是在不同角度下,相机的有效测量范围有些许差异,因此在进行测量点布设时,需要在被测物及辅助面上最大测量角度以外、最小测量角度以内进行布设。除此之外,相机有效测量范围还受相机视场角及最大测量距离影响。因此在复杂分放性测量点布设时,也需要在相机视场角以内,以最大测量范围为半径,来进行复杂分放性测量点的布设。
由于像片拼接需求,需要每张像片之间有尽量多的同名像点,来实现测量标志的拼接,因此在测量点布设时,同样需要考虑复杂分放性测量点布设的疏密程度对于摄影测量精度带来的相关影响。
