二维轮廓设计与运动控制系统设计与开发
2017-03-25王泽龙黄发灯邱丹敏
王泽龙++黄发灯++邱丹敏
摘要:针对传统运动控制系统存在的系统结构复杂,运动控制方式交互性较差等问题,提出基于Windows的二维轮廓运动控制策略,构建2轴运动控制平台,设计并开发交互性友好的可快速创建二维轮廓、执行二维轮廓运动控制的人机界面,并通过平台运行验证所提方案的可行性和有效性。
Abstract: Based on problems such as complicated structure system, poor interaction of motion control modes existing in the traditional motion control system, this paper puts forward the 2D contour motion control strategy based on Windows, constructs two-axis motion control platform, designs and develops human-computer interface with friendly interactive, which can quickly create 2D contour, and perform 2D contour motion control, and through the platform operation, verifies the feasibility and effectiveness of the proposed scheme.
關键词:二维轮廓设计;运动控制;IPC
Key words: 2D contour design;motion control;IPC
中图分类号:TP273 文献标识码:A 文章编号:1006-4311(2017)08-0094-02
0 引言
传统的轮廓运动控制系统主要基于专用系统构建,需要较为专业的编程人员进行轮廓运动控制编程。桌面型运动控制系统的出现是运动控制平台方案的一大改革。但现有桌面型系统主要针对专用功能机器开发,通用性较窄。
Windows平台不仅具有良好的交互性,而且具有很好的开放性,利用基于Windows的运动控制卡,通过运动控制程序接口,能够快速实现桌面型的运动控制软件开发[1]。工业个人计算机(Industrial Personal Computer,IPC)除保留通用PC机的优点和功能外,在可靠性、抗干扰能力以及结构设计等方面更为可靠,在工业现场获得广泛的应用,并正不断地开拓新的应用领域和市场[2]。运用基于Windows的IPC不仅能够提供良好的交互界面,而且能够实现复杂、高效的数据计算。
因此,开发一种基于Windows的通用性桌面型运动控制平台,构建简洁明了的人机交互方式,实现通过界面快速精确生成复杂图形,进而控制并实现复杂图形的运控控制,对桌面数控系统的推广具有重要理论现实意义。
1 系统硬件搭建
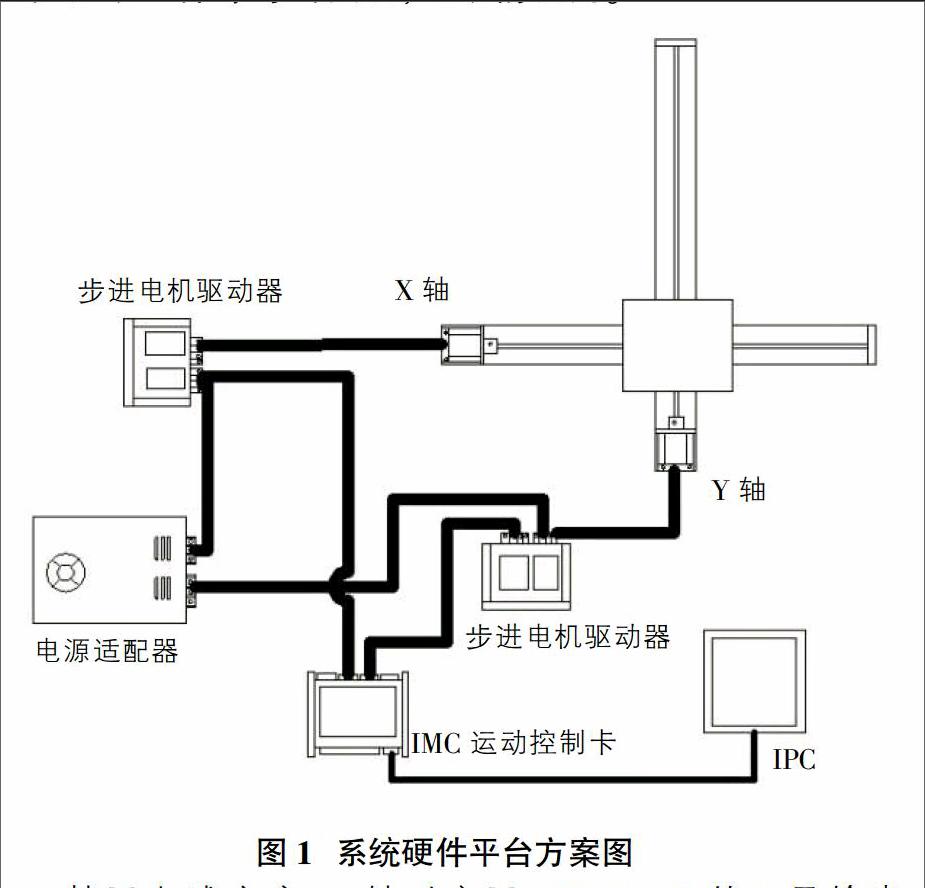
系统硬件平台方案如图1所示。硬件设计上,使用带触摸功能的IPC作为人机交互界面,并实现数据的转换和计算。采用通过RJ45网络接口传输数据的IMC3041E运动控制卡进行运动控制。控制信号由IMC3041E运动控制卡发送给X、Y轴的步进电机驱动器,进而驱动X、Y轴运动轴执行轨迹运动。与HMI比较,IPC具有可靠性,实时性,扩充性,兼容性的优点,能同时利用ISA与PCI及PICMG资源,并支持各种操作系统,多种语言汇编,多任务操作系统。IMC3041E集成运动控制运算单元,插补等所有控制算法由硬件处理,速度快、精度高,输出平滑,支持4轴输出;采用RJ45网络接口进行数据传输,通信环响应小至50uS,四级校验监控,响应速度高,可靠性强;输出模式差分/单端可选,可配置性强;共有16个全局开关量输入和16个开关量输出,可扩展性强高。运动平台采用步进电机驱动丝杆螺母副实现,运动精度高。
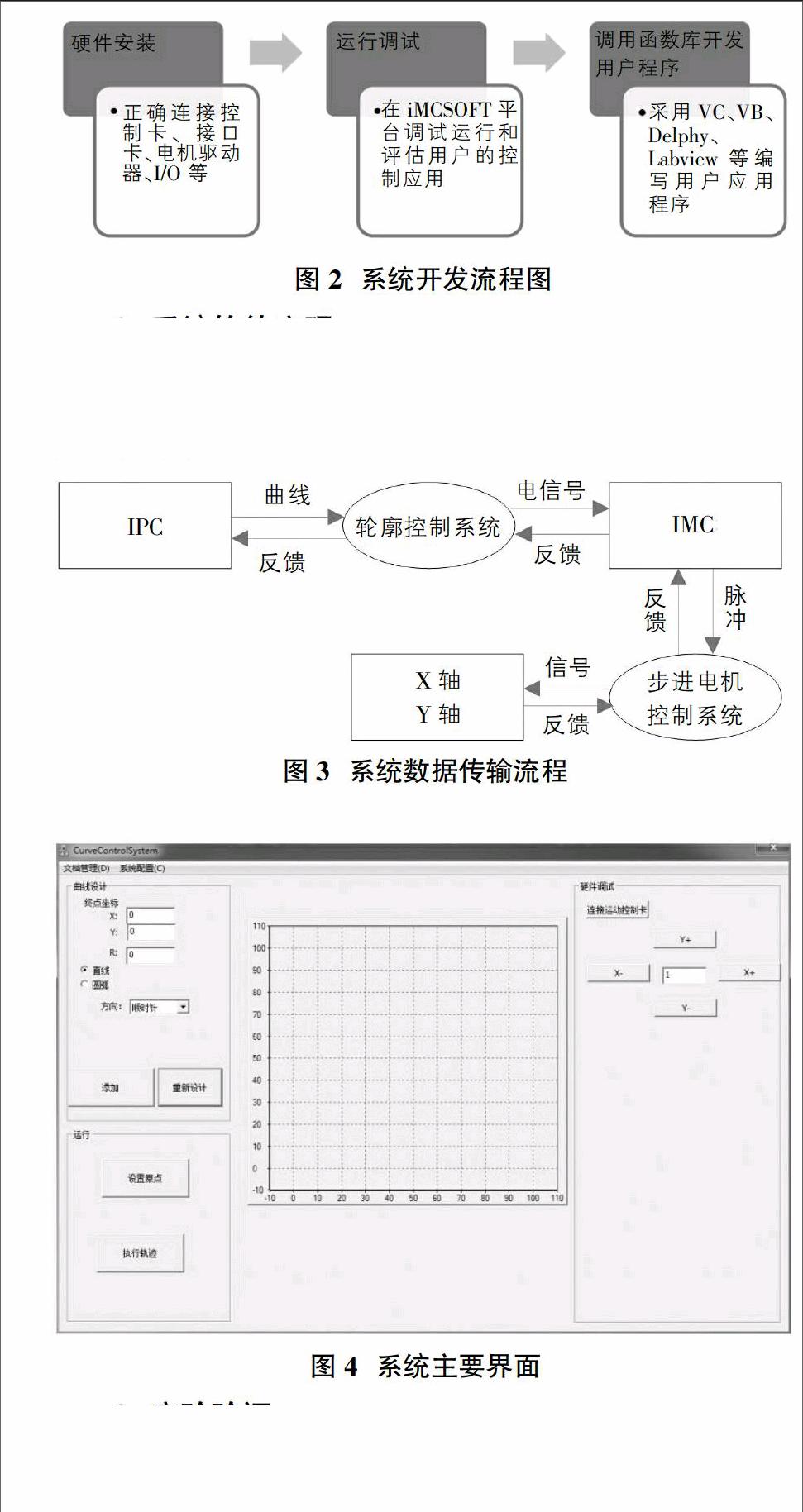
基于上述方案,X轴对应于IMC3041E的0号输出轴,Y轴对应于IMC3041E的1号输出轴,即可通过IPC上的软件实现X、Y轴的联动控制。为保证硬件平台的运动精度,硬件平台搭建后,通过IMC3041E自带调试软件对限位、急停、运动方向等进行调试。调试无误后,基于C++、VB等程序开发运动控制软件,并在软件中设定硬件平台的脉冲当量,即可实现对硬件平台的运动控制。系统开发流程图如图2所示。
2 系统软件实现
实现基于Windows的二维轮廓设计与运动控制平台,不仅要在硬件上达到要求,同时在数据的传输流程中也要达到一定要求。系统的数据传输流程如图3所示。通过IPC将操作者编辑的曲线图像命令数据传输到轮廓控制系统,轮廓控制系统将其转化为电信号传送至以IMC3041E运动控制卡。IMC3041E运动控制卡再以脉冲形式传输至步进电机驱动器,驱动步进电机的控制系统,实现X轴、Y轴的点位控制、直线插补、圆弧插补等运动及运动过程中的速度、加速度等。同时,为了保证各环节的正常、稳定进行,对所有的流程环节节进行反馈设置,保证整机系统有效高速的运行。
根据上述流程,开发二维轮廓设计与运动控制系统主界面如图4所示。界面包含曲线设计、运行、硬件调试、曲线显示4个功能区。曲线设计默认起始坐标为(0,0),通过输入终点坐标参数和曲线形状,能够自动快速生成曲线并实时显示曲线形状。曲线生成后,通过运行功能区的设置远点按钮将工作台运动起始点设置为远点后,点击执行轨迹即可使工作台按设计的曲线执行运动。
3 实验验证
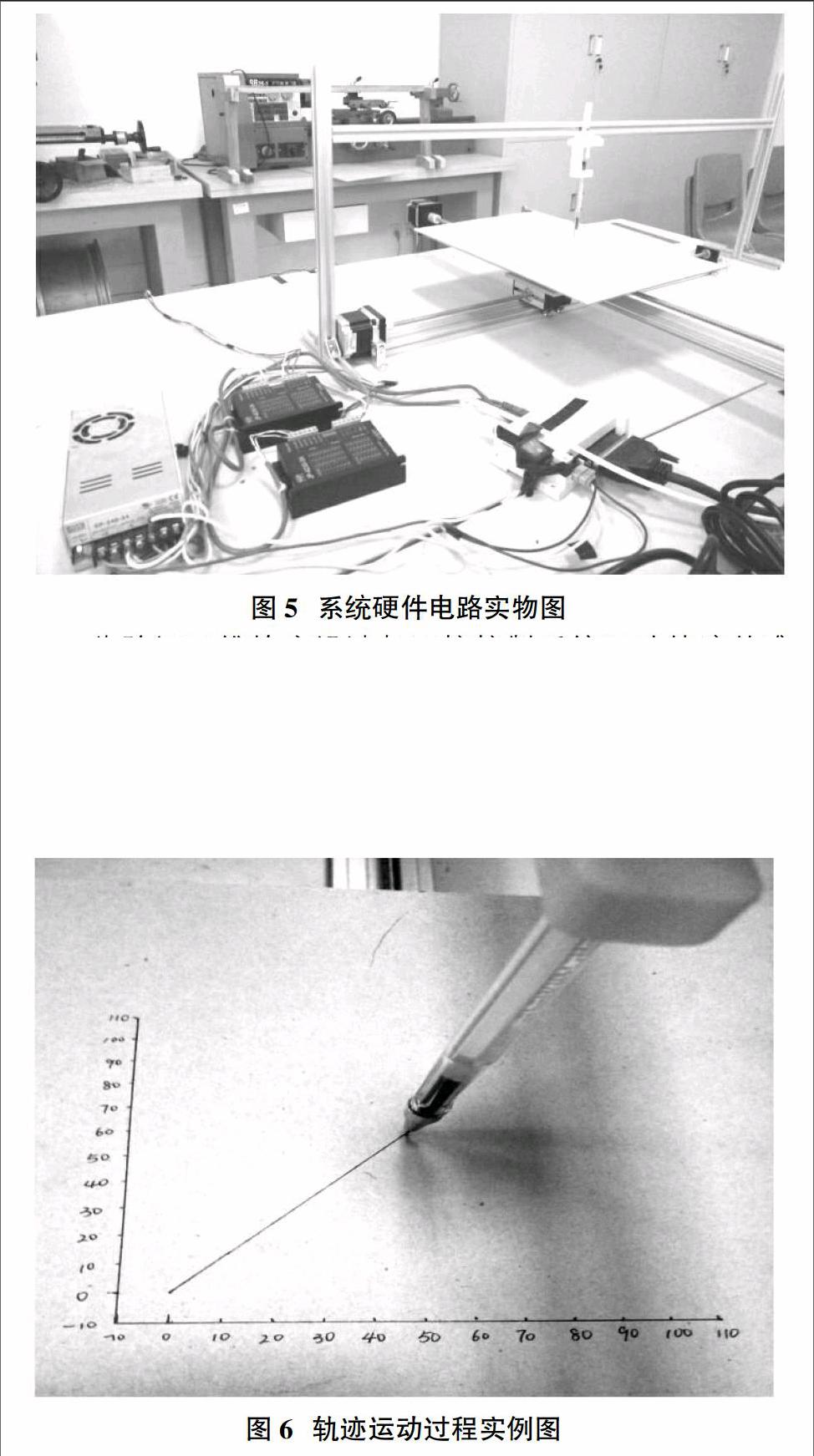
根据上述平台方案和软件方案,搭建二维轮廓设计与运控控制系统并进行软硬件联调。系统硬件电路实物图如图5所示。目前,系统的运动方式采用绝对坐标的运动方式,开始执行轨迹前,先将起始点坐标位置设置为原点,根据曲线上个点坐标执行插补指令,有效保证软件坐标系与硬件坐标系的统一。
为验证二维轮廓设计与运控控制系统运动轨迹的准确性,在平台上安装固定主轴,主轴轴端安装绘图笔。在界面设计运动轨迹曲线并设置运动起点为原点后,点击界面上的执行轨迹按钮,硬件平台即按给定轨迹进行运动。如图6为轨迹运动过程实例图。
4 结论
针对传统运动控制系统存在的系统结构复杂,运动控制方式交互性较差等问题,提出了基于Windows的二维轮廓运动控制策略,综合IPC、IMC3041E运动控制卡、步进电机驱动器、丝杆螺母直线运动轴构建了二维轮廓设计与运控控制系统,设计并开发交互性友好的人机交互界面,可快速创建二维轮廓、执行二维轮廓运动控制。在此基础之上,可以对该运动平台进一步的开发,如在Z轴增加一个可调焦的激光头,则可将系统改造为激光打标机。
参考文献:
[1]雷立群,于振文.基于Windows的全软件数控系统实现方法研究[J].机床与液压,2012,40(9):94-97.
[2]周宏.IPC应用探讨[J].科技展望,2016(20):146-147.
[3]宋利伟.基于GDI+的二维参数化草图技术的研究[D].西华大学,2007.
