地铁车辆径向转向架主动控制策略研究
2022-05-30穆晓军肖权益李振乾刘东坡
穆晓军,肖权益,李振乾,刘东坡
地铁车辆径向转向架主动控制策略研究
穆晓军1,肖权益2,李振乾2,刘东坡1
(1.北京轨道交通技术装备集团有限公司,北京 100028;2.西南交通大学牵引动力国家重点实验室,四川 成都 610031)
为使地铁车辆在保证直线稳定性的同时,又能改善曲线通过性能,本文阐述了主动径向转向架的导向机理,并基于多体动力学建立了主动径向转向架联合仿真模型,从理论角度研究了基于冲角的径向线控制策略和基于纵向蠕滑力的纯滚线控制策略,从工程实用角度研究了基于二系回转角和线路信标的相对摇头角控制策略,对比论证了工程控制策略的可行性。研究结果表明:与传统转向架相比,主动径向转向架能够在车辆通过曲线时,控制轮对趋于径向线位置,大幅提高曲线通过性能;采用不同控制策略均可以显著减小轮对冲角,改善轮轨磨耗。
地铁车辆;主动径向转向架;控制策略
为了进一步提升转向架在复杂线路条件下的适应性,主动控制系统越来越受到关注。主动径向转向架不仅可以解决传统转向架曲线通过性能与直线稳定性的矛盾,还可以改善轮轨之间的磨耗,延长车辆和轨道系统的维护周期并降低车辆运营成本[1-3]。不同于常规径向转向架,主动径向转向架的核心在于制定控制策略。合理的控制策略不仅应该能在兼顾转向架直线稳定性和曲线通过性能的同时实现最佳的径向效果,减小轮轨磨耗并降低滚动接触疲劳,还应具有较高的工程化实用价值。因此,深入研究主动径向转向架控制策略具有重要意义。
相关学者针对主动径向转向架控制策略开展了一系列研究并取得了一些成果。MEI等[4]对采用不同结构和控制策略的主动径向转向架作了全面综述,并对比了不同结构的优缺点。Perez等[5]研究了轮对摇头力矩控制、轮对相对摇头角控制和纯滚线轮对横移控制三种不同的策略对车辆曲线通过性能的影响。Braghin等[6]以抗蛇行减振器作为主动控制器进行动力学仿真,对于直线运行和曲线通过两种工况提出了不同的控制策略。沈钢等[7]提出一种将轴箱拉杆作为主动控制器的控制方法,通过对轮对施加摇头力矩闭环控制来实现主动控制。
本文以某A型地铁车辆为研究对象,基于多体动力学建立主动径向转向架的联合仿真模型。从理论研究和工程应用的角度分别提出两种控制策略,并进行动力学仿真以评价各控制策略的优劣及可行性,以期为主动径向转向架的应用提供参考。
1 主动径向转向架导向机理
主动径向转向架是一种基于控制技术的转向架,它通过安装在转向架上的作动器,推动导向机构带动轮对或直接作用于轮对,使前后轮同时处于径向位置。为使作动器在合适的时间动作、达到较为理想的导向效果,其控制策略必须与线路曲线相匹配。
主动径向转向架根据主动导向机构形式的不同可分为杠杆式和作动器直接作用式两类。
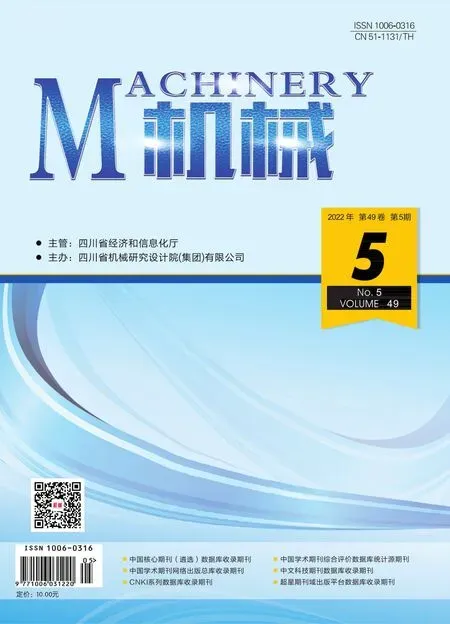
杠杆式主动径向转向架如图1所示,其径向原理是,当车辆通过曲线时,控制器控制作动器动作,作动器输出位移并借助杠杆机构将此位移传递给轮对,从而使轮对处于径向位置。优点是可以利用杠杆机构减小作动器输出力,便于作动器的小型化设计,缺点是杠杆机构会导致转向架结构更为复杂,并增加转向架的质量,同时,杠杆机构在运营服役过程中会产生磨耗和间隙进而影响后续的径向效果。
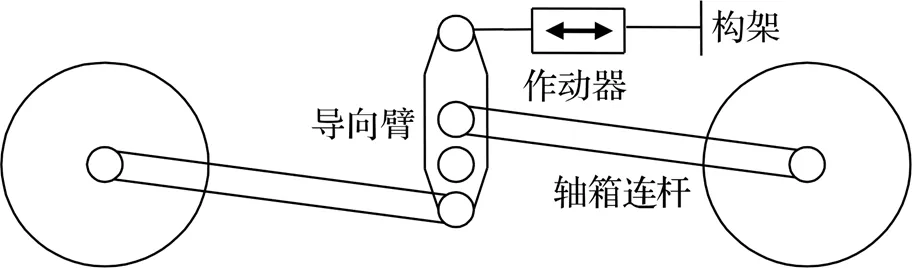
图1 杠杆式主动径向示意图
直接作用式主动径向转向架的径向原理是,将控制器控制的作动器位移直接传给轮对而使轮对处于径向位置,无需通过复杂的传递机构。直接作用式主动径向转向架有多种实现方案:①可以将控制器安装在轮对横向以控制轮对横移,但这样施加的作用力会作用到转向架构架和车体上,从而引起运行平稳性的恶化;②通过作动器施加摇头力矩的方式来迫使轮对趋于径向,如图2所示,在轮对两侧布置两个作动器,轮对绕轮对中心转动时,其单个作动器输出位移可以减小一半,同时,当某侧作动器发生故障时,另一侧的作动器还可以动作使轮对回归无转角的正常位。
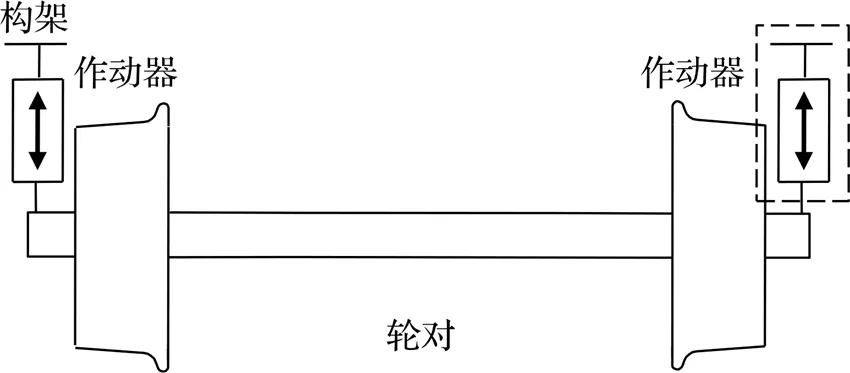
图2 作动器直接作用式主动径向示意图
综合考虑各种结构的优劣,本文采取两侧纵向布置作动器以施加摇头力矩的主动径向方案。其主要结构是在轮对左右两侧各纵向设置一个作动器,作动器连接构架与轴箱。在车辆进入曲线时,曲线外侧作动器活塞杆伸出,曲线内侧作动器活塞杆缩回,通过施加一个摇头力矩迫使轮对趋于径向位置。而当车辆在直线上运行时,作动器则处于锁死状态。
此外,为了减小主动径向机构对转向架结构的改变,将作动器与转臂轴箱并联以实现一体化的设计。为减小作动器的输出力,大幅降低转臂节点一系纵向定位刚度,改由作动器两端节点径向串联刚度提供一系纵向刚度(作动器节点径向串联刚度取10 MN/m)。因此,在直线运行时,主动径向转向架作动器锁死成为二力杆,与传统转向架的一系纵向定位刚度相当,有着良好的直线稳定性;而在曲线运行时,作动器的输出力需要平衡转臂节点纵向复原力、一系弹簧纵向复原力以及纵向蠕滑力。由于转臂节点纵向刚度大幅降低,使得作动器所需输出力大幅减小,从而有利于作动器的小型化与轻量化。
2 动力学模型建立
基于动力学仿真软件Simpack,建立主动径向转向架地铁车辆的多体系统动力学模型。主动径向转向架地铁车辆模型主要由1个车体、2个转向架构架、4个轴箱轮对装置以及主动径向机构等构成。地铁车辆的车轮采用LM踏面,钢轨采用CN60轨,其余主要参数如表1所示,在建模过程中充分考虑悬挂系统和轮轨接触的非线性特征。车辆动力学微分方程为[8]:

式中:、、分别为质量、阻尼以及刚度矩阵;为广义坐标列向量;为轮轨力向量。

表1 转向架主要技术参数
主动径向转向架的径向机构由前后轮对左右两侧共四个作动器组成。作动器通过两端的节点分别与轴箱、构架相连接。控制器的实时输入位移通过移动作动器两端的力元来实现。控制器的实时输入位移大小由控制策略决定。采用Simpack与Simulink联合仿真的方式,将控制策略和动力学模型构建成一个完整的闭环,如图3所示。

图3 Simpack-Simulink联合仿真示意图
当车辆进入曲线时,通过曲线识别技术或测量需要的轮轨参数实时获取作动器作动信号,经滤波后传给控制器模块,并根据控制策略计算出作动器所需作动位移,控制器进而控制作动器产生相应位移,迫使轮对在曲线上趋于径向位置。即Simulink从Simpack中实时获取车辆运行速度和曲线信息或轮轨参数,识别车辆在曲线上的位置,并计算出作动器需要输出的位移,然后Simulink将处理后的输出位移传递至Simpack中进行动力学计算。
3 主动径向控制策略
3.1 基于理论研究的控制策略
3.1.1 基于冲角的径向线控制
基于冲角的径向线控制策略如图4所示,控制目标是实现前后轮对冲角都为零,即1=2=0。该控制策略以冲角为反馈量实现闭环反馈控制,通过给轮对施加摇头力矩使得轮对冲角为零,迫使轮对在曲线上处于径向位置,从而降低横向蠕滑力和磨耗。
图4 基于冲角的径向线控制示意图
轮对冲角是反映该控制策略径向效果的关键指标,但冲角不容易直接测出,目前都是采用间接测量或状态估计的方法才能实时获取。Mei等[9]利用3个加速度计和5个陀螺仪结合卡尔曼滤波技术对车辆的冲角等状态变量进行了估计;孙效杰等[10]提出基于状态观测器的信息估计技术,通过测量轮对横向加速度和摇头速度实现了对冲角的估计。马增强[11]等提出一种通过车载相机获取轮对冲角的图像检测方法。
虽然目前对于冲角的精确测量存在着一定的困难,但实时获取冲角切实可行,因此从理论研究的角度出发,通过仿真计算实现实时获取冲角并进行主动控制。
在车辆进入曲线时,以冲角作为反馈量计算出作动器所需实时输出的位移,由控制器控制作动器动作,给轮对施加摇头力矩迫使轮对呈外八字展开趋于径向位置。导向轮与跟从轮单独控制的双轮对控制策略由于作动器输出位移不匹配就会给构架额外施加一个摇头力矩,从而带动轮对偏离纯滚线,因此,采用单轮对控制策略、以导向轮冲角为零作为控制目标,非导向轮侧输出的位移与导向轮一致,即一个转向架的四个作动器输出位移相同,故不会给构架额外施加摇头力矩。
仿真线路设置半径500 m、超高120 mm的曲线,车辆在无轨道不平顺激励下以速度 70 km/h通过该曲线,如图5所示。可知,与传统转向架相比,在单轮对控制策略下,导向轮与跟从轮的冲角在圆曲线上明显减小且接近于0,导向轮已经基本处于完全径向位,跟从轮冲角比导向轮略大,但最大值不超过0.65 mrad;导向轮、跟从轮横移量分别减小至-3.77 mm、-3.70 mm,均处于纯滚线附近;导向轮磨耗指数从传统转向架的最大值256 N减小至3.39 N,轮轨磨耗得到了极大缓解。
3.1.2 基于纵向蠕滑力的纯滚线控制
理想的曲线通过方式是轮对在曲线上纯滚动,纯滚动可以消除纵向蠕滑力,从而减小磨耗。根据文献[12]得:
纯滚线控制需要实时获取的曲线半径、轮对横移量和等效锥度,测量难度很大。相对而言,纵向蠕滑力的估计更容易实现。Ward等[13]提出在转向架和轮对上布置一组惯性传感器并使用卡尔曼-布西滤波器可估计蠕滑力。因此,采用基于纵向蠕滑力的纯滚线控制策略的核心是通过作动器输出位移给轮对施加摇头力矩,使轮对纵向蠕滑力为零。
如图6所示,与单轮对冲角控制策略相比,在纵向蠕滑力控制策略下,前后轮对冲角在圆曲线上时虽然有轻微增大,但其横移都缩小至-3.67 mm左右,即横移基本完全位于纯滚线附近;两种控制策略下的轮对磨耗指数相当,在圆曲线上基本没有磨耗,在缓和曲线段产生很小的磨耗。
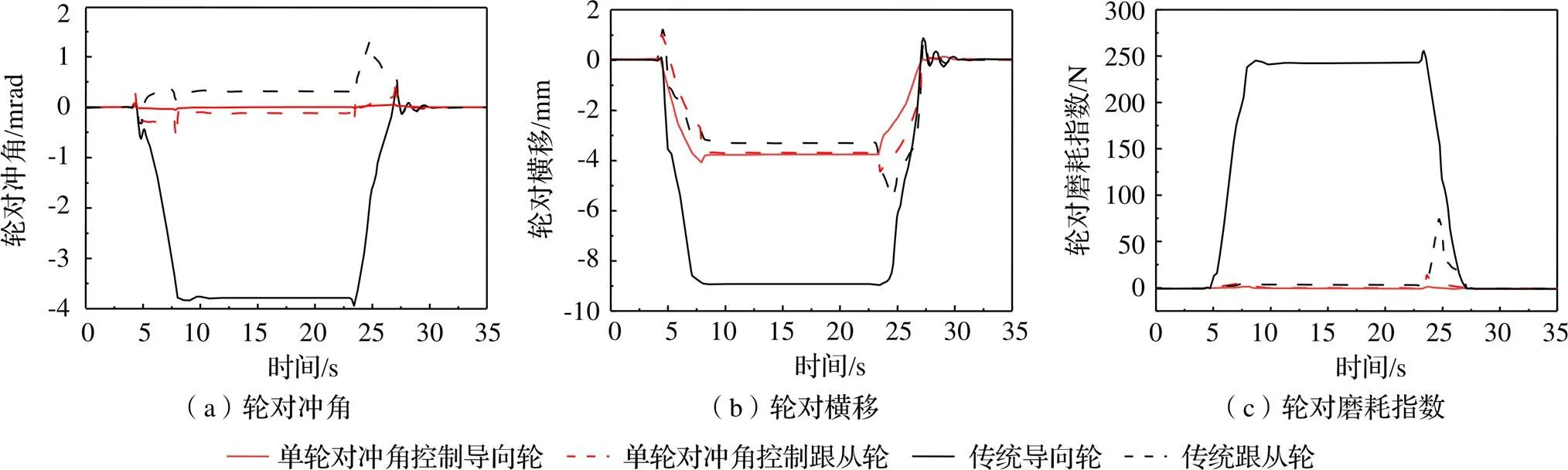
图5 基于单轮对冲角控制策略的主动径向转向架与传统转向架的R500曲线通过性能
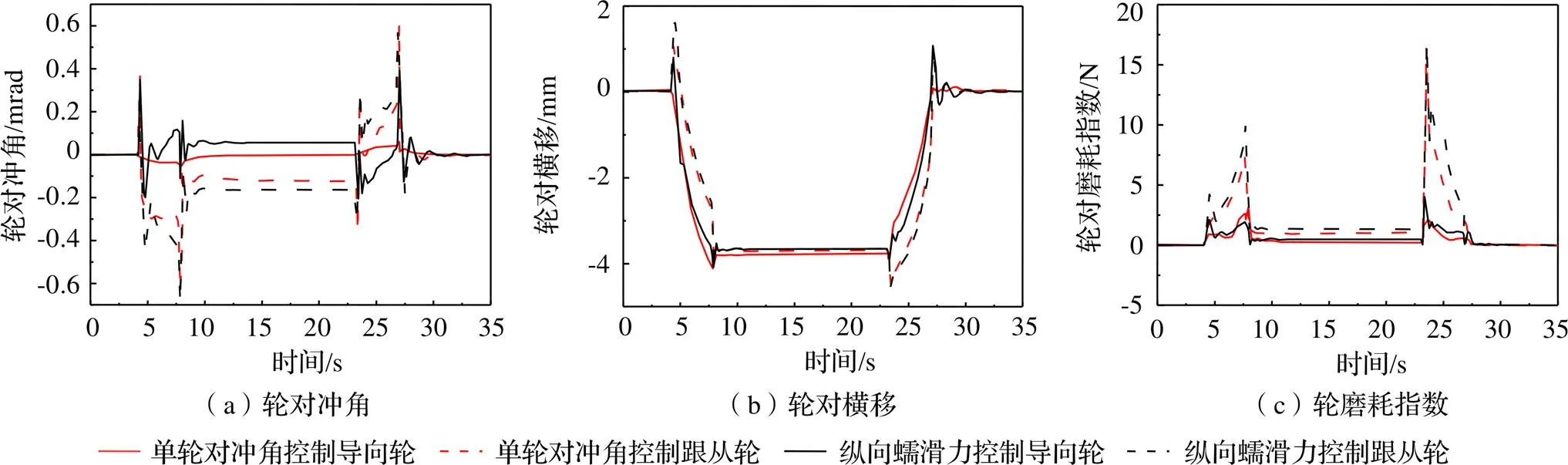
图6 基于纵向蠕滑力控制策略和单轮对冲角控制策略下的R500曲线通过性能
3.2 基于工程化应用的控制策略
在理论研究中提出的控制策略,为了实现主动径向转向架的径向效果,往往需要大量的传感器去测量或估计轮对冲角、纵向蠕滑力等状态参数,从而使其难以在工程实际中得到应用。因此有必要从提高工程化价值的角度出发,提出既易于实现又与理论控制相当的主动径向控制策略。
通过实时获取线路的曲线参数,以曲线半径、车辆运行速度及车辆运行位置作为输入信号控制作动器的动作,从而迫使轮对趋于径向位置。相比于冲角或纵向蠕滑力的测量,曲线感知技术在工程应用上更加成熟。目前,曲线检测技术种类繁多,总体可以分为车载实时检测和外部定位两种。
针对这两种曲线检测技术,提出两种相应的控制策略。
3.2.1 基于二系回转角的相对摇头角控制
目前,车载实时检测曲线半径主要还是基于车辆姿态与轨道线路之间的关系得到。可以通过车体与转向架之间的相对回转角感知曲线,有:
但以上方法一定程度上忽视了车辆长度引起的几何惯性效应,导致测出的实际曲率往往滞后于线路真实曲率。基于此,针对二系回转角测曲率方法进一步采用修正后的公式[14]为:
在动力学模型中添加二系回转角及二系回转角速度的传感器,以车辆按70 km/h速度通过半径500 m的无轨道不平顺激励的曲线为例进行动力学计算。所测得的曲率如图7所示。二系回转角修正前的公式测出的曲率虽然跟随性较好,但存在约为半个定距的滞后;修正后的公式很大程度上解决了滞后问题,其最大误差仅出现在缓直点上,且误差很小、在接受范围内。
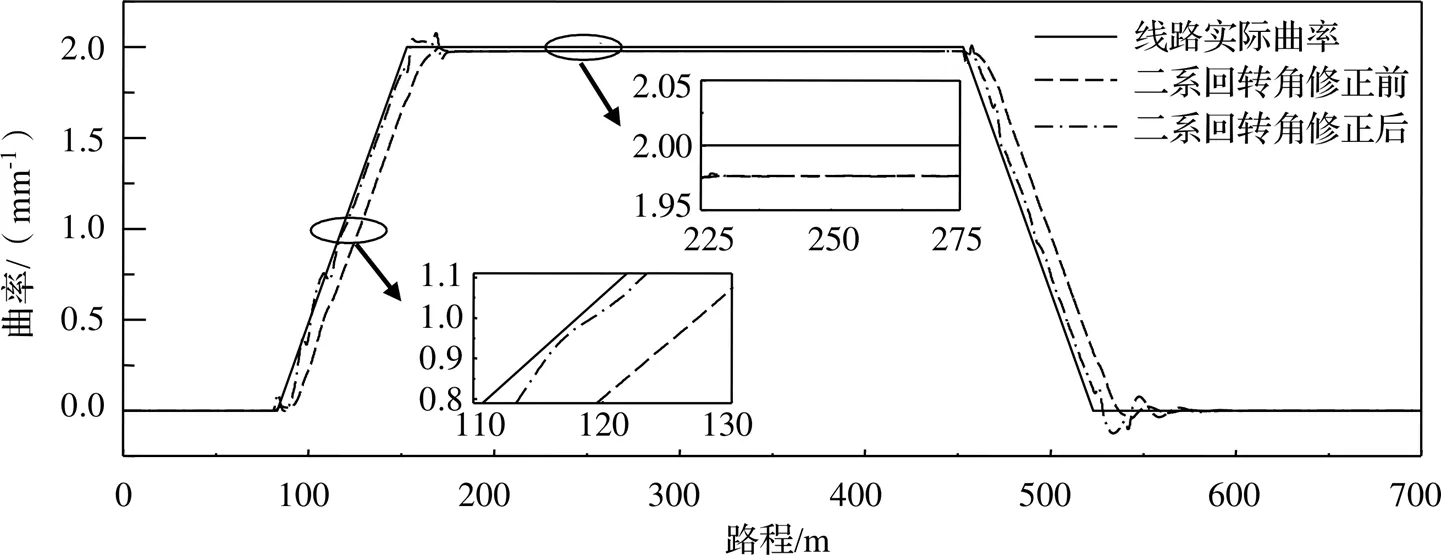
图7 二系回转角测量曲线曲率结果
基于二系回转角的相对摇头角的控制策略,其基本思想是转向架前后轮对冲角相等,即1=2。相等的冲角使轮对产生相等的横向蠕滑力以平衡曲线离心力。作动器输出位移使导向轮与跟从轮反向摇头,进而使相对摇头角为零。每个轮对单独控制,左右侧作动器输出位移反向,有:
当车辆运行在缓和曲线上时,由于缓和曲线长度远大于轴距,则认为其对应的曲线半径为转向架中心处的曲线半径。只需在头车前后转向架安装一个回转角度传感器,就可实时计算曲线曲率,进而计算出作动器需输出的位移。
仿真线路仍设置半径500 m、超高120 mm的曲线,车辆在无轨道不平顺激励下以速度 70 km/h通过该曲线,如图8所示。可知,采用基于二系回转角的相对摇头角控制策略,相比传统转向架,圆曲线上的轮对冲角大幅度降低,导向轮冲角由-3.783 mrad减小至-0.084 mrad,跟从轮冲角由0.315 mrad变为-0.058 mrad;导向轮轮对横移减小,处于纯滚线附近;导向轮磨耗指数最大值由256 N减小至41 N,跟从轮磨耗指数最大值由77 N减小至24 N,极大改善了轮轨磨耗问题。
3.2.2 基于线路信标的相对摇头角控制
基于线路信标的相对摇头角控制策略的基本思想依然是转向架前后轮对冲角相等,以使横向蠕滑力相等。
不同的是,曲线信息的获取不需要测量二系回转角与二系回转角速度,而是通过车辆定位技术,并在线路上安设信标实现。当车辆运行至信标位置时,控制器能实时接收曲线半径、曲线长度及车辆运行速度等信息,从而更加精准地对各个轮对进行径向控制。
设置半径500 m、超高120 mm的曲线,车辆在无轨道不平顺激励下以速度70 km/h通过该曲线,如图9所示。可知,相比于基于二系回转角的相对摇头角控制策略,基于线路信标的相对摇头角控制策略由于输入的控制信号更为准确,其导向轮冲角略微减小,跟从轮冲角略微增大,真正意义上实现相对摇头角为零的控制目标。导向轮磨耗指数最大值由41.78 N减小至7.77 N,跟从轮磨耗指数的最大值由23.82 N减小至20.75 N。
为进一步论证工程化应用的控制策略的可行性,将其与理论研究的控制策略进行对比分析,如图10所示。可知,基于理论研究的控制策略总体上优于工程化的控制策略。线路信标控制策略基本与理论研究的径向线策略相当,基于二系回转角的控制策略虽然曲线通过性能略差,但工程应用价值更高。
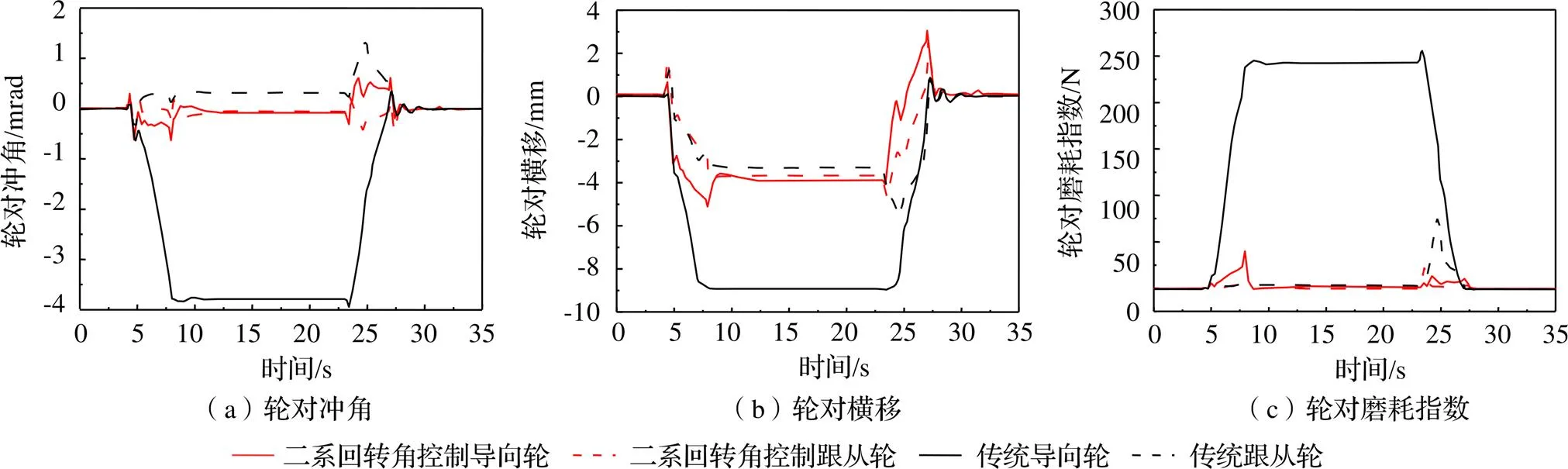
图8 二系回转角主动径向控制与传统转向架曲线通过性能

图9 基于二系回转角的相对摇头角控制策略与基于线路信标的相对摇头角控制策略曲线通过性能
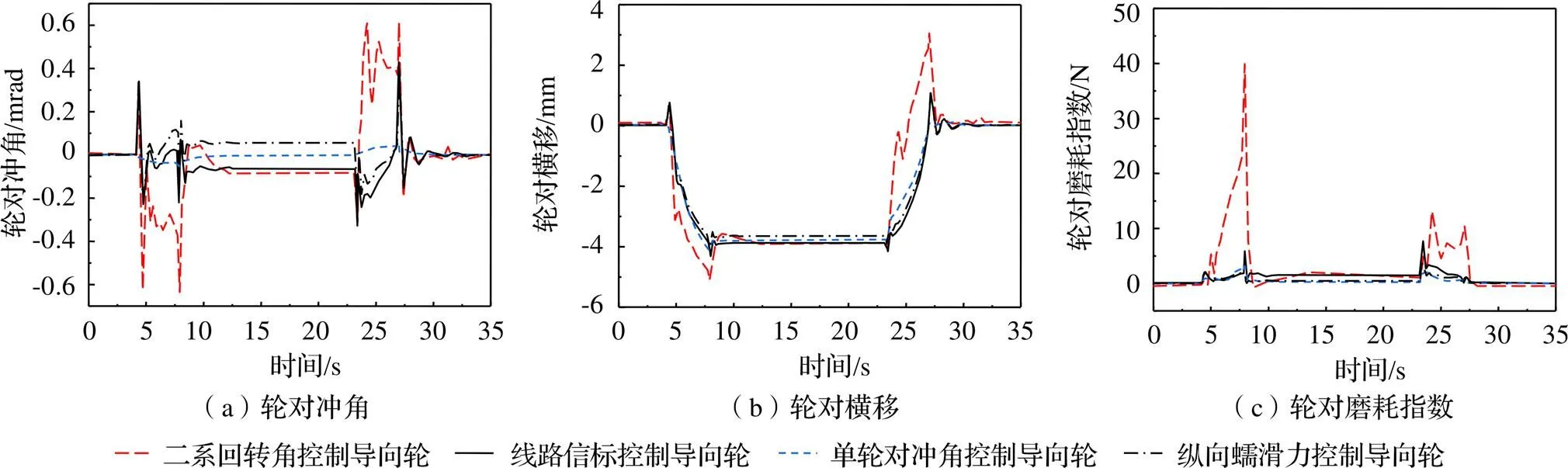
图10 工程控制策略与理论控制策略曲线通过性能
4 结论
基于多体动力学建立了主动径向转向架地铁车辆的Simpack与Simulink联合仿真模型,从理论研究的角度对比分析了基于冲角的径向线控制策略和基于纵向蠕滑力的纯滚线控制策略,并从工程应用的角度对比分析了基于二系回转角的相对摇头角控制策略和基于线路信标的相对摇头角控制策略。
从仿真结果可见:
(1)相比于传统转向架,采用不同策略的主动径向转向架均能够显著减小轮对冲角、改善轮轨磨耗,使轮对以径向位置通过曲线。不同策略所需要的输入量和基本思想虽然不同,但控制效果差别较小。
(2)采用导向轮冲角为零、前后作动器输出一致的单轮对冲角控制策略能够使轮对趋于径向位置,进而改善轮轨磨耗。基于纵向蠕滑力的纯滚线控制策略可以使前后轮对纵向蠕滑力矩为零,并在曲线上产生相同的横向位移以实现纯滚动,其在改善磨耗方面可以取得和冲角控制类似的效果。
(3)采用相对摇头角控制策略可以使得前后轮对产生相等的横向蠕滑力,从而保证良好的曲线通过姿态,相较于二系回转角获取控制信号的方式,采用线路信标的方式可以进一步提升缓和曲线上的动力学性能。
(4)基于二系回转角的相对摇头角的工程控制策略切实可行,不仅能提升主动径向转向架的实际运用价值,还能取得和理论控制策略相当的导向效果。
[1]TIAN S,LUO X,REN L,et al. Active steering control strategy for rail vehicle based on minimum wear number[J/OL]. Vehicle System Dynamics,2020.
[2]MOLATEFI H,HECHT M,BOKAEIAN V. Stability and safety analysis of an active steering bogie according to EN 14363 standard[J]. Journal of the Brazilian Society of Mechanical Sciences and Engineering,2017,39(8):2945-2956.
[3]樊庆宇,池茂儒,梁树林,等. A型地铁转向架动力学仿真及滚振试验性能研究[J]. 机械,2021,48(6):27-34..
[4]MEI T X,GOODALL R M. Recent development in active steering of railway vehicles[J]. Vehicle System Dynamics,2003,39(6):415-436.
[5]MEI T X,GOODALL R M. Recent development in active steering of railway vehicles[J]. Vehicle System Dynamics,2003,39(6):415-436.
[6]BRAGHIN F,BRUNI S,RESTA F. Active yaw damper for the improvement of railway vehicle stability and curving performances:simulations and experimental results[J]. Vehicle System Dynamics,2006,44(11):857-869.
[7]沈钢,赵惠祥. 主动转向式转向架的理论研究[J]. 上海铁道大学学报,1997(2):13-19.
[8]楚永萍. 摆式客车自导向径向转向架及性能[J]. 铁道车辆,2002(5):27-32.
[9]MEI T X,GOODALL R M,LI H. Kalman filter for the state estimation of a 2-axle railway vehicle[C]. 1999 European Control Conference (ECC). New York:IEEE,1999:2431-2435.
[10]孙效杰,杨俊起. 轨道车辆轮对状态与线路特征的估计[J]. 西南交通大学学报,2017,52(3):600-606.
[11]马增强,宋子彬,王永胜. 车载式相机轮对冲角图像检测[J]. 中国图象图形学报,2018,23(3):418-427.
[12]罗仁,石怀龙. 铁道车辆系统动力学及应用[M]. 成都:西南交通大学出版社,2018.
[13]WARD C P,GOODALL R M,DIXON R,et al. Adhesion estimation at the wheel–rail interface using advanced model-based filtering[J]. Vehicle System Dynamics,2012,50(12):1797-1816.
[14]田师峤,罗湘萍,任利惠,等. 基于地铁车辆二系回转角的主动径向研究[J]. 机械工程学报,2018,54(24):147-153.
Control Strategy of Metro Vehicle Active RadialBogie
MU Xiaojun1,XIAO Quanyi2,LI Zhenqian2,LIU Dongpo1
( 1.Beijing Rail Transit Technology Equipment Group Co.,Ltd., Beijing 100028, China; 2.State Key Laboratory of Traction Power,Southwest Jiaotong University, Chengdu 610031, China )
This paper explores the control strategy of metro vehicle active radial bogie in order to ensure the linear stability and improve the curve passing performance of metro vehicles. The guiding mechanism of active radial bogie was described and the co-simulation model of active radial bogie was established based on multi- body dynamics. The radial line control strategy based on wheelset attack angle and the pure roll line control strategy based on longitudinal creep force were discussed. The control strategies of relative yaw angle based on the yaw angle of secondary suspension and line beacon were studied from the perspective of engineering application. Engineering control strategies were compared and the feasibility was demonstrated. The results show that compared with the traditional bogie, the active radial bogie can control the wheel set to the radial line position when the vehicle passes through the curve, and greatly improve the curve passing performance. Different control strategies can significantly reduce both the wheel offset angle and the wheel rail wear.
metro vehicle;active radial bogie;control strategy
U260.2
A
10.3969/j.issn.1006-0316.2022.05.008
1006-0316 (2022) 05-0047-08
2021-08-20
穆晓军(1982-),男,山西平定人,工学硕士,高级工程师,主要从事轨道车辆转向架设计工作,E-mail:muxiaojun@rtte.cn;肖权益(1996-),男,四川达州人,硕士研究生,主要研究方向为轨道车辆系统动力学;李振乾(1999-),男,甘肃陇西人,硕士研究生,主要研究方向为轨道车辆系统动力学;刘东坡(1987-),男,河北遵化人,工程师,主要从事轨道交通转向架相关设计工作。