基于simotion运动控制系统的轴限制功能
2022-05-30唐丙松

摘 要:simotion运动控制系统作为西门子较成熟的运动控制系统,能够根据设计者自定义添加工艺对象及多轴同步插补功能,较轻松地实现多轴同步高精度的运动控制。在运用过程中,需要工程师在控制系统中匹配适应的轴参数,对轴运动的诸如最大运动速度、静态误差、动态误差、扭矩幅值等进行限制,以实现运动控制的安全性及精准性,同时也能对所控制的轴实际状态做到实时监控。
关键词:simotion;运动控制;轴限制
中图分类号:TP311 文献标识码:A 文章编号:2096-6903(2022)07-0120-03
0 引言
在运动控制系统中,出于对设备及人员安全性的需要及对所控制的运动机构本身状态的监视,可以通过设置轴监视功能以达到设计要求。在轴使能后,如果轴的实际位置、实际速度与设定值之间的偏差超过预设的幅值,系统将自动产生相应的错误信息,并且伴随相应的安全响应,比如切断轴使能,让此处于错误状态下运动着的轴立即停止,以达到监视及安全设计要求[1]。如果这些安全幅值没有与实际机构相匹配,或者轴优化设置不理想,或者机械机构本身存在问题,系统将自行产生这些错误信息,并立即结束当前的运动状态。
1 定位监视
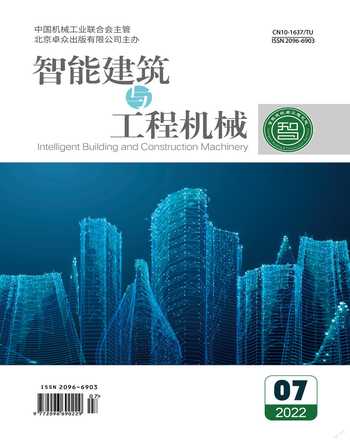
在进行轴定位操作时,位置设定值插补结束后,轴的实际位置开始被系统监视,此功能为定位监控。
位置设定值插补完成,图中position tolerance time開始计时。如果在此定位容错时间内,编码器反馈轴的实际值未进入定位窗口,系统将报错,轴也将相应的去使能,定位监视也随之结束。如果编码器反馈实际值进入定位窗口,图中minimun dwell time开始计时。如果在此最小停留时间内,轴实际位置重新离开定位窗口,则定位容错时间定时器将重新启动开始计时,重新监视定位容错。如果轴实际位置重新进入定位窗口,最小停留时间定时器将重新启动,在此时间内,轴实际位置未离开定位窗口,则系统变量motionStateData.motionCommand会变成MOTION_DONE,轴的定位监视功能随之结束,静态误差监视功能也将同时启动(如图1所示)。
2 静态误差监控
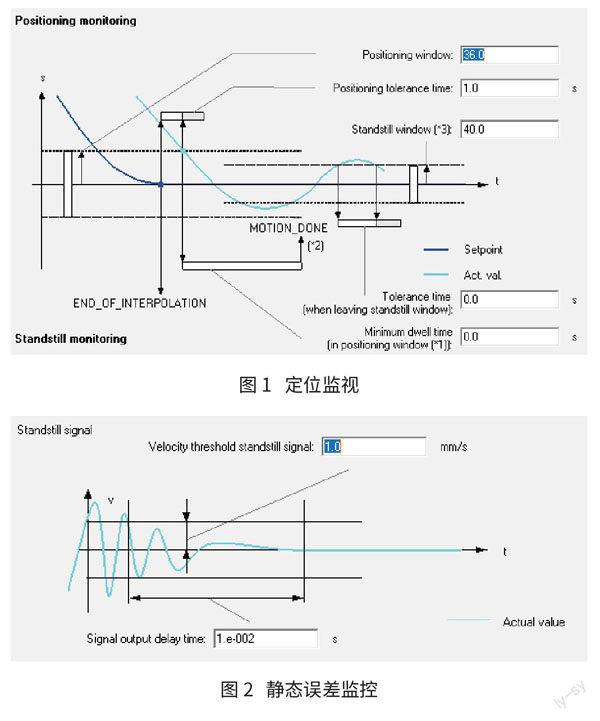
在轴已使能的情况下,如果没有执行定位指令,则零速监视功能一直处于激活状态。零速监视有一个零速监视窗口Standstill window和监视时间Tolerance time需要设置,如果实际位置离开了零速监视窗口,并超过了容差时间,系统将报错并伴随的去除轴使能。此功能主要应对轴停止状态下,受到外力的影响或机械装置本身的影响,无进给指令下轴位置发生偏移的情况,若系统及人员未识别此情况,就会存在机械碰撞或人员损伤的情况。一旦触发轴静态误差监视报警,轴将立即去使能(如图2所示)。
3 动态跟随误差监控
在进行定位的过程中,轴的实际位置必然滞后于设定位置,两者的偏差值会随着线速度的增加而增大。位置轴的动态跟随误差监视功能能够对这个偏差进行监视,一旦该偏差超过了预先设定的门限值,系统将自动报错并伴随的去除轴使能,使整个运动系统各个轴停止进给。在低于一个指定的速度Minimum velocity for dynamic following error monitoring时,跟随误差监视门值是一个常数Constant following error;在高于该速度时,监视门值与设定速度成线性关系,最大监视门值Maximum perm.Following error对应了最大速度设定值Max velocity.在工艺对象轴参数中,也可实时查看跟随误差值(如图3所示)。
4 速度偏差监视
速度偏差监视功能仅使用于速度控制方式下,比如速度轴或者位置轴在速度控制模式下的运动。当轴在速度控制方式下运行时,滤波后的轴实际速度与设定速度间的偏差超过一个门限值Maximum velocity deviation时,系统将自动报错并伴随的去除轴使能(如图4所示)。
5 安全限位限制
运动控制系统中的各个直线运动轴是有机械限位的,可以在系统中设置正/负软件限位位置或添加碰块开关设置正/负硬件限位来限制直线轴允许的运动范围。当轴到达预设的软限位位置后,此轴软限位生效方向的任何进给指令将不再生效,但反方向的进给指令不会受影响。当轴已经与安装的硬件限位开关发生碰撞时,系统将根据预设的动态响应参数停止运动,同时系统将产生硬件限位报警,轴使能也同时丢失,仅能在复位报警后,才允许轴向硬限位发生的反方向进给。为了提高硬限位设置的安全性,碰块开关最好使用控制器自带的输入输出接口,因其与控制器CPU之间为模块内部ProfiBus通信方式,响应更快,设置方式更简单,故障率也更低(如图5所示)。
6 扭矩限幅
扭矩限幅功能主要运用于通过挡块触碰停止的运动控制,或可能发生机械碰撞,又不便于添加软/硬限位的运动系统中。通过“_enableTorqueLimiting”系统功能块编程以定义轴扭矩限制,若设置“torqueLimitUnit”参数为“TORQUE”时,指定扭矩为电机侧,若设置为“DEFAULT_UNIT”时,指定扭矩为负载侧。
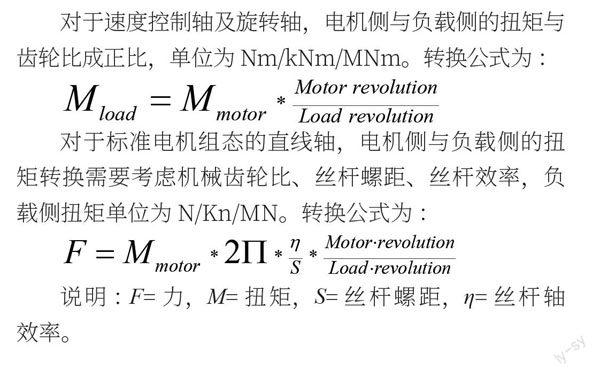
对于速度控制轴及旋转轴,电机侧与负载侧的扭矩与齿轮比成正比,单位为Nm/kNm/MNm。转换公式为:
对于标准电机组态的直线轴,电机侧与负载侧的扭矩转换需要考虑机械齿轮比、丝杆螺距、丝杆效率,负载侧扭矩单位为N/Kn/MN。转换公式为:
说明:F=力,M=扭矩,S=丝杆螺距,η=丝杆轴效率。
7 位置闭环控制
一般丝杆、齿条、蜗轮蜗杆等机械传动方式,本身都会有一定的机械间隙,当中间传动机构多了之后,间隙将逐级累加,这时候使用电机编码器来检测最终机械结构的的位置,必定会有一定的偏差,可以在最终机械结构上增加位置编码器,将此编码器设定为位置闭环的信号源,可以有效消除中间传动结构的机械间隙,增加运动控制的控制精度。
如图6中在SERVO_05驱动器的X202、X203口分别配置其电机编码器及外接编码器,将外接编码器设置为轴的第一编码器后,轴的位置将由此编码器来反馈,所有的静态监控、动态监控等也将由此编码器的信号主导。
工艺对象连同驱动装置中的控制器一起构成级联控制系统,最内侧的控制级联是电流控制,下一级联是速度控制,二者均位于驱动装置中,位置控制器是最外侧的级联。定位轴/同步轴的位置控制器是一个使用或不使用预控制速度的闭环P控制器,使用伺服增益系数设置比例作用控制器的增益。轴的机械状态越好,可以设置的位置环增益因数越大,跟随误差越小,动态响应也更快(如图7所示)。
8 结语
本文针对西门子SIMOTION运动控制系统中轴的多种安全限制功能进行了分析与阐述,正确地设置了轴限制安全参数能够对电机驱动的机械装置运行监控,在机械装置运行出现偏差或超过设计扭矩、行程等故障时能够自动识别并及时进入保护状态,从而避免装置及人员出现损伤情况。
参考文献
[1] 顾和祥.运动控制系统运用及实例解析[M].北京:机械工业出版社, 2021.
收稿日期:2022-05-05
作者简介:唐丙松(1987—),男,云南玉溪人,本科,工程师,从事铁路大型养路机械电气控制系统研发与控制工作。