基于本地无线同步的微动勘探仪设计
2022-05-31牟新刚朱开瑄
牟新刚,朱开瑄,周 晓,喻 颜
(武汉理工大学 机电工程学院,湖北 武汉 430070)
短周期脉动也称常时微动(简称微动)是地面土层对于外界的各种干扰的响应,微动台阵布置通常半径在30 m以内。由于外界任意时间都存在着震动,因此微动的检测没有时间限制[1]。微动勘探常用的数据处理方法包括:单点谱比法与台阵方法。微动数据经过单点谱比法(spectral ration method,H/V)处理后在低频处存在峰值,该峰值频率称为卓越频率[2]。常时微动特性受周围环境影响,因此同一地方的不同时刻幅值大小会有所差异,但是频谱形状基本相同。单点谱比法处理后的微动数据通常有以下作用:建筑物自振周期选取,场地土类型确定[3],建筑物场地选择[4]。台阵方法数据处理采用高频率频率-波速法(high resolution frequency-wave number spectrum analysis, HRFK)[5],该方法可用于反演地质构造与城市孤石勘探[6]。
目前,微动勘探多用于市政工程与基建工程中,因此常在隧道、高楼群、地下以及密林中勘探。微动勘探设备多采用GPS(global positioning system)信号同步[7]。GPS信号在上述场合中存在信号弱、不稳定的缺点。现有仪器通常在上述场合采用外接同步线方式实现同步勘探。有线同步方式存在设备同步数量较少,线缆较重,不方便作业的缺点。
为了在隧道、高楼群、地下以及密林等无法使用GPS信号地区,高效、高精度地进行微动勘探,设计了一种基于SYN1000模块的本地无线同步的微动勘探仪。该仪器弥补现有以GPS同步仪器的不足同时,在开阔地能与现有以GPS同步仪器进行相同性能的勘探。
1 勘探方案设计
为满足单点谱比法与台阵勘探法需求,制定了如图1所示勘探方案。微动勘探台阵半径距离通常在30 m以内,由于台阵勘探法要求各个仪器间相关性在0.999以上,相位差在±3~5°以内,设备同步精度需低于1 μs[8]。因此设计勘探仪同步采用SYN1000同步模块。微动勘探仪的方案为:将1~6号勘探仪按图1台阵摆放,数据收集站放置于勘探台阵远方,数据收集站发送同步指令,实现各个勘探仪与数据收集站的时间、脉冲同步。完成同步后发送采集指令,勘探仪完成指定时长采集,将数据发送至数据收集站内。若台阵半径大于30 m,可添加WiFi与同步模块中继站实现远距离同步勘探。

图1 台阵勘探方案
2 系统硬件设计
系统选取磁电式速度传感器PS-4.5C作为脉动勘探仪的传感器,模数转换选择ADS1251,勘探仪主控芯片为STM32F412,WiFi模块为Marvell 88W8801。微动勘探仪总体结构框图如图2所示。数据收集站与微动勘探仪采用WiFi通信,当勘探仪连接至电脑WiFi后,将设备信息(电池电量、SD(secure digital)卡剩余容量等)发送至数据收集站。工作人员通过上位机发送采集指令至数据收集站,勘探仪主控控制三轴上的ADS1251模块,该模块根据指定频率、时长进行同步采样,并保存至本地。采集完成后勘探仪将数据发送至数据收集站,从而实现单次微动数据采集。
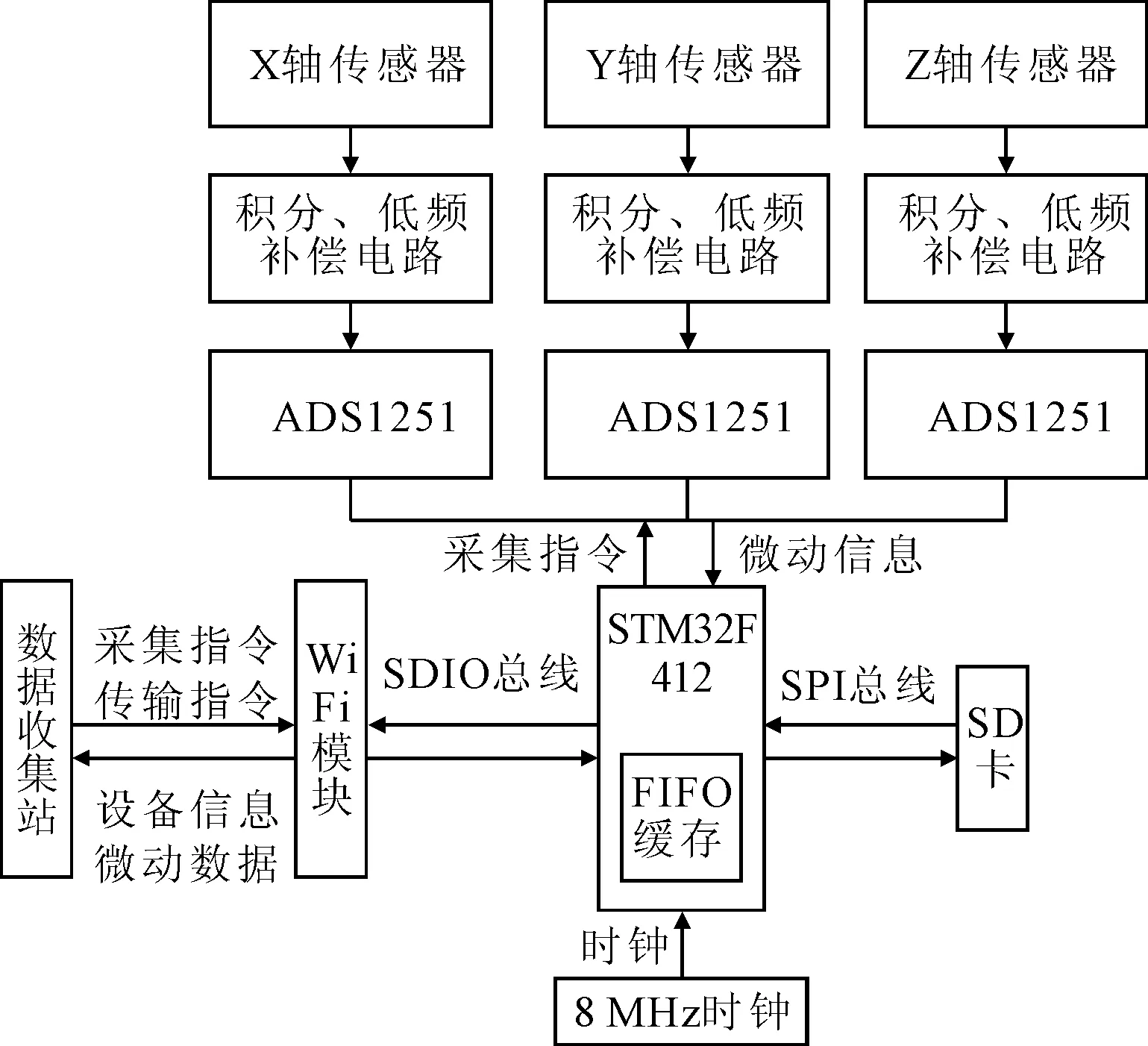
图2 系统总体结构框图
2.1 传感器及低频补偿电路
以PS-4.5C传感器为模型建立低频补偿电路,主要技术指标如表1所示。
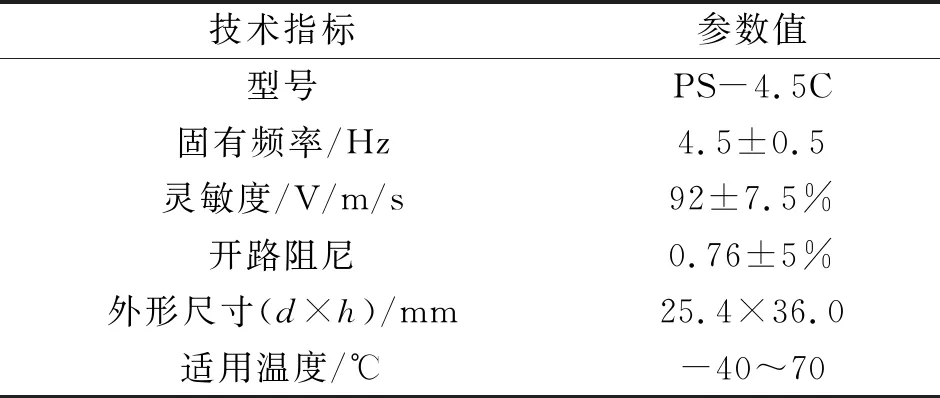
表1 PS-4.5C传感器主要技术指标
从表1可知,PS-4.5C磁电式速度传感器的固有频率为4.5 Hz,通常常时微动频率为0.5~20 Hz,传感器需进行低频补偿。采用串联补偿法[9]进行低频补偿。磁电式速度传感器添加补偿电路的传递函数为:
(1)
式中:k0为传感器灵敏度系数;ξ0为传感器固有阻尼;ξ1为传感器最佳阻尼;ω0为矫正前传感器固有角频率;ω1为期望补偿后的角频率;G0(s)为传感器传递函数;C(s)为低频补偿电路传递函数。
结合表1与式(1)传感器传递函数为:
(2)
将C(s)进行拆解,得到高通、带通、低通滤波器的传递函数为:
(3)
由于ω1<ω0因此式(3)中第2个等号后面的第1项高通滤波器可换成全通滤波器[10]。在实际电路中由于振动位移是待测量参数,然而磁电式速度传感器输出是速度参数,因此需要对传感器输出进行一次积分处理才能得到振动位移参数,为防止积累零漂,因此采用一阶惯性环节实现积分处理,实现框图如图3所示。单轴传感器补偿电路如图4所示。

图3 补偿电路原理框图
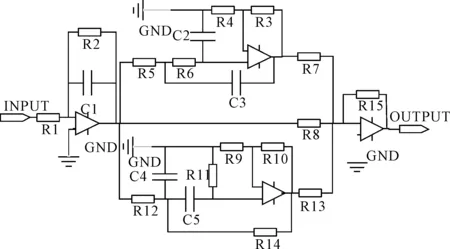
图4 磁电式传感器低频补偿电路
传感器补偿前后的Bode图如图5所示。通过对比图5中未串联补偿前传感器Bode图(虚线)与添加串联补偿后新模型Bode图(实线)可知:未加补偿电路前传感器在4.5 Hz处增益为35.6 dB,添加补偿电路后传感器与补偿电路组成的新模型在0.45 Hz处的增益为33.8 dB,因此可以认为磁电式速度传感器添加串联补偿后系统固有频率从4.5 Hz降至0.45 Hz,同时相位整体上改变不大。
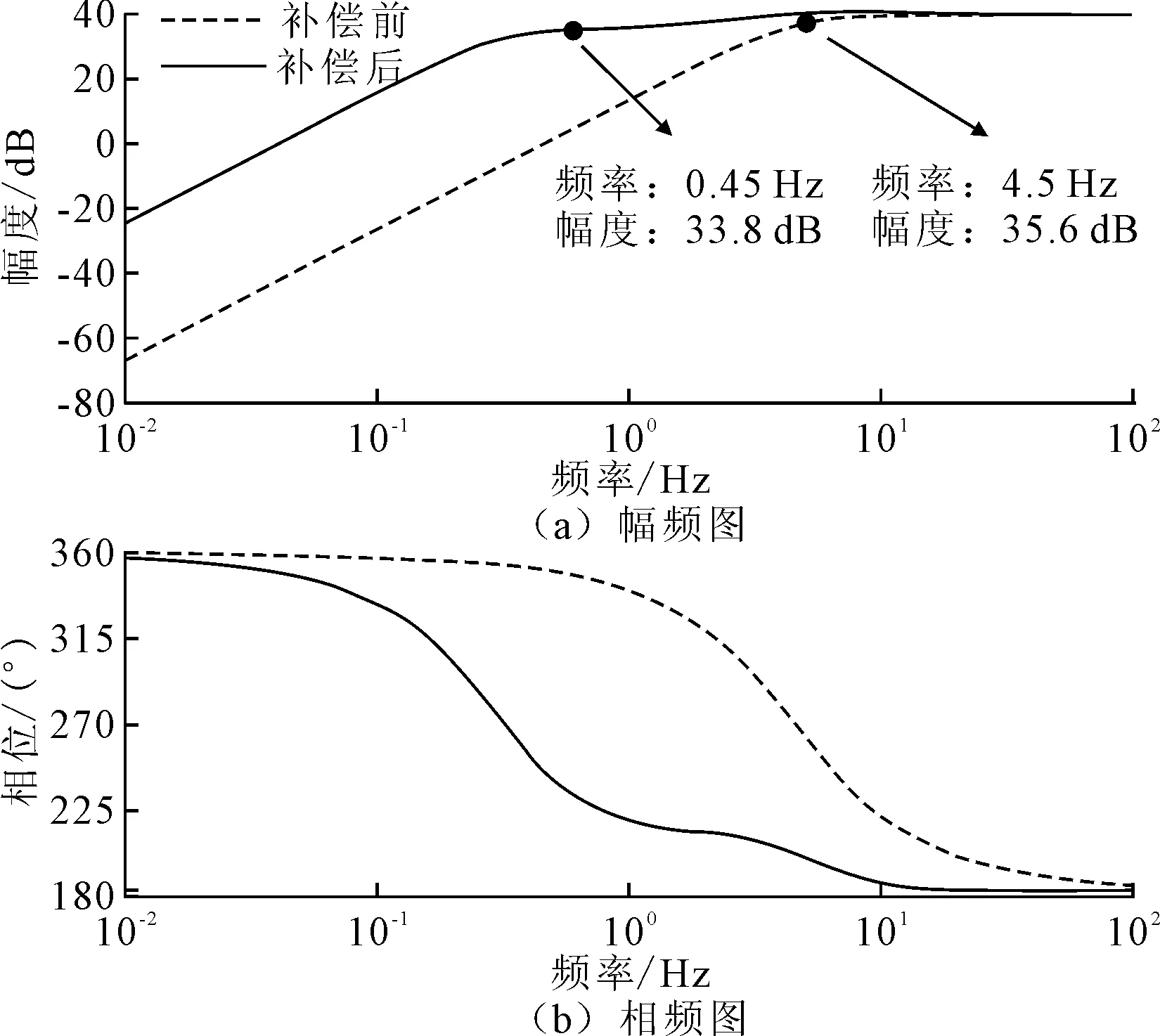
图5 传感器补偿前、后Bode图
2.2 AD电路
模数转换模块ADS1251具有24位高精度、宽动态范围、采样频率快的特点。因此ADS1251适合作为高精度地质勘探设备的模数转换器件[11-12]。本系统采用+5 V电源供电,2.5 V参考电压,ADS1251电路图如图6所示。除去符号位后,理论最小精度为2.5/223≈0.30 μV,满足高精度微动勘探需求。通过使用单功能的3个运算放大器和4个外部电阻,ADS1251可以配置为相对于地的双极性输入。由于微动信号电压输入范围在±5 V之间,R1,R4为10 kΩ,R2为5 kΩ,R3为20 kΩ。3轴ADS1251的SCLK引脚接主控同一引脚,实现多通道同步采集。

图6 ADS1251电路图
2.3 设备同步方案硬件设计
SYN1000同步模块为主、从模块,分别安装于数据收集站与各个勘探仪中。SYN1000同步模块电路图如图7所示。经测试该同步模块在室内中间隔有两堵厚度约为20 cm的实心墙情况下,依然能够保持800 ns高精度同步。主从同步模块电路一致。SYN1000同步模块与主控之间信号传输都采用高速光耦将其隔离, HPSYNC引脚为高速同步脉冲输出。可由用户设定输出频率,SYN1000同步模块通过UART2将本地时间信息、高速同步脉冲占空比等信息发送至主控。SYNC ON引脚为勘探仪主控控制该模块是否工作。

图7 SYN1000同步模块电路图
2.4 STM32F412电路
主控芯片采用STM32F412RET6,该芯片主频高达100 MHz,内置1 MB内存以及256 KB的SRAM(static random access memory),该芯片还集成大量的外围设备及接口电路,并且该芯片价格低廉,资料齐全,开发难度低。
2.5 WiFi模块电路
WiFi模块采用的是Marvell 88W8801无线WiFi智能模块,该模块价格低廉,性能可靠。通过WiFi传输能够有效提高工作效率,降低勘探人员操作仪器难度,相比于有线数据传输方式,减少勘探人员物品携带,降低了野外勘探所需时间,有效提高勘探效率。
3 系统软件设计
勘探系统上电后采集设备首先将本机设备信息发送至数据收集站,当接收到数据收集站采集指令时,主控SCLK引脚发出时钟至ADS1251,并打开采样中断,采样指定次数的数据后,通知数据收集站,数据收集站发送传输指令,采集的数据分包发送至数据收集站,从而实现数据采集。软件总体设计流程如图8所示。

图8 软件设计流程图
3.1 勘探仪同步设计
同步软件设计方案流程如图9所示,主从模块分别安装在主设备以及检波采集设备中。
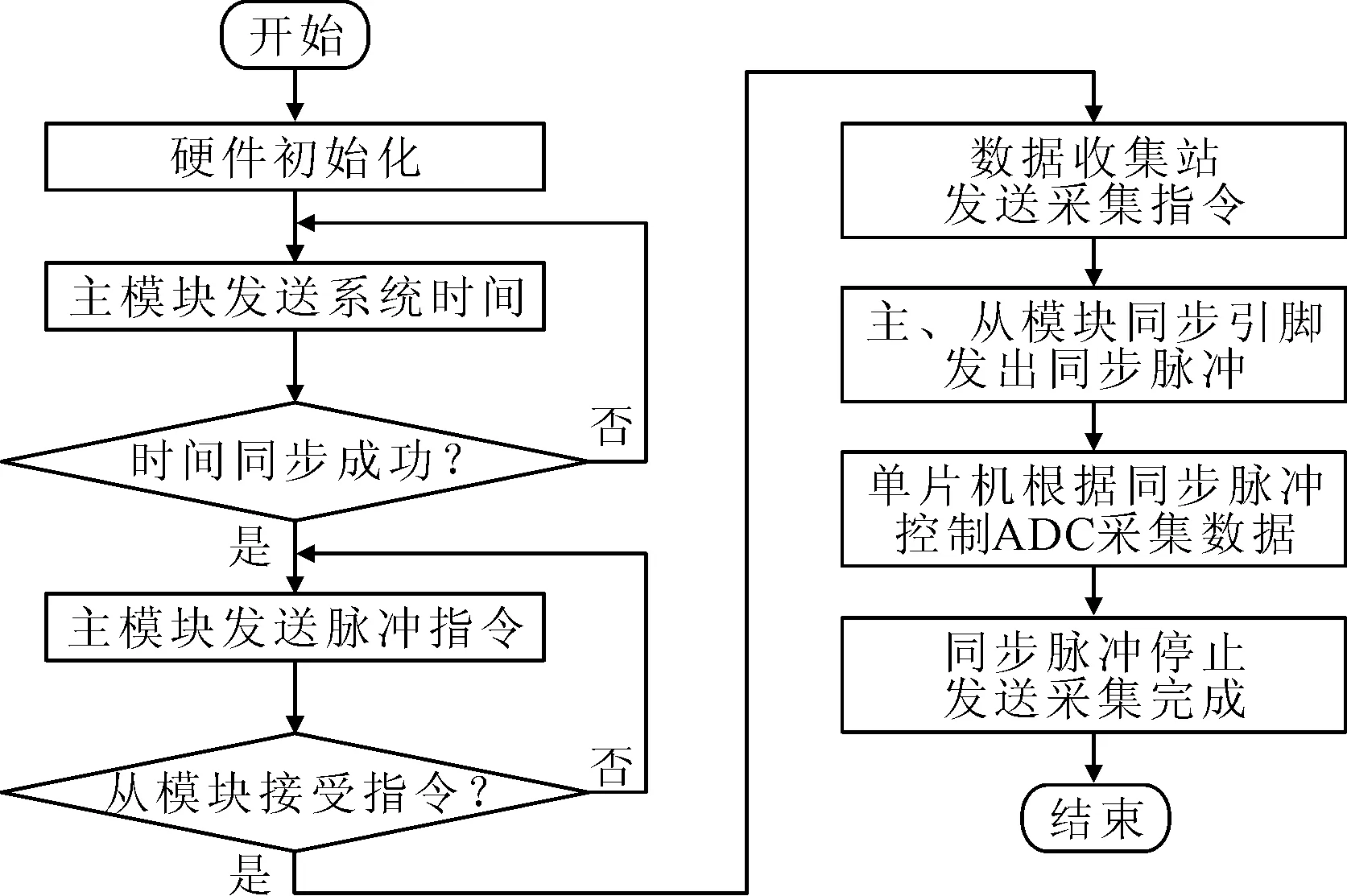
图9 同步软件设计流程图
无线同步模块通过发送同步脉冲至STM32F412RET6来确保不同设备间的采集时间差控制在1 μs以内。硬件上电后主、从同步模块首先进行本地时间校准,若发现主、从模块本地时间不匹配,则以主模块本地时间为系统时间。主从模块匹配后,数据收集站等待接收上位机开始采样指令,数据收集站接收到开始采样指令后,主同步模块向从同步模块发出当前时间戳,从同步模块接收到时间戳后打开SYNC ON引脚中断并记录当前时间戳。当设备完成采样后从同步模块关闭SYNC ON引脚中断,从而实现设备同步。
3.2 多台勘探仪数据对齐程序设计
由于采用本地无线,各个勘探仪开启采样时刻存在不一致的问题,因此各个勘探仪数据需进行时间戳对齐处理。其流程如图10所示。

图10 时间戳对齐软件设计流程图
在数据收集站进行时间戳对齐前需将各个检波器传输来的数据打开,对比各设备采样起始时间,获取最晚启动时间,按最晚启动时间截取数据后,计算最早结束时间,提取最晚启动时间与最早结束时间内的数据为有效数据并去除时间戳保存。
4 实验结果与分析
4.1 等效噪声及动态范围测试
硬件电路受到各种元器件以及走线影响产生各种噪声,噪声过高影响系统动态范围。为了解仪器噪声特性,将各个仪器输入端短接,计算等效噪声(root mean square,RMS)。对某台仪器3通道各取1 000个点,其测试结果如图11所示。经计算,图11中X、Y、Z 3通道的等效噪声分别为:4.61 μV,3.57 μV,3.20 μV。根据3通道等效噪声计算各个通道相应的动态范围,分别为121 dB,123 dB和124 dB。等效噪声与动态范围均满足系统需求。
4.2 同步脉冲时间差测试
取设备1与设备2两台勘探仪。将设备1的HPSYNC_1引脚通过延长线与光耦传输至30 m处,与设备2的HPSYNC_2引脚脉冲上升沿进行对比,测试两台设备间上升沿时间同步差。其结果如图12所示。图12(a)中上方脉冲为设备1的HPSYNC_1引脚输出,下方脉冲为设备1 的HPSYNC_1引脚经光耦后的输出。图12(b)中下方上升沿为设备1的HPSYNC_1引脚上升沿,上方下降沿为设备1的HPSYNC_1引脚经光耦后反相的下降沿。图12(c)中下方上升沿为设备2的HPSYNC_2引脚上升沿,上方下降沿为设备1的HPSYNC_1引脚经光耦后反相的下降沿。
图12中光耦下降沿与设备1 HPSYNC_1时差为150 ns,光耦本身延迟为45 ns,光耦下降沿与设备2 的HPSYNC_2引脚时差为350 ns,则设备2的HPSYNC_2上升沿与设备1的HPSYNC_1上升沿时差为545 ns,满足系统需求。
4.3 仪器野外勘探测试
仪器野外勘探场地选取福州金塘路边平坦开阔的土地上。采用200 Hz采样频率,采集30 min。勘探仪按图1方式摆放。0.1 Hz高通滤波后的数据如图13所示。数据经单点谱比法处理后的功率谱如图14所示,从图14可知,该地卓越频率为1.5 Hz。为防止共振,该地建筑物设计时,固有频率应避免1.5 Hz,降低地震可能造成的破坏。
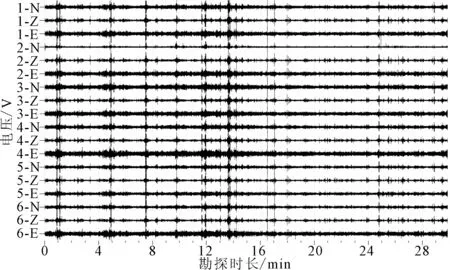
图13 0.1 Hz高通滤波后数据

图14 单点谱比法处理后的功率谱
该地区经HRFK处理后的速度-深度图如图15所示,从图15可知,该仪器有效勘探深度在80~90 m。
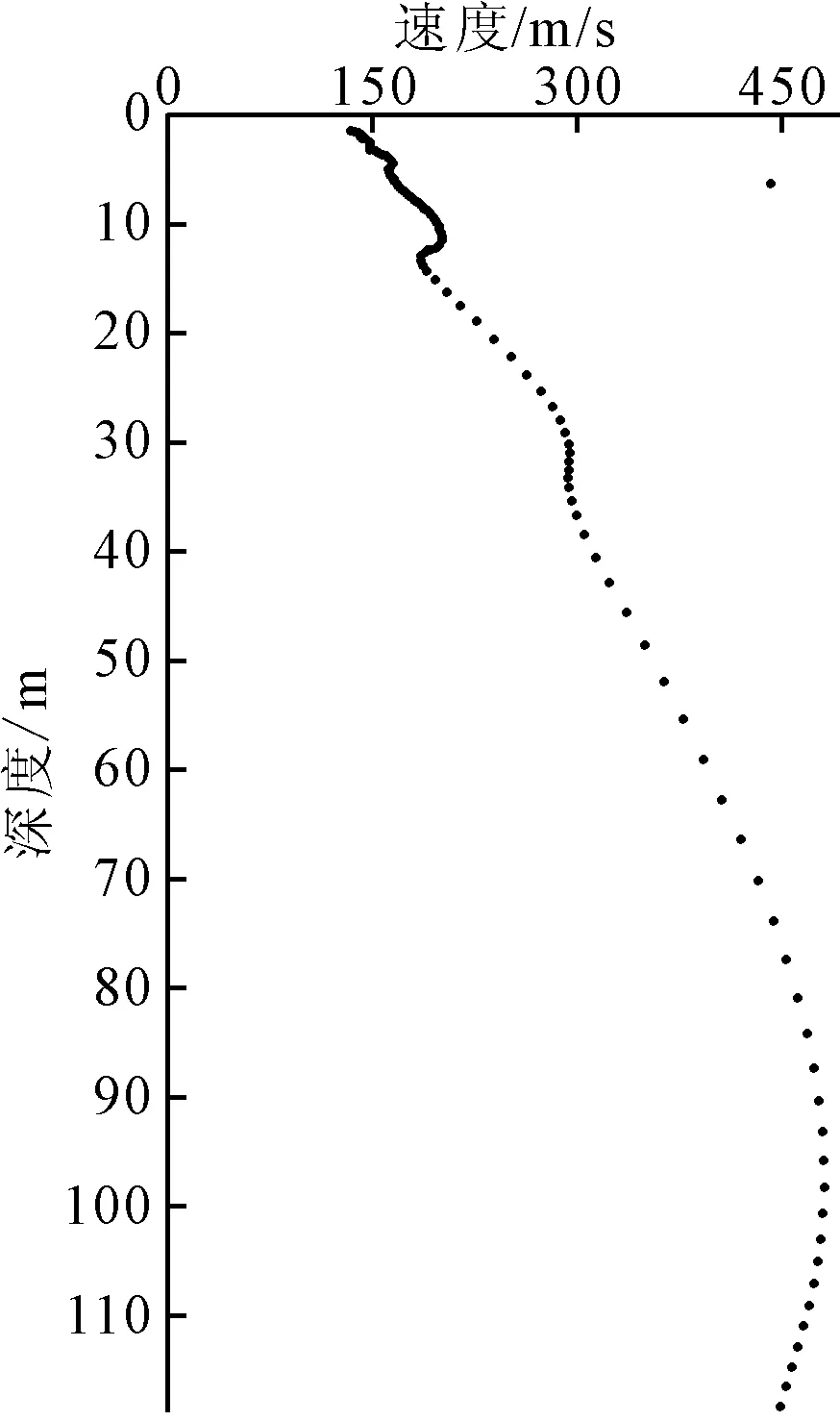
图15 HRFK处理后速度-深度图
4.4 仪器性能对比
选取重庆地质仪器有限公司产的EPS便携式数字地震仪与本仪器的关键性能进行对比,如表2所示。

表2 EPS地震仪与本文仪器部分性能对比
从表2可知,本仪器在主要性能上能够达到现有市面上仪器水平。并且在隧道、高楼群、地下以及密林等场合具有更高的勘探效率。
5 结论
为实现在隧道、地下以及密林等无法连接GPS信号地区,高精度、高效地进行微动勘探,设计了一种基于SYN1000模块的本地无线同步微动勘探仪。野外实际勘探表明:该仪器的等效噪声均低于5 μV,动态范围均大于120 dB,30 m处同步脉冲时间间隔低于800 ns,符合系统需求。野外某地勘探的数据经H/V法与HRFK法处理后,得到某地的卓越频率为1.5 Hz,地层反演有效深度为80~90 m。该系统具有较高的可行性与实用性。
