一种智能车位地锁的设计与运动仿真
2022-05-28钟丽琼徐玉梁
胡 浩,钟丽琼,徐玉梁
(贵阳学院 机械工程学院,贵州 贵阳 550005)
随着社会的快速发展,人民生活水平的逐步提高,作为交通工具的汽车也逐渐普及到家家户户,车辆与日俱增的同时,车位的数量也成为让人头痛的一个问题,经常会引起车主之间一些不必要的纷争[1-4],车位地锁的出现解决了这一问题。随之而来对车位地锁的需求也日益增加,目前市场上的车位地锁主要以传统机械式手动车位地锁为主,该车位地锁因其具有结构简单,价格低廉,无需过多维护保养等优点获得了很多车主的青睐,因而应用较为广泛。但其缺点也显而易见,即在使用时极其不便,车主在驾驶车辆进入或离开车位时,需要下车进行手动操作车位地锁的打开与关闭,再将车辆驶进或驶离车位。当遇到恶劣天气时,使用不便的问题就显得更加突出。因此,为解决上述问题,遥控车位地锁就成为了研发的重点方向[5-7],在此背景下,本文提出了一种基于无线遥控的智能新型车位地锁结构。本车位地锁在机械结构与其操作控制上进行了改进,运用无线遥控控制与自动控制相结合的方式进行车位地锁的控制,使车主无需上下车就可轻易打开或关闭车位地锁,在驾驶车辆离开或进入车位时,很大程度上减少了停车过程中所需要的时间与过多的不便,有效地提高了车主的停车效率。
1 总体设计
本文车位地锁主要分为锁体机构与锁体控制单元两部分组成,其中锁体机构部分又由警示牌、支撑杆、驱动杆、底座、驱动电机和电控锁等组成;锁体控制系统由无线发射器、接收器、控制主板、限位开关、红外线感应器、驱动模块和电源等组成,各单元的连接及锁体主要结构如图1 所示。

图1 车位地锁总体结构
车位地锁工作原理为:遥控器发出“关”信号,接收天线接收信号,控制主板收到信号后,将控制信号传到驱动控制,控制驱动电机转动和电控锁的打开,当地锁打开到指定的位置触碰限位开关,限位开关将信号传递到控制主板,对信号进行分析处理后,将控制信号“停止”传递到驱动控制;驱动控制电机停止和控制电控锁打开,地锁完成关闭。
遥控器发出“开”信号,接收天线接收信号,控制主板收到信号后,将控制信号传到驱动控制,控制驱动电机转动和电控锁的打开,当地锁打开到指定的位置触碰限位开关,限位开关将信号传递到控制主板,对信号进行分析处理后,将控制信号“停止”传递到驱动控制;驱动控制电机停止和控制电控锁打开,地锁完成打开。
当车离开时红外线光电开关检测不到车的存在,并将信号“开”传递到控制主板,对数据进行分析处理后,把控制信号“开”传递到驱动控制;在10 秒后驱动控制控制电机转动和电控锁的打开,完成开锁。
2 车位地锁锁体设计
2.1 结构设计
如图2 所示为车位地锁的锁体结构图,锁体中警示牌的上下两端分别与支撑杆和驱动杆的一端相铰接,支撑杆和驱动杆的另一端均分别铰接于底板上,四个铰接处的铰接轴均相互平行,驱动杆上与底板相铰接的一端又同时与驱动电机的输出轴传动连接。
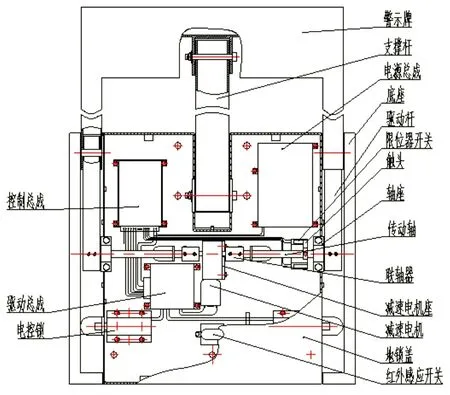
图2 车位地锁锁体结构
地锁内,电控锁设置于用于嵌置驱动杆的条形槽的侧面,电控锁的锁头为电控伸缩锁头,驱动杆在嵌置于条形槽内时,驱动杆上对应电控锁的锁头处开设有限位孔。此外,限位开关触碰器是与驱动杆相平行的条形结构,限位开关触碰器的一端固定于驱动电机的输出轴上,另一端为限位开关触碰端,输出轴的相对两侧分别对应设置有一个限位开关。限位开关触碰器在传动轴的带动下摆动至输出轴的两侧并与底板相平行时,限位开关触碰器的限位开关触碰端分别与输出轴两侧的限位开关相接触,其空间位置的布置及电源、控制、驱动、等单元和红外传感器开关等的布置如图2 所示。
地锁警示牌的相对两侧分别铰接有一个驱动杆,两个驱动杆的长度相同并平行设置,两个驱动杆与警示牌的铰接处同轴设置,且两个驱动杆与底板的铰接处也同轴设置,底板上端的相对两侧开设有用于嵌置驱动杆的条形槽。
地锁主体机构采用四连杆机构设计,在打开或者关闭的过程中各部件之间具有良好的联动性,地锁可顺畅地打开或关闭。车位地锁的五个主要部件在地锁打开时侧视图整体成三角形,具有稳定性好的几何特点,此外,五个主要部件都采用不锈钢材料制成,这使得地锁在整体上具有良好的强度。相较于传统的车位地锁,本文所述的车位地锁在稳定性、强度等性能上优于传统的车位地锁,可有效防止地锁损坏,阻止他人车辆的入侵,可靠性好,能更好地看住主人的车位。材质上的选择,地锁内各电子器件的防水设计,让地锁即使在各种极端天气情况下也不易产生锈蚀,延长其使用寿命,有效保障地锁的稳定运行。
2.2 锁体工作原理
车位地锁整体机构运动的动力源为减速电机提供的扭转转矩;通过联轴器将减速电机输出轴与传动轴连接,传动轴与驱动杆连接,最终将减速电机输出的扭转转矩传递至驱动杆,从而带动整个地锁机构的运动;驱动杆的另一端铰接处绕传动轴的轴心线做摆臂运动,带动与之相铰接的警示牌运动,警示牌又带动与之相铰接的支撑杆运动,支撑杆围绕底板与之相铰接的铰接轴轴心线做摆臂运动;最后组成整体主要机构的复合运动。
当整体机构运动到相应位置时,电控锁锁头伸出插入驱动杆内或缩回电控锁内,从而实现机构运动与停止的控制。
3 车位地锁运动分析
根据设计的机构参数建立坐标系如图3 所示,将各机构部件表示为矢量,结构封闭矢量方程的复数矢量形式为:

图3 参数计算坐标系

应用欧拉公式将(1)的实部、虚部分离,得

由上式(2)可求得两个未知方位角。
首先求得

4 实验研究
根据地锁各主要部件的设计参数计算得出如下图4 所示驱动杆、警示牌、支撑杆的角位移、角速度、角加速度曲线图。根据图4(b)所示数据,部件运动到极点时的受力情况,满足预先设计电机轴力矩折算之后的受力要求。
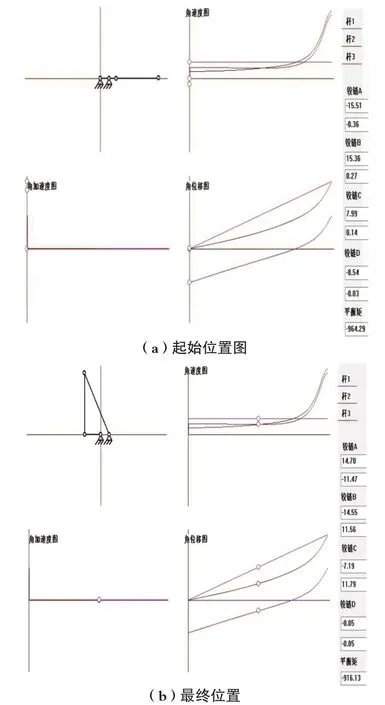
图4 角位移、角速度、角加速度的曲线图
在图4 所示的各部件角位移、角速度、角加速度的曲线中,在地锁运行过程的有效曲线段内(有效曲线段为地锁从起始位置运行到最终位置中间变化过程的曲线),各部件的角位移匀速增加,驱动杆始终匀速变化,警示牌与支撑杆虽然有加快上升的阶段,但是此阶段已不在地锁运行的有效曲线段内;角速度的变化相对平缓,驱动杆始终不变,警示牌与支撑杆虽有急剧上升的阶段,但此阶段也不在地锁运行的有效阶段内;角加速度的变化在有效线段内几乎不变,由此分析可知此地锁主要机构部件的运动平缓稳定,相较于剧烈的运动,平缓稳定的运行有益于减小机构运行时的内应力,减小各铰链的磨损,保证机构性能,也有益于提高机构的疲劳强,提高地锁的使用寿命。
5 结论
本文提出并设计了基于无线遥控技术的智能新型车位地锁,该车位地锁利用无线遥控技术进行信号的无线传输以及遥控并与自动控制相结合对地锁进行控制;对该车位地锁机构进行了优化设计,采用四连杆机构,关锁时成三角形,并采用不锈钢材料,使其具有运行稳定,结构牢固可靠,使用寿命长等优点;经过模拟控制验证,结果表明,车位地锁在机构设计上满足预定设计要求,各部件的角位移匀速增加,角速度的变化相对平缓,角加速度的变化在有效线段内几乎不变,地锁主要机构部件的运动平缓稳定。