一种新型便携式智能拐杖的设计
2022-05-30吴代坤余均杰廖文凯徐利强冯琦余霖坤达志伟
吴代坤,余均杰,廖文凯,徐利强,冯琦,余霖坤,达志伟
一种新型便携式智能拐杖的设计
吴代坤1,余均杰1,廖文凯1,徐利强1,冯琦1,余霖坤1,达志伟2
(1.中铁通轨道运营有限公司,浙江 温州 325000;2.西安万威机械制造股份有限公司,陕西 西安 710065)
分析拐杖使用人群的特点和各种影响因素,设计了一种新型拐杖。该拐杖首先从传统单调的机械式拐杖结构入手,在使用时采用三轮底座结构,保证了整体的稳定性;其次,在不使用时可以将轮毂收起来;再次,通过控制系统设计,使用者的使用可以更加便捷。本设计加入了电驱动和座椅功能,主要包括拐杖的座椅、行走功能、转向机构的设计,以及主要零部件的选型和控制系统的设计,并进行了可靠性分析,最终得到一种新型便携式智能拐杖辅助行走工具。
拐杖;电驱动;转向机构;便携式
随着社会的日益发展,人口老龄化问题愈加严重。跌倒是造成65岁以上老年人受到意外伤害的主要原因。调查研究表明,在65岁以上老年人中,每年都有30%~40%的人至少跌倒一次;在跌倒的病人中有20%~30%的患者发生了严重的并发症,例如骨折或外伤等,病人的康复特别困难[1]。所以对辅助老人行走的便携式工具进行设计与研究很有必要。
1 总体结构
便携式智能拐杖主杆由上部、中部、下部组成。上部是沿用传统拐杖把手,主要用于手扶及控制开关等;中部是放置蓄电池的地方,提供拐杖的主要电源;下部是最重要的转向结构,转向结构和拐杖主杆利用联轴器连接。
当使用者疲劳时,可以利用本工具载着自己走,不再需要自己行走,本工具提供一个舒适的座椅,以更好地保证老龄人的安全。
如图1所示,便携式智能拐杖的结构包括手柄,手柄上连接有支撑柱,支撑柱的一端通过转向结构连接支撑座,支撑柱的一侧铰接座椅,座椅能在竖直平面内转动。座椅的底面设置有支撑杆,支撑杆一端和座椅铰接,支撑杆的另一端设置有滚轮,滚轮上设置有驱动滚轮运动的驱动机构。支撑杆和支撑柱之间设置有伸缩结构,伸缩结构的一端和支撑柱铰接,另一端和支撑杆铰接。支撑座的周向开设有槽缝,槽缝内穿设有与两个端部相邻且铰接的轴,轴背离铰接端的端部上设置有滚轮,支撑座上设置有辅助滚轮抬起的悬挂结构。支撑柱上设置有驱动悬挂结构、辅助滚轮抬起的驱动结构。
2 座椅机构
座椅的支撑柱上部设置有空腔,空腔内设置有驱动座椅转动的驱动结构,如图2所示。
座椅机构主要组成如下:
(1)电动推杆部分:由驱动电机、推杆、滑座、弹簧、减速齿轮、螺杆、螺母导杆、外壳及涡轮、微动开关等组成,具有节能环保、性能可靠、动作灵敏、运行平稳、推拉力相同、环境适应性较好等特点,且体积小、自锁性能好、完全同步、精度高、电机直接驱动,不需要管道的气源、油路。主要工作原理为,经齿轮减速后,带动一对丝杠螺母,利用电机的正反转完成推杆动作,把电机的旋转运动变成直线运动,实现座椅的放下和收起。
(2)座椅部分:由旋转轴座、座椅椅面、卡扣、旋转轴套等组成。座椅以旋转轴座为旋转中心实现收放功能,卡扣主要是当拐杖收起时卡住后轮、不让其随意摆动,后驱动轮主要通过旋转轴套支撑在座椅上,并可以旋转。整体结构是利用三角形支撑,所以主要支撑受力都在座椅上,这是选择后驱动轮式的主要原因,其具有良好的平稳性。
(3)连接部分:电动推杆和座椅主要是通过一个C型导轨连接在一起,电动推杆末端有一个圆柱形结构在座椅的C型导轨中运动,将直线运动转换成圆周运动来实现所需功能。

1.手柄;2.支撑柱;3.座椅;4.支撑杆;5.伸缩杆;6.驱动滚轮;7.支撑座;8.脚踏;9.辅助滚轮。
1.支撑柱;2.电动推杆;3.卡扣。
3 转向机构
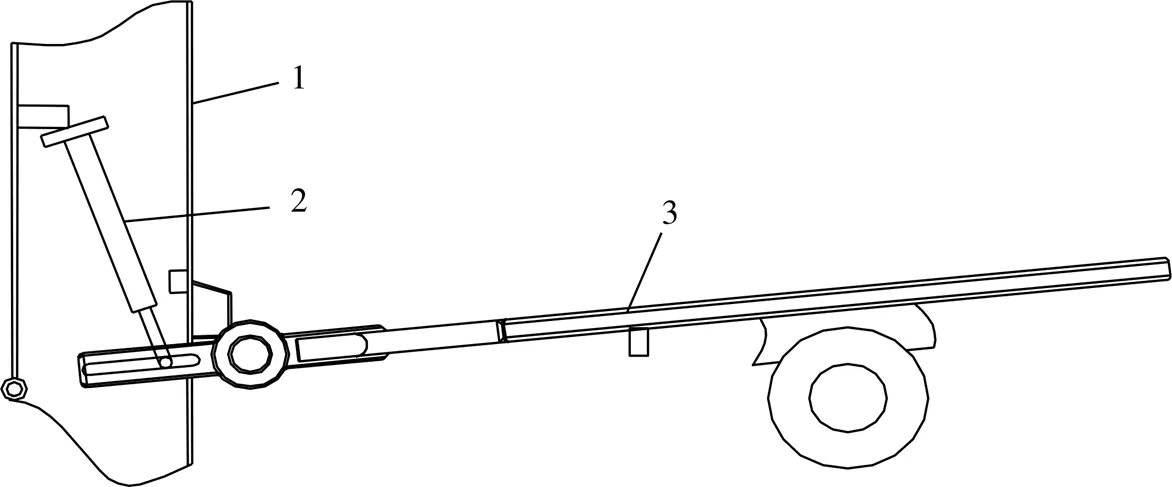
转向主要是靠使用者用脚踩在踏板上辅助手来控制转向。踏板设计舒适的、倾斜旋转可调的角度,以方便使用者实现转向。主要使用蒙特卡罗稳健设计方法、复合形法、遗传算法人工蜂群(Artifical Bee Colony,ABC)[2-6]等方式对前两轮转向机构进行优化设计,以改善机构的转向性能。利用螺纹杆对前两轮进行收起放下,这个部分使用稳定的三角形构架结构。传统转向机构都是前面一个轮或轮距较大,本结构轮距小、转向简单,如图3所示。

1.联轴器;2.脚踏板;3.支撑座;4.辅助滚轮;5.电机;6.螺杆;7.螺母;8.弹簧;9.套筒;10.环扣;11.连杆。
4 辅助滚轮升降机构
通过驱动机构带动螺杆旋转,从而使螺杆上的螺母上下移动,进一步的,杆体上的凸台会在螺母周向的两个卡台之间形成的导向槽的推动下发生转动,从而使卡扣翘起的一端变成压下去的一端,形成对环套的限位。
当载人行走时,前面的两个辅助滚轮必须放下,通过电机带动螺杆使辅助滚轮实现上下移动,即卡扣结构绕中间的螺杆转。当电机正转带动螺杆旋转、螺母下移,把卡扣结构下端顶开,使用者可以用脚辅助加上自重放下前轮,顶开的卡扣刚好卡住环扣,致使前轮不能上移,达到卡扣卡住前轮的作用。当电机反转带动螺杆反转,螺母上移,下面的弹簧带动环扣和前轮上移,向上螺母顶开卡扣的上端,卡扣抬起前轮并卡住。
如图4所示,设计了一种卡扣结构。螺杆和驱动结构输出轴连接,螺杆上设置有螺母,螺母的周向沿轴向均布设置有多个卡台,螺母外部套装有套筒。套筒开设有多个与卡台匹配的凹槽,凹槽内底面沿凹槽开设方向开设有槽缝,槽缝内设置有卡扣,卡扣包括杆体,杆体一侧的两端设置有弧形的凸起,杆体的中部和槽缝的侧壁铰接。套筒上依次套装有环套和弹簧,套筒底部固定在支撑座顶部开设的凹槽内,弹簧和凹槽内底面固定,环套上铰接有两个连接杆,连接杆背离环套的一端和轴铰接。

1.套筒;2.卡台;3.螺杆;4.螺母;5.杆体;6.卡台。
5 电源的选择
常用电源主要有蓄电池和燃料电池两种。蓄电池主要包括二次锂电池、空气电池、镍基电池、铅酸蓄电池等;燃料电池主要包括熔融碳酸盐燃料电池(Molten Carbonate Fuel Cell,MCFC)、碱性燃料电池(Alkaline Fuel Cell,AFC)、质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell,PEMFC)、直接甲醇燃料电池(Direct Methanol Fuel Cell,DMFC)、磷酸燃料电池(Phosphoric Acid Fuel Cell,PAFC)、固体氧化物燃料电池(Solid Oxide Fuel Cell,SOFC)等。
常用动力型电池主要参数对比如表1所示,其中锂离子电池技术具有以下优点:①高容量,即有一定的续行里程;②高功率,使启动快、能大电流放电、爬坡能力强;③单体电池电压高,可减少串联数量,防止电池一致性差产生的电池组故障;④容量衰减小、循环寿命长,有利于降低成本;⑤体积小、重量轻,有利于整体的轻量化和小型化;⑥能快速充电、免维护,使用方便;⑦不爆炸、无泄漏,使用安全;⑧生产过程无污染、废弃电池无公害,对环境有益;⑨价廉,有利于降低整车成本。
综合考虑最后选择锂离子电池作为电源。

表1 常见电池主要参数对比
6 驱动电机
常用电机主要有交流异步电机、有刷直流电机、无刷直流电机等,在伺服控制系统中,为了实现快速起、停、加速、减速等,要求电机必须具备两个特点:①起动和最大转矩大;②转子转动惯量小。无刷电机和有刷电机相比,由于转子上没有绕组,就没有电的损耗。因为主磁场是恒定的,所以铁损也极小,增加了工作的可靠性。
本设计采用轮毂电机作为驱动结构,具有单独车轮就能实现驱动的特点,无论是前驱还是后驱都可以轻松完成,在任何环境下都可以实现原地转向,在这种便携式辅助行走工具中具有很大的实用价值。
(1)电机功率
在行驶过程中,本身的驱动力和受到的多种阻力互相平衡,因此阻力功率和电机功率相等。根据能量守恒列出平衡方程为[7]:

则有:


(2)电机转速
拐杖主要服务老年人,为了安全,其使用时不需要太快的速度。常用的低速电机转速一般在1000~1500 r/min,高速电机转速一般约10000 r/min。
根据文献[8],有:

得到:

轮毂电机驱动,不存在变速器,采用直接驱动的方式不存在减速驱动,所以式(5)中,

(3)电机转矩
当电机功率和额定转速确定之后,计算电机的额定转矩[8]:

式中:M为电机额定转矩,N·m。
(4)驱动电机的主要参数
本便携式智能拐杖最大质量为100 kg(包括拐杖自身重量),正常时速3 km/h,最高时速4 km/h,采用一个后轮的后驱方式,即在后轮安装一个轮毂电机。
计算得:额定功率为0.2 kW,最高转速为4 km/h,最大扭矩不低于2 N·m。
7 控制系统
整体控制系统采用单片机,其中控制芯片为STM32F051C,它拥有广泛的外围增强设备、快速的数据处理能力、工作稳定性好,提高了系统的简易程度[10]。硬件电路整体框架如图5所示,包括电源、信号输入、信号处理、驱动控制、智能控制等部分。其中,A相驱动主要是控制驱动轮,控制整体的速度、启动和暂停;B相驱动主要是控制电动推杆,对座椅进行放下和收起;C相驱动主要是控制前轮及转向机构的收起和放下。
7.1 欠压保护
锂离子电池作为拐杖的电源,在使用过程中持续放电,蓄电池里的电压会逐渐降低,如果电压降低到了最大极限使用者还继续使用,则会缩短锂离子电池的使用寿命,所以必须有欠压保护措施。欠压保护电路如图6所示。

图5 硬件电路整体框架

RV1、RV2、RV3为电阻;C4为电容;Udm为截止,GND为接地。
本设计的电源正常电压为24 V,当电压低于18 V时,电路就会传递给单片机一个信号,经单片机处理给电机一个指令让其停止工作,这样就保护了电源免受损坏,增加了电源的使用寿命。
7.2 过流保护
电机在运行过程中难免会因自身发热而损坏,安装一些装置就能避免此问题的产生,但会增加成本,也会增加结构的复杂程度。本设计提出的过流保护方案是利用康铜丝作为小阻值无感采样电阻,这种方案操作简单、节约成本,符合便携式智能拐杖的性能要求。过流保护电路如图7所示[11]。

1为输出电路;2、3为输入电路;Idm为最大漏极电流;MOS-S为三极管;Rs、R20、R21、R22为电阻;C3为电容。
过流保护电路中,将电路中的信号传递到运算放大器LM358D的反相输入端,如果LM358D同相输入端输出电压大于电路中传递的信号,则运行正常;如果电路中出现过流现象,则这两种信号差值呈相反趋势,此时电路输出低电平,电机停止运行,起到保护驱动电机免于损坏的作用。
8 结语
本文提出的一种辅助老年人行走的便携式智能拐杖,能够对腿脚不便的老年人提供行走支撑,并具备短距离低速乘坐的功能。该拐杖携带方便,为老年人的正常出行提供便利。
[1]郑华光,鞠奕,沈东超,等. 老年人意外伤害的首要病因跌倒的评价和预防[J]. 中国卒中杂志,2013,10(22):23-27.
[2]苏胜. 基于舒适度的休息性座椅相关角度分析[J]. 包装工程,2010(22):25-29.
[3]张蕾,张文明,申焱华. 基于蒙特卡罗法的轨迹再现转向机构稳健性设计[J]. 北京科技大学学报,2006,28(12):1174-1177.
[4]姚明龙,王福林. 车辆转向梯形机构优化设计及其求解方法的研究[J]. 机械设计与制造,2007,20(5):24-26.
[5]Mir Mohammad Ettefagh,Morteza Saeide Javash. Optimal synthesis of four-bar steering mechanism using AIS and genetic algorithms[J]. Journal of Mechanical Science and Technology,2014,28(6):2351-2362.
[6]叶国云,吕茂印,冯振礼,等. 基于ABC算法的非对称转向机构两轮转向优化[J]. 机械设计,2017(7):67-72.
[7]许媛. 浅析纯电动汽车如何匹配驱动电机[J]. 汽车维修,2012(05):15-17.
[8]孔垂毅,代颖,罗建. 电动汽车轮毂电机技术的发展现状与发展趋势[J]. 电机与控制应用,2019,46(2):101-108,113.
[9]周璇. 减速驱动型轮毂电机的研究[D]. 唐山:河北联合大学,2014.
[10]李占. 低速电动车无刷直流电机控制系统设计[D]. 石家庄:河北科技大学,2014.
[11]安旭松,丁颂,王江,等. 电动车存取停放控制系统设计[J]. 机械,2019,46(2):68-71.
Design of A New Type of Portable Intelligent Crutch
WU Daikun1,YU Junjie1,LIAO Wenkai1,XU Liqiang1,FENG Qi1,YU Linkun1,DA Zhiwei2
(1.China Railcom Rail Operation Co., Ltd., Wenzhou325000, China;2.Xi'an Winwei Machinery Co., Ltd., Xi'an 710065, China )
A new type of crutch is designed based on the analysis of the characteristics of the users of the crutch and various influencing factors. Firstly, the design starts with the traditional monotonous mechanical crutch structure, and uses a three-wheeled base structure to ensure the overall stability. Secondly, the wheel hub can be folded when not in use. Thirdly, the user can use it more conveniently through the control system. This design adds electric drive and seat functions mainly including the design of the crutch seat, walking function, steering mechanism, as well as the selection of the main parts and the design of the control system, and the reliability analysis is carried out to finally develop a new type of portable intelligent crutch.
crutches;electric drives;steering mechanisms;portable
TH122
A
10.3969/j.issn.1006-0316.2022.05.012
1006-0316 (2022) 05-0075-06
2021-07-23
吴代坤(1998-),男,陕西商洛人,助理工程师,主要研究方向为机械设计制造及理论,E-mail:w2017042600@163.com。
