永磁同步电机转子磁场的检测与可视化
2022-05-31夏一恒刘一鹏
程 鑫,彭 程,夏一恒,刘一鹏
(1.武汉理工大学 机电工程学院,湖北 武汉 430070;2.湖北省磁悬浮工程技术研究中心,湖北 武汉 430070)
转子是永磁同步电机中的关键部件之一,其磁场分布对永磁电机的质量和性能有很大影响。转子制造是永磁无刷电机生产过程中的关键工艺,决定了转子的磁场分布情况[1]。因此检测生产后转子的磁场对保持稳定的电机质量及性能有重要意义。
由于磁场无法被直接观测,因此需要一种能直观展示磁场分布情况的方法。数据可视化旨在用图形化的手段,将数据进行视觉编码,生成符合人类感知的图像,降低数据理解的复杂度[2],可以直观地展示转子磁场分布的情况,是转子磁场数据表达的良好工具。转子磁场数据包含测量点的坐标及磁感应强度4个维度,因此对可视化提出了要求。
文献[3]使用了一种集成的高分辨率二维磁场传感器用于磁场在线检测;文献[4]通过固定传感器阵列和转子低速旋转,实现对转子外圆周磁场的测量。文献[5]使用MLX90393三维磁场传感器,以分层扫描的方法进行磁场可视化检测。对于检测转子磁场质量而言,上述方法使用传感器数量多,读出数据量庞大,系统实现成本高,不适宜用于工业生产环境下对于转子磁场分布的快速测量,在数据展示方面也不够全面和直观;文献[6]对于空间电磁三维态势展示提出了一种基于混合八叉树的数据场分割方法,优化了规则网格体划分时对于经度、纬度、高度方向分割后子空间大小不均匀的问题。对于转子这一适用圆柱坐标的空间,该方法不能直接使用,需要进行优化。
针对上述问题,笔者从优化转子外部空间的划分入手,对可视化所需的数据点进行了重新组织,降低了所需的数据量;设计了针对转子磁场检测的数据采集系统和三维可视化方法,实现了转子空间磁场的有效表达。
1 转子外空间磁场数据的组织
1.1 转子外空间的划分
为了组织转子磁场的数据,需要对转子外的空间进行划分,使每个数据点对应一个细分的子空间,实现对转子空间磁场的表达。
在圆柱坐标系下,分别从方位角、长度、径向距离进行等间隔划分,将转子外部空间划分成如图1(a)所示的若干个子空间。网格中每个坐标的函数值f(r,θ,l)为该子空间的磁感应强度值,其中r,θ,l分别表示径向距离、转角、长度。图1(b)是这种分割方法的数据模型,其中每一个点的数据表示图1(a)中圆柱形空间对应位置的磁感应强度的大小。

图1 圆柱坐标系网格划分
这种划分方法的缺陷在于圆柱网格体中各个单元的体积不均匀,空间的径向距离越大,远离轴心和靠近轴心的子空间体积差距越大。对于数据的可视化而言,可能会出现某些子空间分割过细,超过了像素点的密度,而另一方向上的子空间体积仍然较大,无法实现良好的可视化效果的情况。因此需要对空间的剖分方法进行优化,减小分割后子空间的体积差距,以适应可视化的需要。
对于永磁转子,重点在于展示其圆周方向的磁场分布情况[7],因此该方向上对数据的分辨率要求更高。笔者提出一种针对转子外部空间的划分策略,即首先沿径向和轴向这两个维度进行网格划分,再针对圆柱坐标网格划分不均匀的特点,在径向位置不同的子空间再次沿周向进行划分,越远离转轴的子空间划分密度越大,使分割后各个子空间更加均匀。图2是对整体磁场数据进行划分的示意图。对于每个分割出的子空间,都按照方位角增加、轴向坐标增加、径向距离增加的顺序对其进行编码,使划分后数据模型具有固定的顺序。
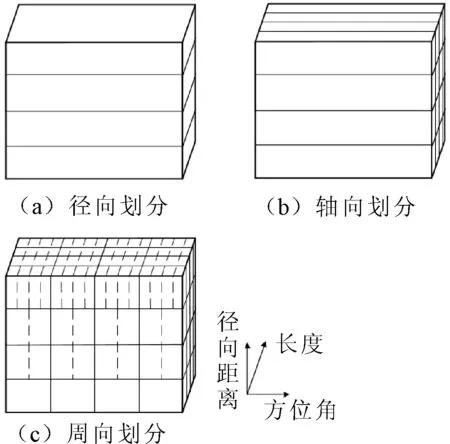
图2 磁场数据分割模型
将划分策略还原到转子外的空间,如图3所示,与图1(a)中完全的网格划分相比,这种策略使数据量显著减少,按该策略划分后的子空间大小和密度都更加的均匀,适合数据可视化这一应用场景。
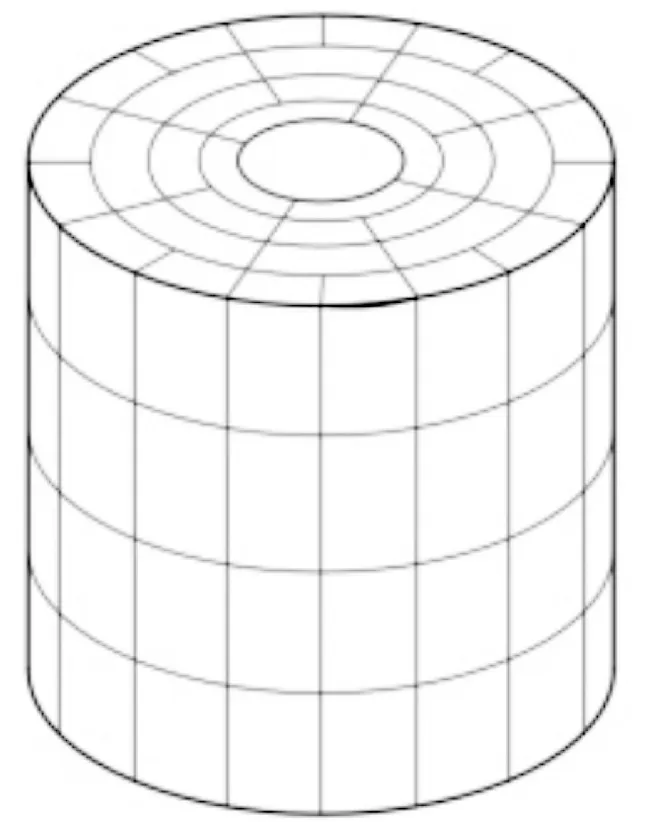
图3 转子磁场均匀分割效果
此外,相对于完整的网格划分,使用这种划分策略进行数据可视化,在保证相似的渲染质量下,所需的数据量显著低于使用完全的网格划分,降低了运算开销和数据传输量。
1.2 空间磁场数据结构的建立
在上述分割策略中,多级子空间之间构成了树形关系,即整个划分过程形成多叉树结构。在该树中所有数据都被包含在最小的子空间中,即树的最末段的节点中。根节点和非叶子节点中均不包含磁场数据,如图4所示。
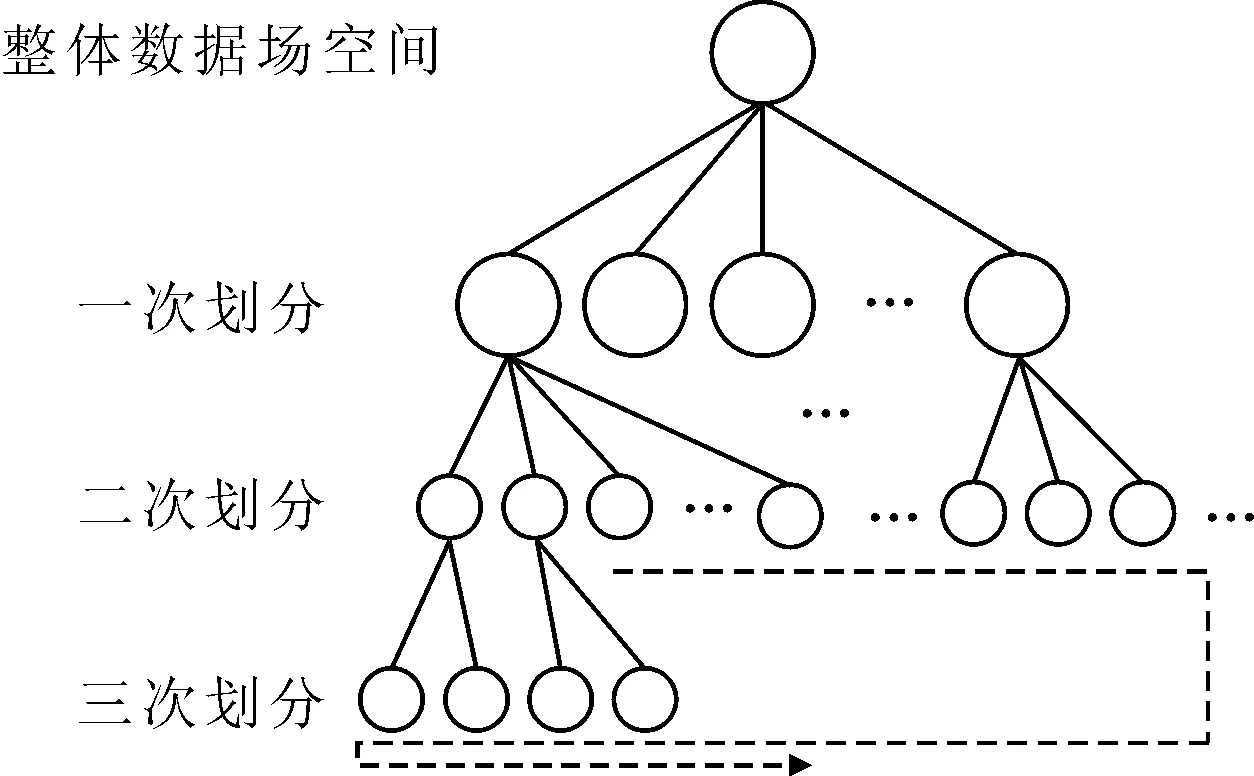
图4 多叉树数据结构
由于子空间的编码方式固定,每个节点的子树的顺序也被固定。广度优先遍历该树,抛弃数据为空的节点,即可将所有的磁场数据按照固定顺序整理到一个线性表中。即按照图4中虚线的顺序,将每行的叶节点相连,如图5所示。

图5 磁场数据线性表
2 转子磁场数据获取
2.1 转子轴向磁场分布情况分析
图6(a)为待检测转子。在Ansys Maxwell 3D软件中建立该转子的模型并进行仿真[8],如图6(b)所示。转子长41.02 mm,外径38.34 mm。在Ansys软件中建立模型时永磁体材料选择NdFe30,铁芯材料选择iron。忽略转轴部分对磁场的影响。
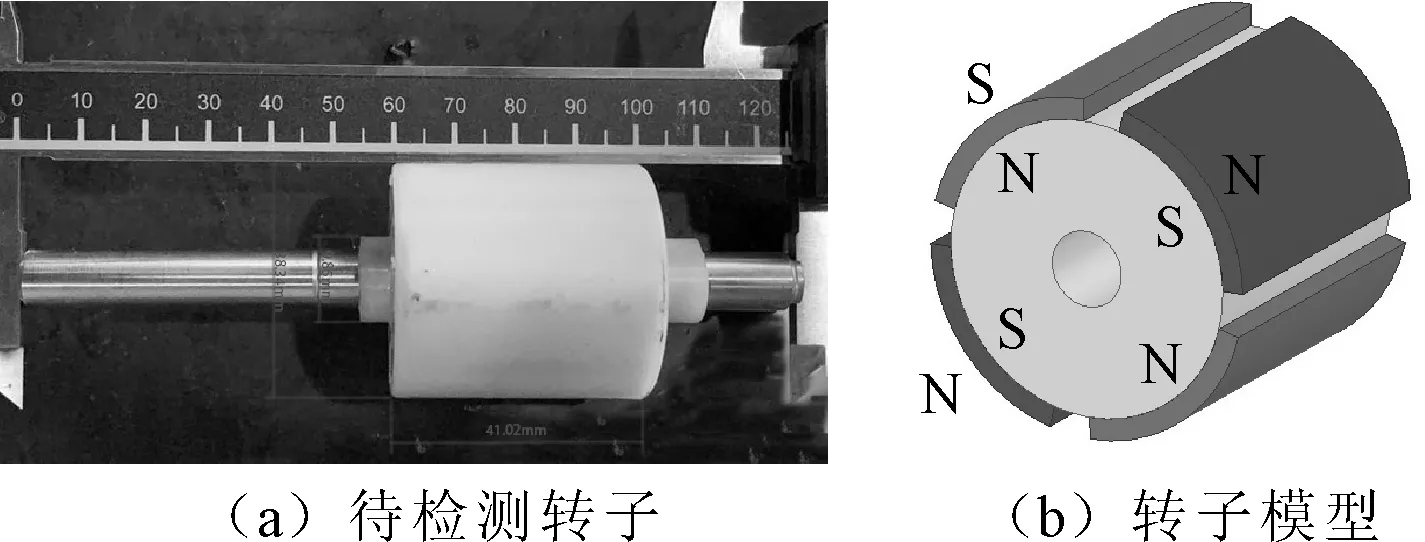
图6 待测转子模型
传感器检测位置如图7(a)所示,检测转子在3个位置磁感应强度轴向分布情况,其中测量点之间的间隔为22.5°。图7(b)中的仿真结果显示了这3个位置转子在转轴方向的磁场分布情况。

图7 不同位置磁感应强度轴向分布
转子模型的几何中心在图7(b)横坐标为50 mm处。3条曲线均显示出中间平缓,两端出现快速下降的趋势。这表示转子轴向中段磁场均匀,磁感应强度变化很小;在接近转子两端的范围磁感应强度陡降。
2.2 磁场测量方法
为了检测转子附近空间的磁场分布情况,选择霍尔传感器,采用传感器固定,转子低速旋转的方式,使传感器与转子表面相对运动,扫描转子的整个圆周面,如图8所示。
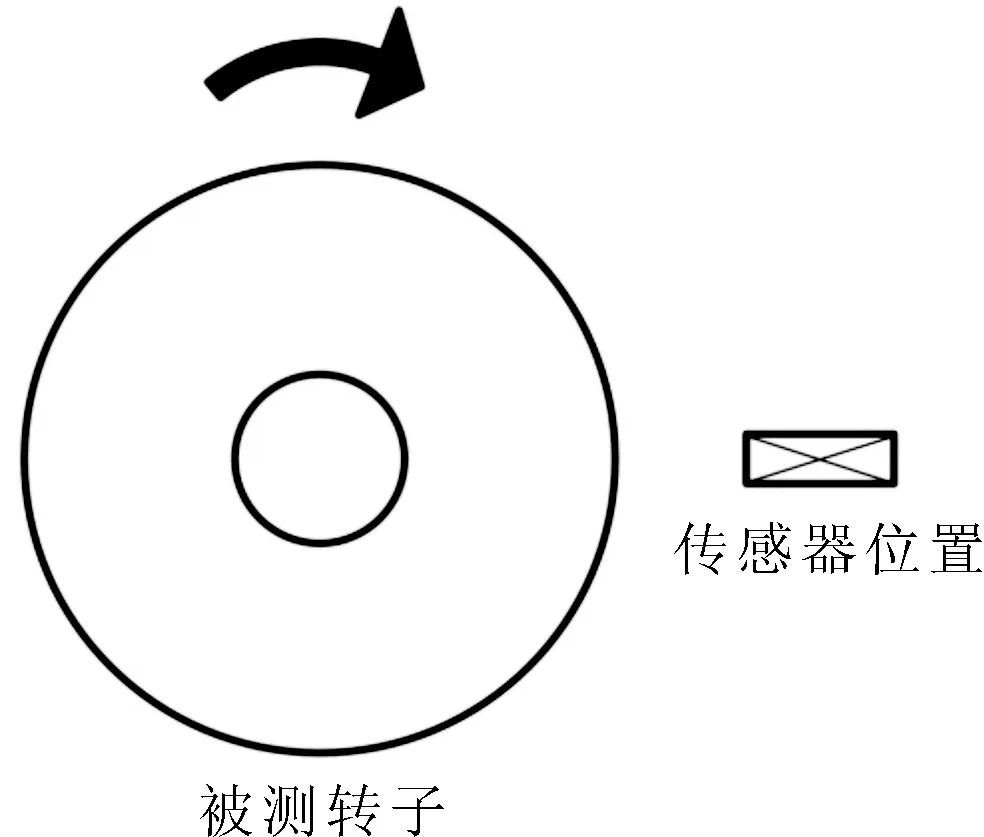
图8 测量方法运动示意图
由于永磁转子产生的磁场是连续的,没有间断点,因此空间中一点的磁感应强度与其附近的磁感应点强度相差很小,可以用这一点的磁感应强度代表该点附近空间的磁感应强度。根据所提出的空间划分策略以及转子中段磁感应强度均匀的特点,且检测目标主要在于磁场的周向分布,因此在转子轴向长度的二分之一处布置一个传感器,其测量结果代表转子中段的磁感应强度;转子两端磁感应强度快速下降,因此在两端各布置一个传感器进行测量;对于磁场的径向分布,则通过前后移动霍尔传感器进行测量。转子每转动单位角度,3个霍尔传感器依次进行采样。传感器的布置形式如图9所示。

图9 传感器的布置形式
由于径向位置不同的子空间体积不一致,在传感器距离转子表面不同的距离测量时,需调整传感器的采样速率。在靠近转子表面时使用较低采样率,随着传感器远离转子表面,采样速率随之提高。根据圆周长公式对转子外部空间测量点周向均匀,采样率应正比于径向距离。
选择的霍尔传感器型号为HAL495A,其主要参数如表1所示。
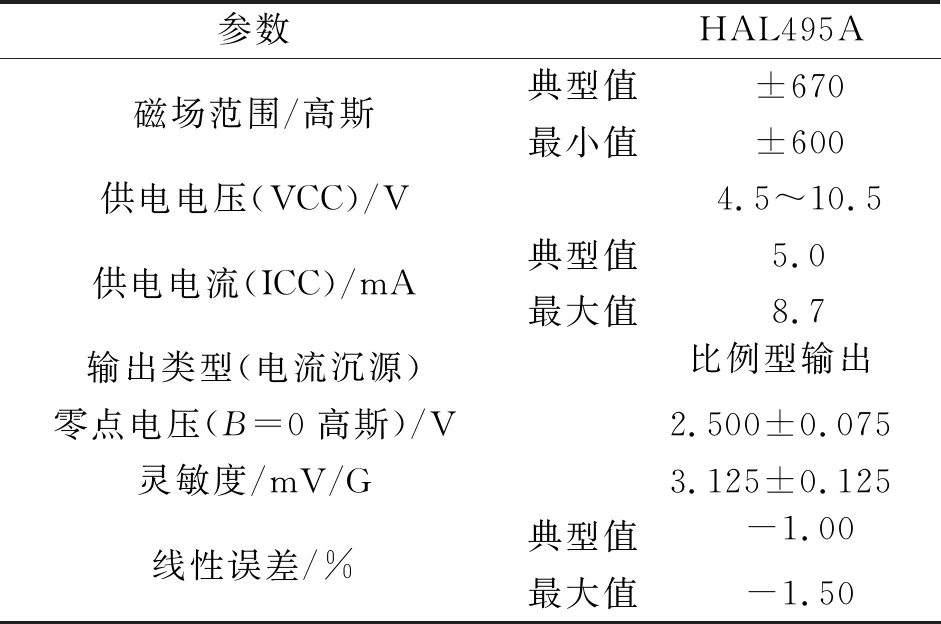
表1 HAL495A电学特性(VCC=5V,T=-40~125°C)
磁感应强度垂直于传感器测量面,或磁感应强度为零时,传感器输出电压为2.5 V。该传感器具有线性输出的特性,将输出电压Uout减去零点电压后,再除以传感器的灵敏度,即可得到磁感应强度B,如式(1)所示,其正负表示磁感应强度穿过传感器测量面的方向。
(1)
2.3 数据采集系统
首先设计了传感器电路。在电路板的供电处和每个传感器的VCC和GND之间都布置了电容,滤除电源的杂波和交流成分,传感器阵列原理如图10所示。

图10 传感器阵列原理图
系统主要由上位机、微控制器、接口电路、霍尔传感器、减速电机及工装构成。微控制器选用STM32f103系列处理器,其片内集成ADC(analog to digital converter)模块,便于转换传感器的模拟输出。数据采集系统框架如图11所示。
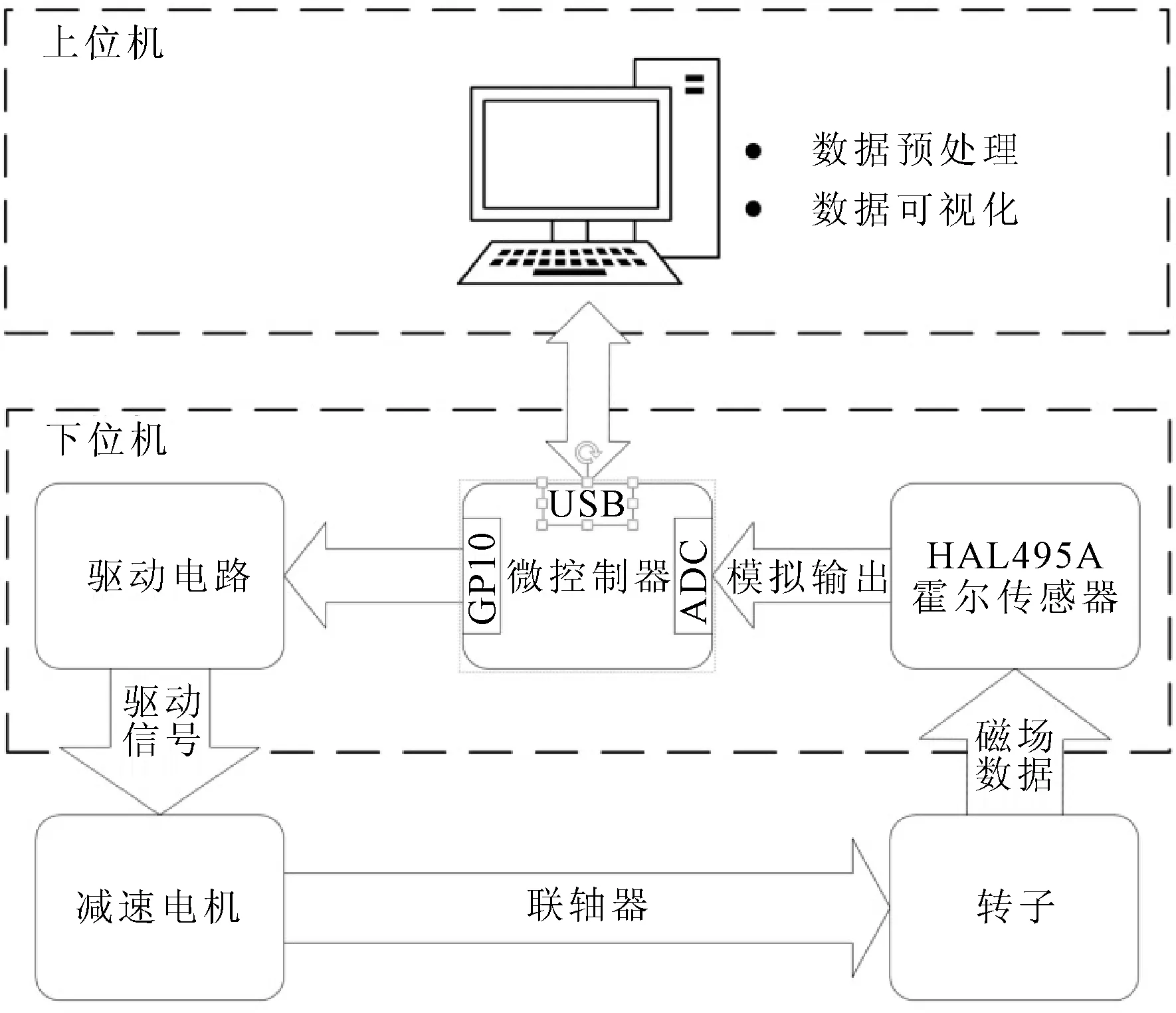
图11 数据采集系统框图
上位机通过USB(universal serial bus)接口与下位机连接,当上位机发送开始采集指令后,下位机启动减速电机,通过联轴器带动转子转动,同时驱动霍尔传感器以设定的采样率进行采样,测量数据被实时传输到上位机。测量完成后对数据进行处理并可视化显示,软件流程如图12所示。
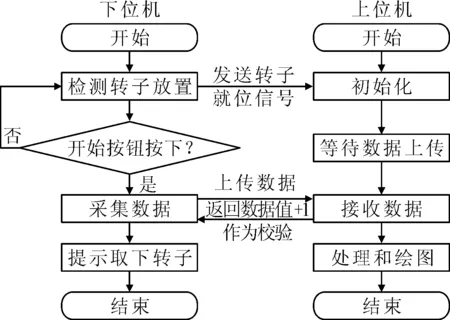
图12 软件流程图
测试时,在每一个转动角度,下位机依次读取3个霍尔传感器的模拟输出,通过ADC转换数字量,再计算出磁感应强度,然后发送到上位机,上位机在FIFO(first input first output)队列中保存这些数据。通过这种方法使上传的数据顺序与图5中遍历而来的线性表相同。
3 实验及分析
3.1 数据获取及采样效果
搭建的数据采集系统如图13所示。通过螺旋微动装置可使传感器平台前后移动,改变传感器与转子距离,并精确测量传感器到转子表面的距离。
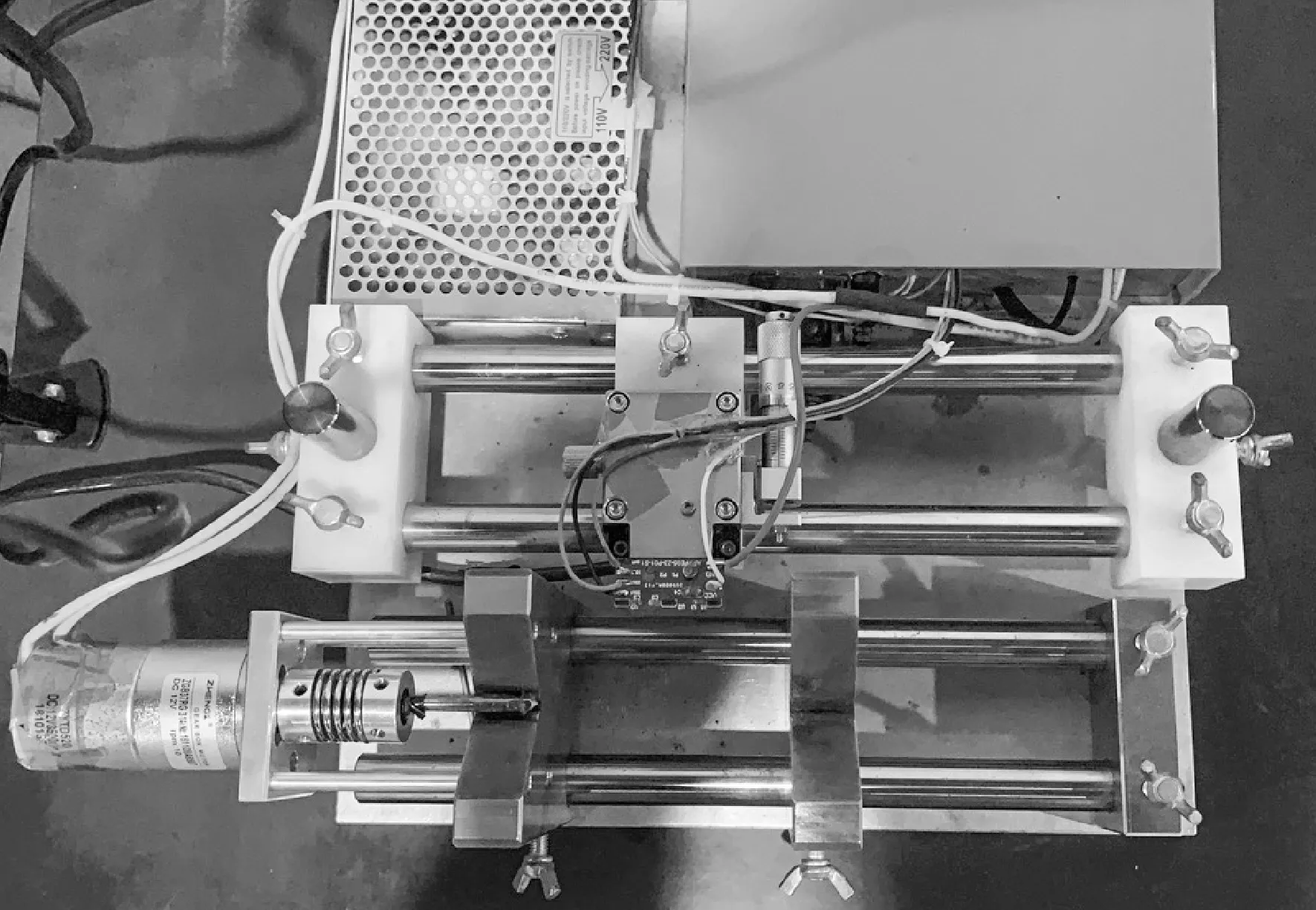
图13 数据采集系统平台
使用该平台对转子进行检测。测量范围为距离转子圆柱面1~20 mm,每隔1 mm进行一次测量。为了使数据对齐,每次检测都从转子的同一位置开始。
首先以固定的采样率fs=100 Hz进行测量,获得网格划分策略的数据,如图14(a)所示;对于均匀划分策略,在距转子圆柱面20 mm处即最外层测量时使用与网格划分策略相同的采样率fs。每次靠近转子时采样率线性减小,直到距转子圆柱面1 mm处采样率减小为fs/6。图14为靠近转子表面处的采样数据点分布。
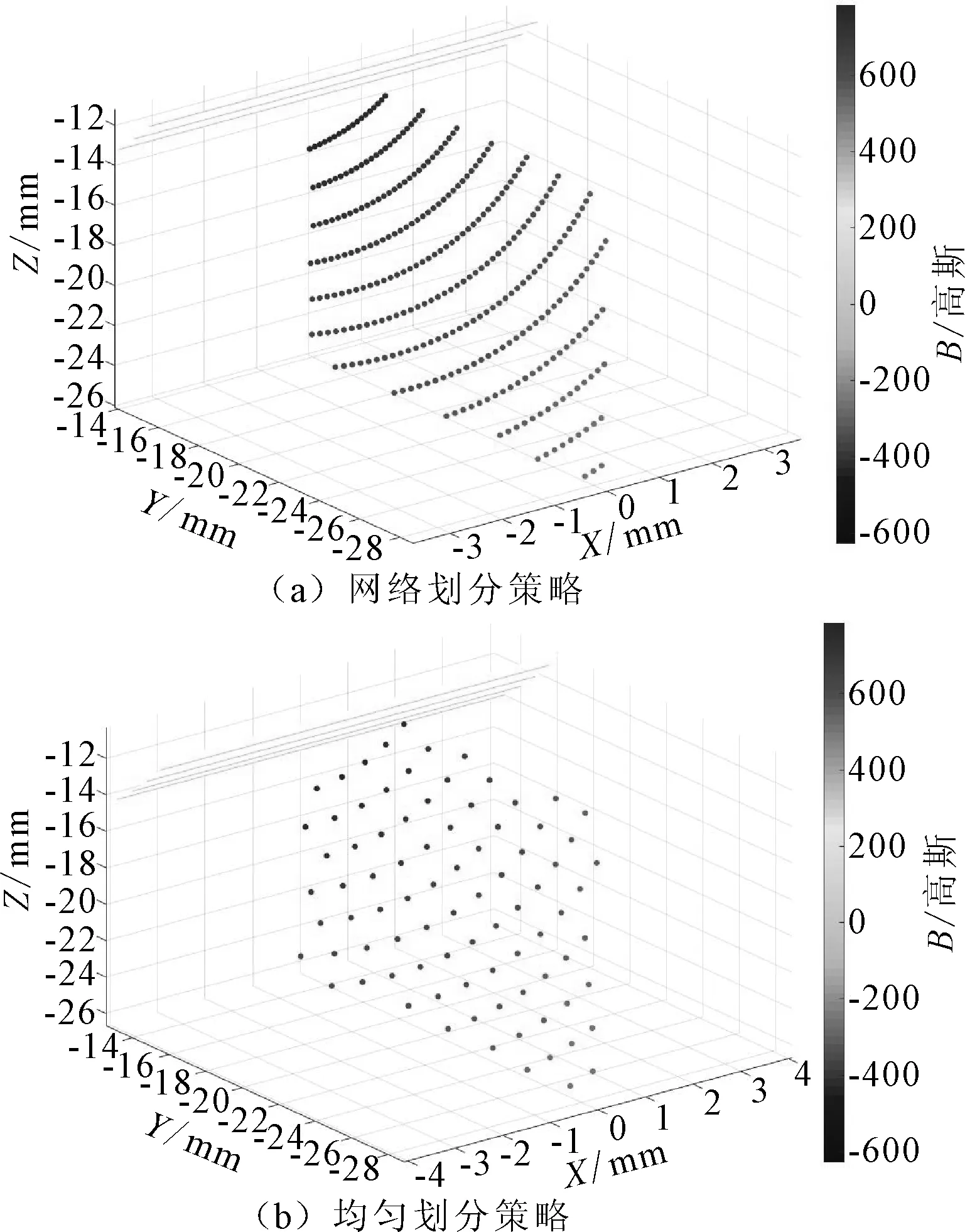
图14 数据点分布
3.2 数据可视化效果比较
通过Matlab软件,分别使用上述两种划分策略得到的数据绘制三维可视化图像[9]如图15所示。从图15可知,转子中央磁场更强,两端较弱,圆周上呈现交变分布,磁感应强度随距离转子表面距离增加而减弱,符合转子磁场分布的特点,并且结果直观,便于观测。
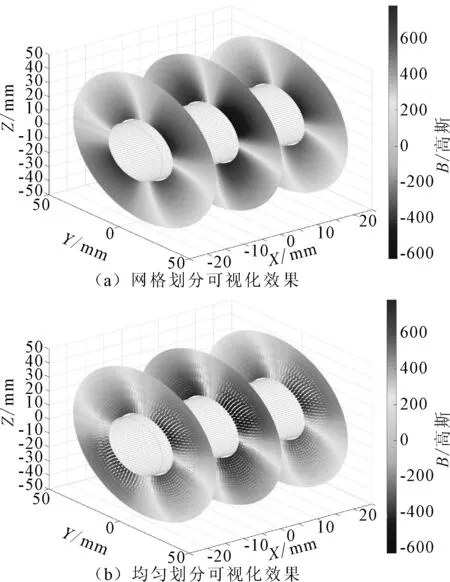
图15 转子磁场空间分布可视化
使用双刺激连续质量分级法[10](double stimulus continuous quality scale, DSCQS)对两种可视化的效果进行评价,该方法一般用于评价被测系统的图像质量或传输系统对图像质量的影响。将上述两张可视化图像按一定规则交替向观察者播放一定时间,播放后观察者须在一定的时间内进行打分,最后将所有给出的分数取平均数作为评价值。表2为绝对评价尺度。
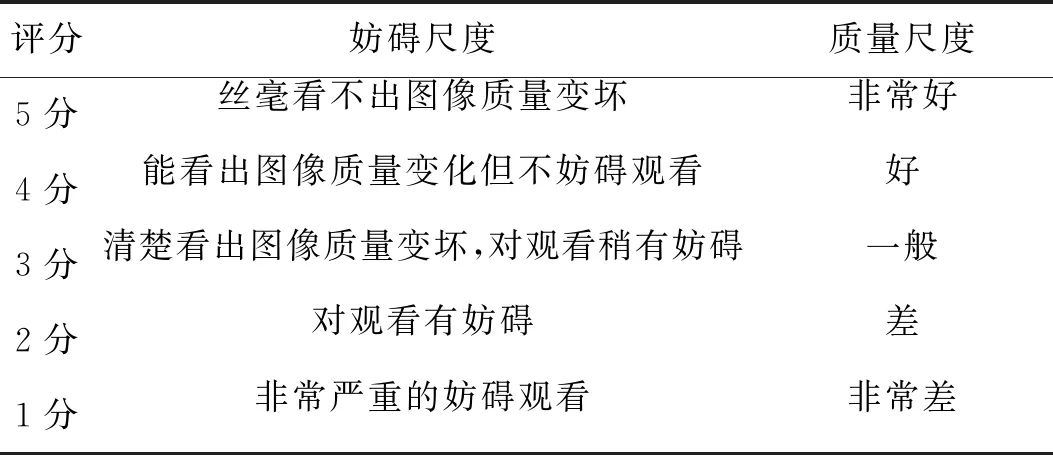
表2 绝对评价尺度
一个评价周期中两种图像均会被显示多次。每次测试中播放图像序列,图像之间间隔为3 s。序列将播放5次,取平均分作为得分。图像序列如图16所示。
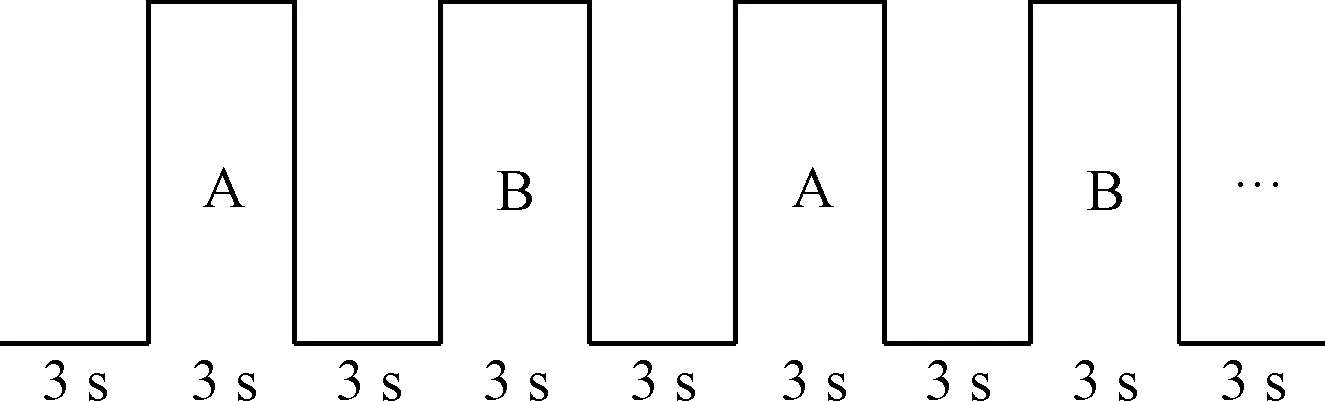
图16 图像序列
邀请15名参与者进行打分。观看时使用相同的显示器,观看座位保持固定。结果如图17所示。结果显示大部分观察者都认为可视化效果略有差距,但对观察磁场分布的情况没有影响,平均得分为4.0分,表明数据点均匀分布时可视化效果仍然良好。图15(a)中共使用的数据点数量为23 260个,而图像15(b)中使用的数据点数量为11 778个,在最大采样率相同的情况下数据量减少49%的情况下,且仍能保持相同水平的可视化质量,证明了该方法的有效性。
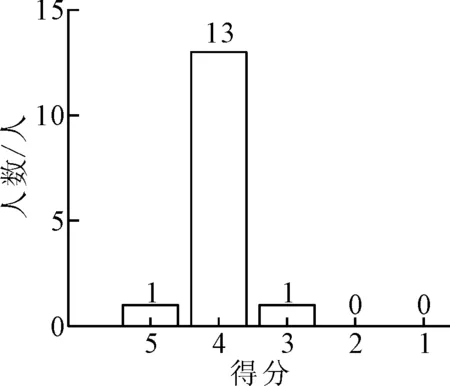
图17 投票结果
4 结论
针对永磁同步电机磁场检测问题,通过优化转子外部空间的划分策略,提出了一种简便的转子磁场可视化检测方法。首先设计了转子外部空间划分的数据结构,组织了需要测量的数据点;并根据这一结构设计了转子磁场测量平台,测量了转子磁场数据,并根据磁感应强度的大小用彩色标记将该位置测得的磁感应强度标记在散点图上。最后通过实验对比了空间网格划分和均匀划分后进行可视化的效果,证明了该方法的有效性。所提出的方法简单、有效,实现成本低,通过优化转子外部空间划分,在保证相似可视化图像质量的前提下大大减小了数据量,在永磁电机制造和电机控制等领域都具有重要意义。
