基于融合定位的预处理机制设计
2022-05-30陈挺


摘要:由于高楼大厦、高架桥、隧道、电磁、天气等诸多因素影响,车载智能终端系统的卫星定位单元所接收的卫星信号容易受到干扰,造成衰减,对车载智能终端系统的导航定位效果产生较大影响。针对上述情况,基于车载智能终端系统的构成,方案设计了融合定位模型,通过对其各分布子系统的信号数据预处理,并反馈至卫星定位单元协助其进行定位解算。通过测试实验对比分析,采用此方案方法能够有效地缩短了车载智能终端系统的定位时间,改善弱信号条件下的定位精度。
关键词:定位精度;分布;融合;预处理
一、引言
随着车联网技术地不断发展,作为车联网系统最重要组成部分之一的车载智能终端,其应用需求也越来越多样化。车载智能终端内部不仅包含卫星定位单元,大都还分布集成了惯性测量单元(Inertial Measurement Unit,IMU)、控制器局域网络(Controller Area Network, CAN)通信单元、大气压测量单元、信号检测单元、地图单元等子功能模块。与此同时,用户对车载智能终端的定位性能及精度的要求也越来越高。基于合理利用分布资源、节约成本、融合提升定位性能的原则,通过与卫星定位模组厂商深度合作,分别发挥各自在数据预处理和定位求解方面的不同优势,本文提出了车载智能终端系统融合定位的解决方案[1],并着重设计实现了融合定位前端数据的预处理机制,为后端负责定位求解的卫星定位单元输入更精确的数据,辅助提升卫星定位单元的定位精度及性能。
二、 智能终端融合定位系统框架
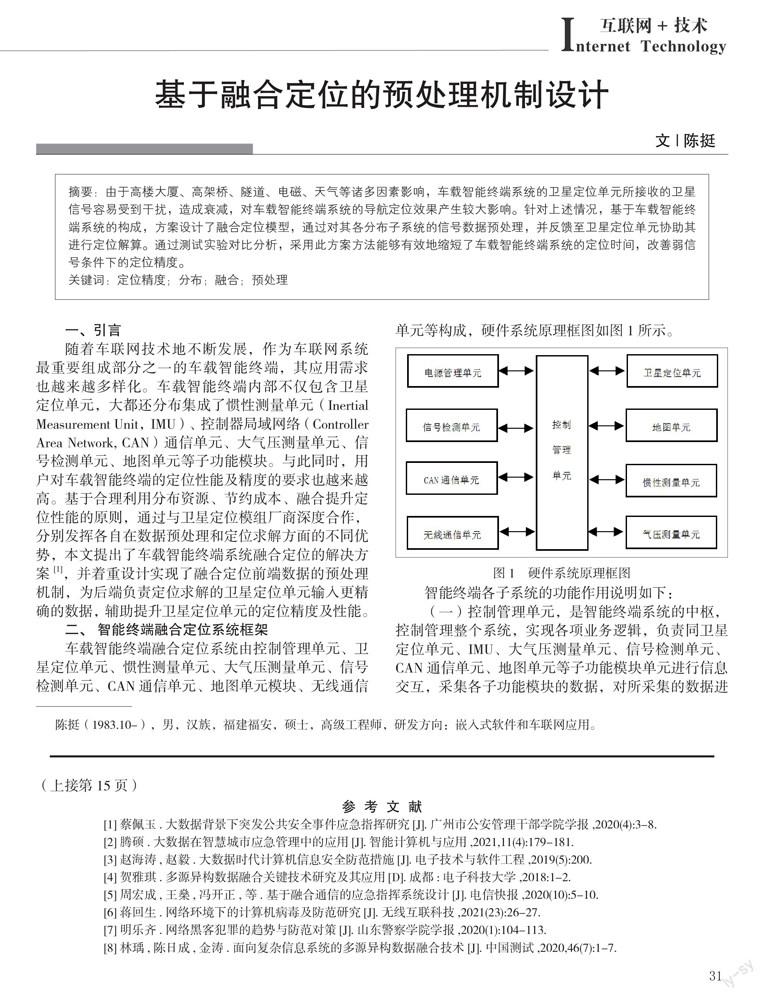
车载智能终端融合定位系统由控制管理单元、卫星定位单元、惯性测量单元、大气压测量单元、信号检测单元、CAN通信单元、地图单元模块、无线通信单元等构成,硬件系统原理框图如图1所示。
智能终端各子系统的功能作用说明如下:
(一)控制管理单元,是智能终端系统的中枢,控制管理整个系统,实现各项业务逻辑,负责同卫星定位单元、IMU、大气压测量单元、信号检测单元、CAN通信单元、地图单元等子功能模块单元进行信息交互,采集各子功能模块的数据,对所采集的数据进行融合预处理,并反馈输入至卫星定位单元;
(二)卫星定位单元通过通用异步收发传输器(Universal Asynchronous Receiver/Transmitter, UART)接口与控制管理单元进行通信,对外输出位置信息,接收控制管理单元预处理输入的各项辅助数据,结合卫星天线接收的星历数据进行融合定位计算;
(三)IMU负责计算终端的航向方位动态信息和三轴加速度信息,并输出至控制管理单元;
(四)大气压测量单元集成了气压传感器,实时采集大气压数值,并通过控制管理单元计算转换成海拔高度,以供进行业务数据处理和上传远程服务器;
(五)信号检测单元负责采集点火开关、转向灯等车辆的信号,协助控制管理单元确认车辆状态;
(六)CAN通信单元负责采集车辆速度、发动机转速等汽车总线信号数据,并根据定义解析转换成相应的数值;
(七)地图单元接收显示卫星定位单元的实时位置数据,并与内置的地图信息进行位置匹配,在地图上进行逆向定位,反馈输出匹配点关联信息,如经纬度、行进方向、海拔、道路属性等;
(八)无线通信单元负责移动通信,实时输出当前通信基站的小区识别码等信息,并与远程服务器进行应用数据交互。
在车载智能终端融合定位系统,控制管理单元对从各功能单元模块采集的方位、速度、加速度、海拔高度等数据进行预处理,并向卫星定位单元输入经过预处理的数据,卫星定位单元根据当前定位信号情况及解算的位置数据质量,融合外部数据进行辅助定位计算。在借助外部数据参与定位计算,卫星定位单元不仅可以基于输入的速度以及海拔信息来求解未知向量,加快定位速度,还可以利用输入的航向方位、加速度值进行惯导辅助定位计算,也可以结合地图单元反馈输出的位置信息,校正自身计算的定位结果,多方面地提升定位数据准确度。
三、数据融合预处理机制
(一)车速融合预处理
(二)海拔融合预处理
在卫星定位计算中,海拔是一个关键的坐标信息。如果能够提前获取海拔,通过在相邻定位历元间构建基于气压海拔短时变化量的约束方程并在局域垂线站心坐标系下进行联立求解,能够在不具备气象基准修正信息的情况下,能够降低定位计算复杂度,也能缩短定位时间,提高卫星导航定位的精度[5]。
智能终端融合定位系统中,控制管理单元通过大气压测量单元實时采集大气压数据P,并根据海拔大气压转化公式(5):
计算出海拔数值(其中H为海拔高度,P0为标准大大气压值101.325 kPa)[6]。但是通过大气压测试单元计算输出的海拔,受环境因素影响误差较大,若直接参与定位将引入初始计算误差,因此同样也需要进行标定补偿预处理,其机制如下:
在标定学习阶段,在满足可用卫星数量不小于4颗,且各卫星信噪比大于30,定位模式为3D定位,PDOP值、HDOP、VDOP均小于3的精确定位条件下,控制管理单元采集卫星定位单元计算输出的海拔Aj、气压测量单元所得的海拔Ai,基于当前精确的卫星定位单元输出的海拔对气压测量单元所得的海拔进行标定补偿,得到Ai和Aj之间补偿数值δi。其中Ai采用去最值取平均方式降低随机干扰,并结合通信单元输出的小区识别码cell id等信息,形成了一组cell id、Ai、Aj、经纬度、时间等要素的映射关系。在车辆的运行中,动态地完善网格区补偿关系表。同时基于联网功能,车载智能终端在每生成一组网格区的补偿关系,就可通过通信单元无线联网功能,把当前网格区类型、小区识别码、 经纬度、大气压海拔Ai与卫星定位单元海拔Aj及二者补偿数值δi等信息,上传至远程服务器端。远程服务器利用其运算力及大数据算法,对车联网系统内不同终端的数据进行融合处理,进一步得到同一网格区下,不同海拔区间、不同时段条件下,更精确、更全面的大气压海拔Ai和卫星定位单元海拔Aj的补偿数值δ'i组,进而得到不同网格区的补偿数值δ'i表,并可通过无线通信网络实时传输当前网格区的补偿数值表给车载智能终端。
在数据预处理阶段,车载智能终端控制管理单元根据大气压测量单元计算的海拔Ai和通信单元输出的当前小区识别码或当前经纬度,获取相应的海拔补偿数值,计算得到标定条件下的海拔A'j,反馈输入至卫星定位单元[7]。其中海拔补偿数值应优先使用从远程服务器端获取的精确补偿表对应数据δ'i,其次采用车载智能终端离线学习标定的补偿表的对应数据δi,当δ'i和δi数据表均未生成时,取终端内部前一次有效补偿数值δ。
卫星定位单元在卫星信号较弱的情况下,可利用输入的海拔A'j,在相邻定位历元间构建约束方程求解未知向量,加快定位速度。
(三)惯性数据融合预处理
使用微型惯性传感器(Micro Electro Mechanical System, MEMS)构成的捷联式惯导系统是卫星定位的重要手段[8],其精度决定了惯性导航系统的精度,所以惯性导航系统的一项主要工作就是控制惯性传感器误差。
提高惯性导航系统精度的手段大致有以下两种,第一种是从工艺上提高惯性传感器的精度;第二种是采用误差补偿方式来对于系统的误差进行补偿[9]。本方案属于分布式捷联惯导系统,利用车辆真实姿态,结合算法拟合方式进行补偿误差。
控制管理单元实时通过CAN通信单元采集车辆油门踏板位置、刹车踏板位置、转向轮角度、车速信息,计算出油门踏板、刹车踏板、转向轮角度、速度的变化率。基于车辆与IMU具备相同惯性属性原则,对IMU输出的纵向加速度、偏航角速度进行初始过滤清洗,剔除毛刺数据,得到更准确地惯性数据。
进一步基于实时车速、转向轮角度的计算得到的加速度和角速度,同IMU输出纵向加速度、偏航角速度,建立最小二分乘法归一化拟合曲线,标定学习得到IMU纵向加速度基于车辆加速度,偏航角速度基于转向轮角度的补偿系数[10]。
控制管理单元实时采集惯性测量单元输出的动态角速度和加速度信息,并通过CAN通信单元采集车辆油门踏板位置、刹车踏板位置、方向盘转角信息,计算油门踏板、刹车踏板、方向转角的变化率[11]。车载智能终端集成的惯性测量单元和其所承载的车辆具备相同的惯性属性,因此控制管理单元根据油门踏板、刹车踏板、方向盘转角的变化情况,可以对惯性测量单元的加速度、角速度数值的进行有效性判断、清洗和过滤毛刺数据,进而得到更准确地惯性数据。
经过控制管理单元预处理的加速度、角速度信息,结合卫星定位单元的初始经纬度、速度、方向信息,卫星定位单元可执行惯导定位解算,用于弱信号下的定位求解及数据校正,提升定位数据的准确性和精度。
此外,根据车载智能终端的运算力和性能越来强大的发展趋势,控制管理单元也可以参与惯导定位中局部或者全部的参数项的解算,进一步分担位置卫星定位单元的计算压力,提升车载智能终端整体定位性能。
(四)地图匹配融合预处理
地图单元对卫星定位单元输出的原始经纬度信息进行匹配,在地图数据库逆向定位,读取当前位置点的地图信息,如经纬度、海拔信息,道路属性等,并结合当前车辆运动趋势预判拟合,输出车辆行进方向(北偏东为正)、前方岔路口的距离、匹配可行性度等信息,控制管理单元通过NMEA通信接口将地图匹配信息项输出至卫星定位单元。其中NMEA语句格式,可参考如下:
$GISMM,lon,lat,ati,heading,flag,fork,dis,resv*cc
卫星定位单元根据地图单元反馈的信息,对模块内部经纬度、方向、高度等位置信息向量计算进行校正修订,提升组合定位系统精度和性能[12]。其中地图单元的融合反馈数据格式如表2:
四、实验结果对比
经对比测试,本文所设计方案相对普通MEMS惯性传感器构成的捷联惯导系统方案,在水平精度和航向角测姿精度方面改善明显,卫星信号失效时间越长,定位效果表现更好,实验结果如表3所示。
五、 结束语
通过分布资源的组合利用,对多种辅助定位信息进行融合预处理,提高数据的精确度,反馈协助定位解算。其中卫星定位单元通过接收处理控制管理单元预处理输入的速度、海拔、方位、加速度、以及地图匹配单元的融合信息,参与位置辅助定位计算,不但可以降低环境因素对定位信号影响,缩短定位时间,改善定位精度,也可以降低卫星定位单元的中央处理器(Central Processing Unit, CPU)的运行负载压力,进而向控制管理单元输出更高质量定位数据。设计方案中,车载智能终端系统始终处于星历定位、多源校正、融合定位的闭环反馈系统中,定位精度将得到持续有效地提高。
作者单位:陈挺 厦门雅迅网络股份有限公司研发中心
参 考 文 献
[1]付潇.面向智能移动终端的多源信息融合定位关键技术研究[D].北京:北京邮电大学,2020.
[2] GB 15082-2008,汽车用车速表[S].
[3] O·弗里施, C·拉斯格伯, F·威克勒. 用于确定车辆的车速表特性曲线的设备和方法、用于调节车辆速度的系统以及车辆:, CN110914130A[P]. 2020.
[4]张楠, 王智, 王德伦. 基于运动微分方程与加速度的刚体运动姿态算法[J]. 机械设计与制造, 2021(10):6.
[5]刘成.气压高程约束定位方法.中国,202110446078.6[P],2021.04.25.
[6]张国强,谌炎辉,张茂盛.基于单片机的便携式高度测量仪的设计[J].现代电子技术,2018,41(22):83-86.
[7]宫晓琳,房建成, 盛蔚.一种GPS与高精度气压高度表在线互标定方法[J]. 电子与信息学报, 2009(4).
[8]袁宇翔, 邹斌. 高可靠性车载惯性传感器冗余配置方案优化技术研究[J]. 哈尔滨工程大学学报, 2018, 39(8):7.
[9]王思远,韩松来,任星宇,等.MEMS惯性导航技术及其应用与展望[J].控制与信息技术,2018(06): 21-26+49.
[10]Xia X, Xiong L, Liu W, et al. Automated Vehicle Attitude and Lateral Velocity Estimation Using a 6-D IMU Aided by Vehicle Dynamics 2018[C]. IEEE Intelligent Vehicles Symposium (IV). IEEE, 2018.
[11]徐偉民.基于驾驶员驾驶意图的换道轨迹预测研究[D]. 湖南大学.
[12]吕霞,郭宋静,陶留锋.移动GIS辅助定位系统终端设计及处理方法[J].测绘科学,2020,45(05):36-41.