变距四旋翼飞行器气动力及噪声特性计算研究
2022-05-29赵俊李志彬
赵俊 李志彬
摘要:基于计算流体力学(CFD)建立了适用于多旋翼飞行器的流场计算模型,采用嵌套网格方法模拟旋翼运动、双时间方法进行时间推进,分析变距四旋翼飞行器的气动力特性。在此基础上,采用FW-H(Ffowcs Williams-Hawkings)方程计算了变距四旋翼飞行器的噪声特性(包括考虑和不考虑旋翼间气动干扰两种情况)。计算结果表明,由于旋翼间的气动干扰,致使变距四旋翼的载荷噪声较大,进而导致总噪声较大。在对变距四旋翼飞行器噪声进行仿真时,考虑旋翼间气动干扰是必要的。
关键词:变距四旋翼;计算流体力学;FW-H方程;噪声特性;气动干扰
中图分类号:211.52文献标识码:ADOI:10.19452/j.issn1007-5453.2022.04.008
基金项目:航空科学基金(20200057002001);国防基础科研计划资助(JCKY2019205D002)
相比于固定翼飞机,多旋翼飞行器可以实现定点悬停、垂直起降,具有机动性高的特点;相比于常规直升机,它具有尺寸小、结构简单、操控简单和成本低的特点。这些特征使得多旋翼飞行器得到迅猛发展,工业和商业应用领域的需求逐年增长[1-2]。
为了提高多旋翼飞行器的续航时间和可靠性,了解旋翼的气动性能对初步设计、气动优化、结构分析和控制设计具有重要意义[3-4]。此外,商用多旋翼飞行器可能会在人口密集的地区飞行,其产生的气动噪声也会引起周围社区的关注[5-6]。因此,针对目前多旋翼飞行器对旋翼的高要求,对旋翼的气动和声学性能进行研究是非常必要的。
与单旋翼直升机相比,多旋翼构型中旋翼与旋翼间的相互作用现象严重,导致尾迹流场高度复杂。此外,旋翼间的相互作用效应可能会引起明显的升力波动以及噪声水平的变化。因此,需要对旋翼干扰作用引起的尾迹非定常特性进行深入研究,为低噪声多旋翼系统的设计提供技术基础。
在国外,先前关于多旋翼飞行器的气动及声学特性研究大多采用试验方法进行,并且集中于气动方面。C. Russell等[7]测量获得了商用多旋翼模型在不同风速、旋翼转速和飞行器姿态下的性能。D. Shukla等[8]研究了多旋翼无人机复杂的气动特性,并利用流动可视化和高速立体粒子图像测速法(PIV)获取了详细的流体结构、涡旋演变以及涡旋之间的相互作用。S. Yoon等[9]用分离涡模拟方法研究了悬停状态下倾转旋翼机的气动干扰作用。N. W. Intaratep等[10]测量了一架四旋翼飞行器的气动力和声学特性,虽然他们对比分析了四旋翼飞行器设置为1、2和4副旋翼时声学特性的区别,但没有分析出旋翼间的气动干扰对声学特性的影响。在国内,杨璐鸿[11]開展了纵列式六旋翼大载荷无人机气动特性数值模拟及其优化研究。T. Zhou等[12]采用试验测量与数值预测相结合的方法,研究了旋翼间距对双旋翼构型的气动性能和噪声特性的影响,但是仍然缺乏考虑气动干扰的前后对比分析。

1计算方法
1.1流场计算方法
多旋翼构型中旋翼与旋翼间的相互作用现象严重,导致多旋翼飞行器的流场高度复杂。计算中采用惯性坐标系下的三维非定常雷诺平均N-S(Navier-Stokes)方程作为主控方程。
在流场计算时,对网格单元内流场变量进行重构时采用二阶MUSCL(monotone upwind schemes for scalar conservation laws)格式,计算网格交界面上对流通量时采用低耗散的Roe格式,模拟流场的高度非定常效应时采用双时间法。同时,湍流模型采用S-A(spalart-allmaras)一方程模型。采用无穷远处无干扰流场作为初始条件,以无滑移边界条件为物面处的运动学边界条件[13]。
为提高流场计算效率,在双时间法中的伪时间步引入高效的LU-SGS隐式时间格式来加快流场求解的收敛速度;同时,采用OpenMP并行策略对流场的求解过程进行加速处理。
采用嵌套网格技术对多旋翼飞行器流场空间进行离散。根据旋翼桨叶几何特点,采用“平铺法”生成C-O或CH型桨叶三维网格[13]。背景网格采用笛卡儿网格类型,在旋翼位置进行网格局部加密。
1.2声学计算方法
以上公式的详细推导和参数定义可参见参考文献[14],噪声计算中选取桨叶贴体网格作为声源积分面,声源面随桨叶运动,声源面的输入参数由流场中获得。F 1A公式易于求解、物理意义明确,被广泛应用于直升机旋翼、螺旋桨等旋转叶片的声学研究中。
1.3计算方法验证
本文选取中国直升机设计研究所在中国空气动力研究与发展中心4m×5.5m声学风洞的旋翼试验数据对计算结果进行验证。试验中采用2m级直径模型旋翼,测量了旋翼的性能数据和噪声数据。模型旋翼有5片桨叶,桨叶弦长0.062m,桨尖抛物线后掠,采用线性扭转。传声器阵列以桨中心为球心,测量距离为5倍旋翼半径。
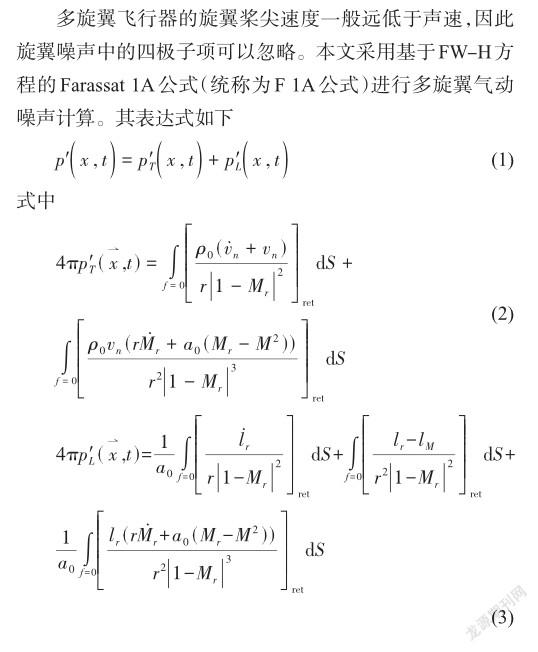
图1给出了悬停状态下不同观测点处声压历程的计算值与试验值对比(拉力系数CT=0.014)。
从图1中可以看出,本文建立的旋翼噪声计算模型计算得到的观测点处的声压历程与试验值吻合得很好,表明了本文建立方法对孤立旋翼噪声计算的有效性。
目前,国内外可供对比的多旋翼飞行器试验数据较少,本文选取了参考文献[15]中的共軸双旋翼为验证算例。参考文献[15]采用Helios和RCAS进行共轴双旋翼流场计算,噪声计算则采用PSU-WOPWOP程序。本文以参考文献中的某一前飞状态为算例,对比结果如图2所示。从图中可以看出,计算的声压时间历程与文献值在相同的时间内声压周期是一致的,虽然部分区域的声压有一定的差别,但整体的峰峰值相差不大,说明本文建立的方法能够有效地计算双旋翼间的气动干扰噪声。

2计算分析
2.1变距四旋翼计算模型
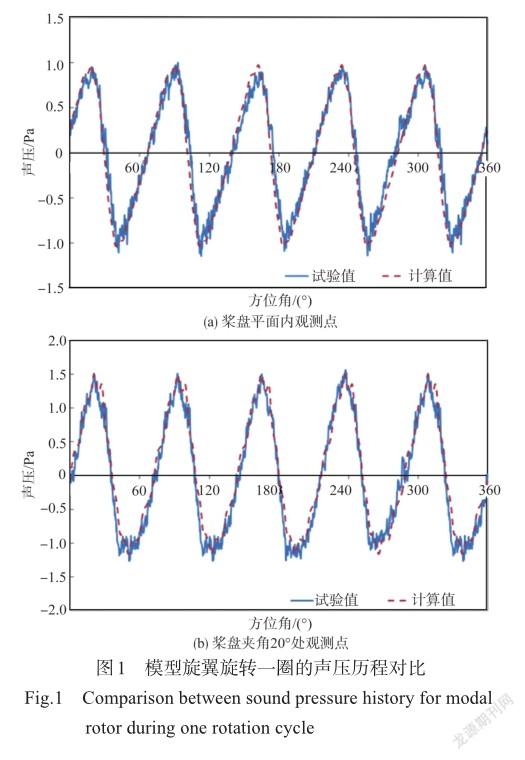
本节针对中国直升机设计研究所研制的20kg级变距四旋翼进行研究。变距四旋翼包括4副旋翼,每副旋翼两片桨叶,如图3所示。
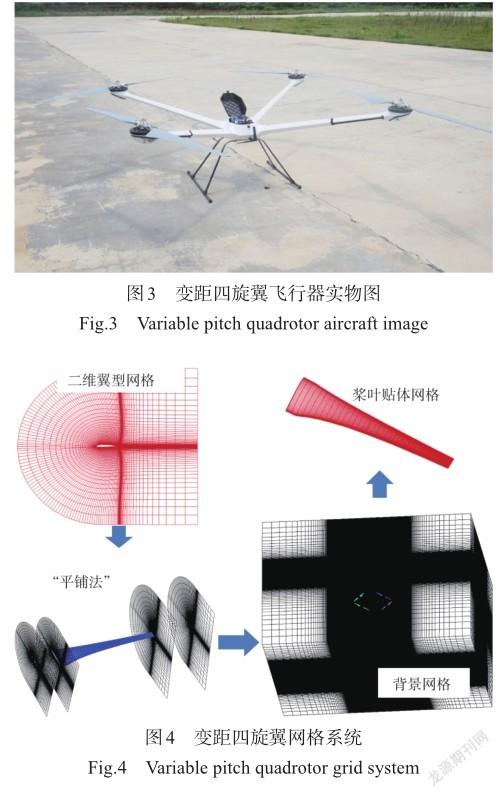
根据旋翼桨叶几何特点,采用“平铺法”生成围绕桨叶的C-H型贴体网格。图4给出了变距四旋翼计算网格系统。桨叶网格数为185×47×87,背景网格数为367×169×357。
旋翼半径为0.825m,翼型为SD7032,转速为700r/min,相邻旋翼中心间距为1.76m。采用变扭转角和变弦长设计,弦长雷诺数为1.64×105。桨叶只有总距控制,无周期变距,无挥舞铰,摆振自由。旋翼编号和飞行姿态如图5所示,其中两幅旋翼俯视逆时针旋转,两幅旋翼俯视顺时针旋转,平飞时靠前的旋翼为rotor1和rotor3。计算包括悬停和小速度平飞两个状态,悬停时的操纵总距为10°,平飞时桨盘迎角为-5°,操纵总距为8.4°。操纵量是由单副旋翼配平5kgf(1kgf≈9.8N)升力后得到的。

为了研究旋翼间气动干扰对变距四旋翼噪声特性的影响,计算了两种情况:第一种情况,不考虑旋翼间气动干扰,将四旋翼分为四副单旋翼进行气动力计算和噪声计算,通过叠加获得四旋翼的计算结果;第二种情况,考虑旋翼间气动干扰,对完整的变距四旋翼进行建模计算分析。
2.2气动特性分析
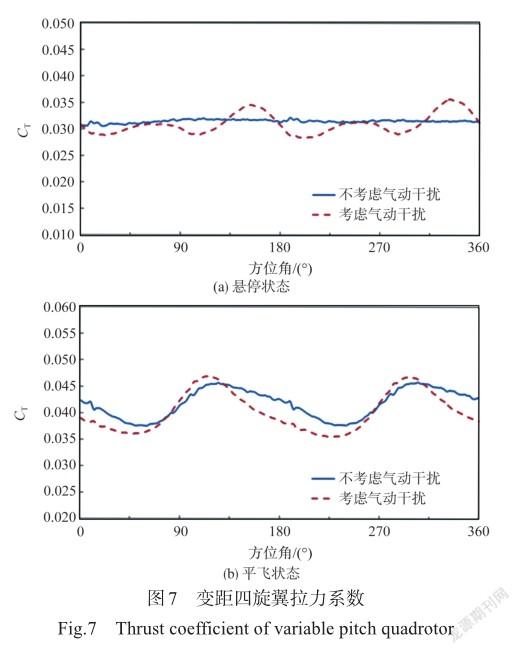
图6给出了孤立旋翼拉力系数计算收敛曲线。从图中可以看出,本文方法计算得到的低雷诺数旋翼流场结果是收敛的。悬停状态是变距四旋翼重要的工作状态之一,不考虑旋翼间气动干扰的流场可认为是准定常的,因此可采用定常流场求解器进行计算。然而,真实变距四旋翼的组合流场即使在悬停状态也是高度非定常的,为增强对比分析的置信度,两种情况均采用非定常数值方法求解。由图6(a)可见,悬停状态不考虑气动干扰的变距四旋翼拉力随方位角变化很小,这与实际情况相符,表明本文采用非定常流场求解器计算悬停状态是有效的。

图7计算了变距四旋翼拉力随方位角的变化曲线,悬停状态下,考虑气动干扰状态的变距四旋翼拉力系数在方位角135°~180°和315°~360°范围内产生了较大的脉动。从图7(b)中可以看出,平飞状态下考虑气动干扰的拉力脉动量幅值较大,这都是旋翼间气动干扰导致的。
图8示出了悬停状态旋翼桨叶r/R=0.625、0.8、0.97三个剖面处的法向力系数CN随方位角的变化情况,其中R为旋翼半径,r为剖面展向位置。由图8可见,考虑气动干扰时旋翼桨叶剖面CN的脉动幅值很大。在本文的计算状态下,0.97R剖面CN的脉动幅值甚至与不考虑气动干扰的剖面CN均值相当。因此,在对旋翼桨叶进行强度校核时,应充分考虑到由气动干扰引起的脉动载荷。
图9给出了平飞状态旋翼桨叶r/R=0.625、0.8、0.97三个剖面处的法向力系数随方位角的变化情况。由图可见,变距四旋翼rotor1(靠前)的CN随方位角的变化趋势相近,但CN脉动量要略大于孤立旋翼状态。变距四旋翼rotor2(靠后)的CN分布与rotor1存在明显区别。在0.625R剖面,CN脉动量要小于孤立旋翼状态,但在0.8R和0.97R两个剖面,考虑气动干扰的CN脉动量均大于孤立旋翼,这是因为靠后的旋翼与靠前旋翼尾迹产生气动干扰导致的。
2.3噪声特性分析
噪声计算的观测点以变距四旋翼中心形成辐射半球面,半径为5倍旋翼半径,将半球面以来流方向等角割圆锥投影转换,得到声辐射球的Lambert投影,如图10所示。这里定义噪声热点区域是指噪声级较高的观测点区域,噪声冷点区域是指噪声级较低的观测点区域。
厚度噪声是由于旋转桨叶的运动引起流体扰动而产生的,载荷噪声是由作用在旋转桨叶表面上的气动载荷引起的压力波动而产生的。从式(2)可以看出,影响厚度噪声的因素主要是桨叶旋转速度和运动速度。因此,旋翼间的气动干扰对厚度噪声基本无影响,主要影响的是载荷噪声。
图11给出了变距四旋翼的厚度噪声云图。由图11可知,悬停状态下厚度噪声的热点区域位于桨盘平面内,且对应的方位角在旋翼中心与飞行器中心连线的角平分线上。还可以看出,四副旋翼正下方分别存在一个噪声冷点区域。
平飞状态下厚度噪声的热点区域分布与悬停状态相同,但是方位角0°/360°的热点区域对应噪声级更高。同时,还可以发现,噪声冷点区域相比于悬停状态有明显变化,从4个冷点区域变为1个,并且位于变距四旋翼中心正下方。


图12给出了悬停状态下变距四旋翼的载荷噪声云图。考虑和不考虑气动干扰的载荷噪声差值绘制于图12(c)中。由图12可知,两种情况下的载荷噪声热点区域一致,均在飞行器中心的正下方。但可以看出,考虑气动干扰情况的载荷噪声级明显较高。从图12(c)中可以看出,考虑旋翼间气动干扰情况的载荷噪声级在所有观测点均较大,在载荷噪声主要传播方向(飞行器中心下方区域)噪声差值为3~6dB。
图13给出了悬停状态下变距四旋翼的总噪声云图。对比图12和图13可以看出,悬停状态下载荷噪声与总噪声云图基本相同,这是因为载荷噪声在总噪声中占主导地位。从图13(c)可以看出,悬停状态下的总噪声在主要传播方向的差值为3~6dB。
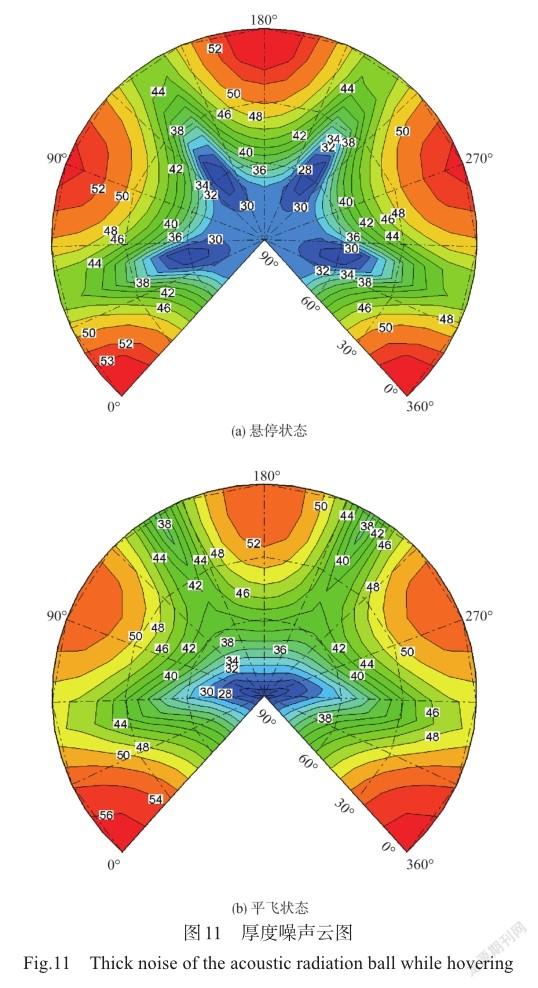
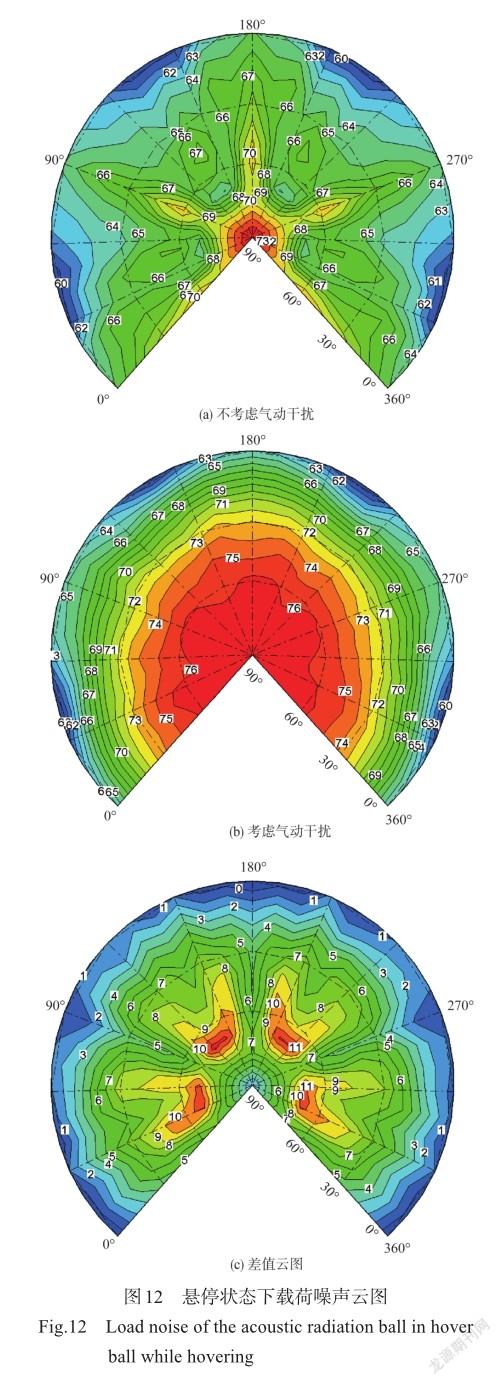
图14给出了平飞状态下变距四旋翼的载荷噪声云图。考虑和不考虑气动干扰的载荷噪声差值繪制于图14(c)中。由图可知,两种情况下的载荷噪声热点区域一致,均在飞行器飞行方向的斜下方区域。但可以看出,考虑气动干扰情况的载荷噪声级明显较高。从图14(c)中可以看出,考虑气动干扰的计算结果在绝大部分观测点均较大。载荷噪声差值最大区域位于桨盘夹角20°、方位角90°和270°附近,差值能够达到8.4dB。在载荷噪声主要传播方向上差值为2~3dB。
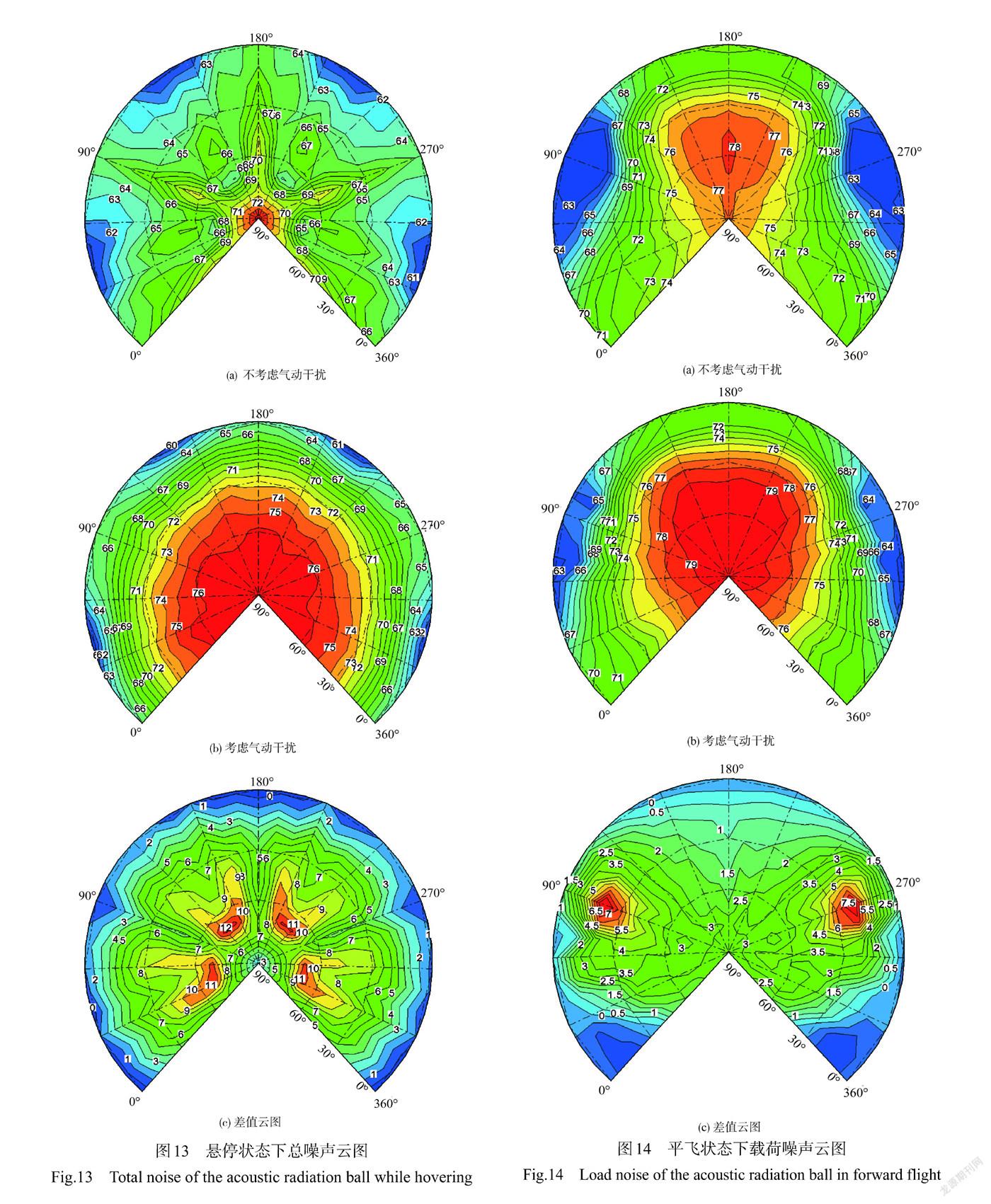

图15给出了平飞状态下变距四旋翼的总噪声云图。对比图14和图15可以看出,平飞状态下载荷噪声与总噪声云图基本相同,这是因为载荷噪声在总噪声中占主导地位。从图15(c)可以看出,平飞状态下的总噪声最大差值达到7.5dB,略小于载荷噪声最大差值,这是由叠加厚度噪声导致的。在载荷噪声主要传播方向上差值为2~3dB。
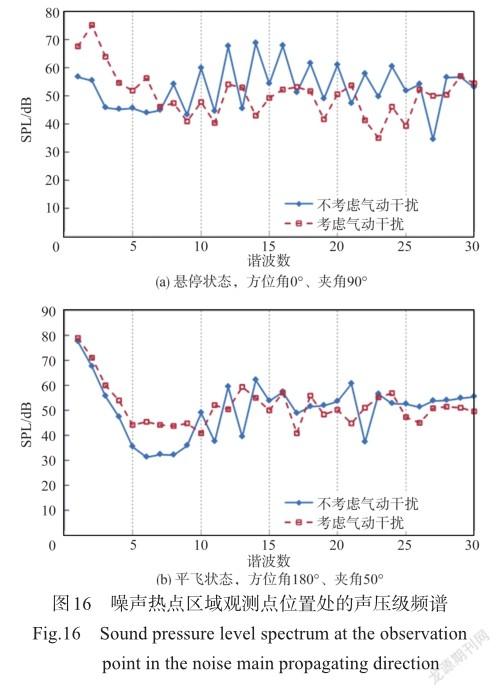
图16计算了噪声热点区域观测点位置处的声压级频谱,图中纵坐标为声压级SPL。从图中可以看出,考虑气动干扰的情况在前几阶谐波频率上的噪声级较大。
3结论
通过研究,可以得出以下结论。
(1)无论在悬停还是平飞状态下,考虑气动干扰的变距四旋翼拉力脉动量要大于不考虑气动干扰的情况。在对旋翼桨叶进行强度校核时应充分考虑到由气动干扰引起的载荷变化。
(2)在两种飞行状态下,变距四旋翼的载荷噪声在总噪声中占主导地位。悬停状态下总噪声主要传播方向位于飞行器中心的正下方,5R处最大噪声级为77.2dB,平飞状态下总噪声主要传播方向位于飞行器飞行方向的斜下方,5R处最大噪声级为80.4dB。
(3)考虑和不考虑旋翼间气动干扰对变距四旋翼噪声的主要传播方向影响不大,但考虑气动干扰时旋翼拉力脉动量的增大导致总噪声增大,在主要传播方向上的增大可达到6dB。因此,在对变距四旋翼飞行器噪声进行仿真时,考虑旋翼间气动干扰是必要的。
参考文献
[1]Charavgis F. Monitoring and assessing concrete bridges with intelligent techniques[D]. Netherland:Delft University of Technology,2016.
[2]Hassanalian M,Abdelkefi A. Classifications,applications,and design Challenges of drones:a review[J]. Progress in Aerospace Sciences,2017,91:99-131.
[3]周云,胡和平,余智豪.高速升力偏置旋翼桨叶结构形变特性研究[J].航空科学技术,2021,32(6):57-64. Zhou Yun, Hu Heping, Yu Zhihao. Research on blade structure deformation characteristics of high-speed lift offset rotor[J]. Aeronautical Science & Technology, 2021, 32(6): 57-64. (in Chinese)
[4]张勇勇,孙伟,曹亚雄.轻型民用直升机AC311A适航审定状态气动噪声数值模拟[J].航空科学技术,2020,31(4):30-36. ZhangYongyong,SunWei,CaoYaxiong.Numerical simulation of the light civil helicopter AC311A aerodynamic noise in airworthiness certification status[J]. Aeronautical Science & Technology, 2020, 31(4): 30-36. (in Chinese)
[5]Kloet N,Watkins S,Clothier R. Acoustic signature measurement of small multi-rotor unmanned aircraft systems[J]. International Journal of MicroAir Vehicles,2017,9(1):3-14.
[6]Britcher C P,Landman D,Duvall B,et al. An aeroacoustic study of propellers for small electric propulsion aircraft[C]// AIAA Aviation Forum,23rd AIAA/CEAS Aeroacoustics Conference,2017:2017-3710.
[7]Russe1l C,Jung J,Willink G,et al. Wind tunnel and hover performance test results for multi-copter UAV vehicles[C]// American Helicopter Society 72nd Annual Forum Proceedings,West Palm Beach,Florida,2016.
[8]Shukla D,Hiremath N,Patel S,et al. Aerodynamic interactions study on low-re coaxial and quad-rotor configurations[C]// The American Society of Mechanical Engineers 2017 International Mechanical Engineering Congress and Exposition,2017.
[9]Yoon S,Lee H C,Pulliam T H. Computational analysis of multi-rotor flows[R].AIAA2016-0812,2016.
[10]Intaratep N W,Alexander W N,Deveport W J. Experimental study of quadcopter acoustics and performance at static thrust conditions[C]// 22nd AIAA/CEAS Aeroacoustics Conference,2016.
[11]楊璐鸿.纵列式六旋翼大载荷无人机气动特性数值模拟及其优化研究[D].吉林:吉林大学,2015. Yang Luhong. Numerical simulation and optimization of aerodynamic characteristics of Hexacopter with large load[D]. Jilin: Jilin University, 2015.(in Chinese)
[12]Zhou T,Fattah R. Tonal noise characteristics of two small-scale propellers[C]// 23rd AIAA/CEAS Aeroacoustics Conference,2017.
[13]樊枫.直升机非定常干扰流场与声场的计算方法研究与应用[D].南京:南京航空航天大学, 2013. Fan Feng. Research and application of computational methods for unsteady flow filed and sound field of helicopter[D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2013. (in Chinese).
[14]Ffowcs J E,Hawkings D L. Sound generated by turbulence and surfaces in arbitrary motion[J]. Philosophical Transactions of the Royal Society,1969,A264(1151):321-342.
[15]Jia Z,Lee S. Aeroacoustic analysis of a lift-offset coaxial rotor using high-fidelity CFD-CSD loose coupling simulation[C]// American Helicopter Society 74thAnnual Forum,2018.
Computational Research on Aerodynamic and Noise Characteristics of Variable Pitch Quadrotor Aircraft
Zhao Jun,Li Zhibin
Science and Technology on Rotorcraft Aeromechanics Laboratory,China Helicopter Research and Development Institute,Jingdezhen 333001,China
Abstract: In order to analyze the aerodynamic force characteristics of the multi-rotor aircraft, a flow field calculation modal is established based on the computational fluid dynamics (CFD). The nested grid method is used to simulate the blade motion, and the dual-time method is used for time propulsion. Based on this, the noise characteristics of the multi-rotor aircraft are calculated by using FW-H equation. A variable pitch quadcopter is selected for the study which considers and does not consider the aerodynamic interference between the rotors, and the aerodynamic and noise characteristics are compared and analyzed. The calculation results show that the amplitude of aerodynamic pulsation amplitude of the quadrotor is larger due to aerodynamic interference between rotors. The intensity characteristics of the quadrotor will be overestimated if the aerodynamic interference between rotors is not considered. The load noise of the quadrotor plays a dominant role in the total noise, whether it is hovering of flying flat. Because of the aerodynamic interference between the rotors, the load noise of the quadrotor aircraft is larger, which leads to the larger total noise. It is necessary to consider aerodynamic interference between rotors when simulating the noise of quadrotor aircraft.
Key Words:variable pitch quadrotor;computational fluid dynamics;FW-H equation;noise characteristic; aerodynamic interference
