全自动超声波洗碗机结构优化设计
2022-05-28游向东
游向东
(上超电器科技(上海)有限公司,上海 201801)
餐具清洗是餐饮店必不可少的一道工序。目前,大多数餐饮店采用人工完成餐具清洗工作,不仅费时费力,而且增加了企业的劳动成本[1]。所以,设计一款可以替代人工清洗餐具的商用洗碗机,可以更好地解放工人双手,降低企业的用工成本。但是,目前市场上常见的洗碗机存在体积大、性能差等缺点[2]。为进一步加快我国家餐饮业的发展,以洗碗机为对象进行深入研究,在前人的基础上进行优化改造,设计了一款可以替代人工自动完成餐具清洗功能的双层超声波洗碗机,进一步解放了人们的双手,降低了餐饮行业的用工成本,加快了我国餐饮业的发展,也为家用洗碗机的研发提供了相关参考。
1 洗碗机系统组成
图1为设计的洗碗机系统组成结构示意图,主要由循环传送网带机构1、网带升降机构2、网带张紧机构3、循环喷淋机构4、超声波清洗机槽5以及控制器6等多个子系统组成。
循环传送网带机构1是利用传送带原理设计的,可以实现被清洗餐具的自动运输功能[3]。网带升降机构2主要是将洗碗机分为上下两层,在网带运输过程中可以实现餐具在上下两层之间的循环输送,实现多功能清洗。网带张紧机构3属于辅助设备,主要是在网带机构循环传送时可以自动调节其张紧力,使网带运行更加稳定。循环喷淋机构4用来对餐具进行喷水,从而起到更好的清洗作用。超声波清洗槽5通过发送超声波带动网带振动,可以使餐具在清洗液中清洗得更加彻底。控制器6是洗碗机的控制核心,相当于人的大脑,可以对各个子系统进行总体协调控制。
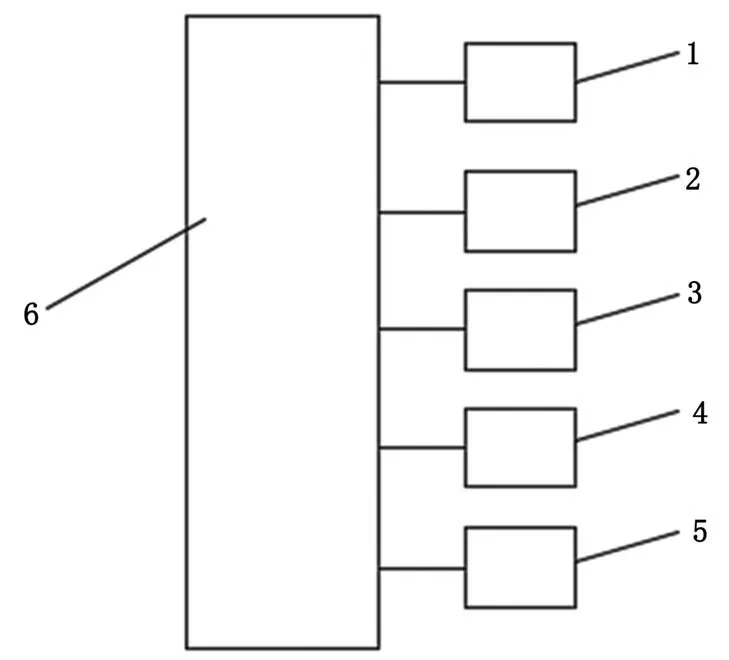
图1 洗碗机系统组成结构示意图
2 洗碗机的总体设计及其工作原理
图2为洗碗机的整体机械结构图,主要由网带输送机、循环喷淋、超声波清洗、电气箱及控制单元等构成。
循环传送网带机构1属于一个小型子系统,由网带升降机构2、网带张紧机构3等机构组成。将需要清洗的餐具存放在网带上,利用网带传动原理,通过电机驱动,实现网带的循环运动,进而实现餐具的自动运输功能。为更好地实现餐具的稳定运输和清洗功能,增加了网带升降机构2和网带张紧机构3。三大机构相互配合,可以更好地实现餐具的自动运输。因为设计的是双层洗碗机,因此在网带升降机构2的配合下,可以实现上层网带上的餐具自行运送至下层,便于完成洁净清洗。此外,张紧机构3的存在可以更好地调节网带运动过程中的张紧力,使网带运行更加稳定。
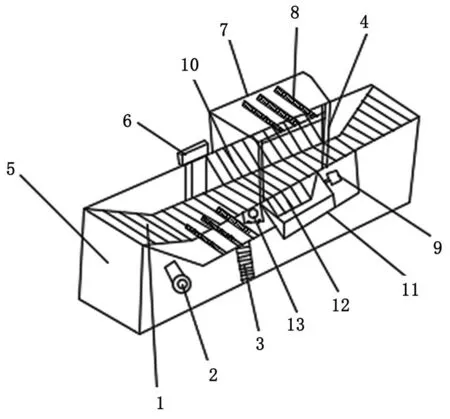
图2 洗碗机整体机械结构图
循环喷淋机构4位于洗碗机上层位置,主要由喷淋管8、水泵9、集水板10和水管连接集水箱11等零件组成。当位于网带上的餐具运行到预设位置时,此时水泵9开始工作。通过喷淋管8将集水箱11内部的清洗液体抽到集水板10上,利用控制系统驱动集水板10实现打通,此时清洗液通过上下双层排喷淋管将清洗液喷射到餐具中完成清洗,完毕后控制集水板10闭合。
超声波清洗槽5主要由导流板12、超声波发生器13等关键部件组成。当承载着餐具的网带运送至下层超声波清洗槽中时,通过超声波发生器13工作来带动网带在清洗槽中来回振动,进而带动餐具在清洗液中振动起到较好的清洗作用。为避免网带振动时餐具的滑落,在网带周围安装有导流板12,可以起到防护作用。
箱体7是所有机构的载体并对它们起到支撑与固定作用。将控制器6安装在箱体7内部,可以更好地简化结构,节约空间。
3 控制系统设计
3.1 电机及其控制方式设计
洗碗机的动力源来自驱动电机,通过控制电机正反转实现网带的循环传送功能。目前,电机的种类及其控制方式比较多。在众多的电机类型中,伺服电机使用范围最广泛,所以设计选用伺服电机。对于伺服电机来说,它具有位置、转矩、速度3种控制策略[4]。通过比较并结合设计要求,最终选用位置控制方式,可以较好地保证控制精度,提高网带运行的稳定性。电机位置控制形态如图3所示。
3.2 电机选型设计
传动装置电机的功率PW由工作阻力和运转参数求定,即:

式中:F为工作阻力,取300 N;V为运转参数,取1 m·s-1。将数据带入式(1),可得电机的功率为0.3 kW。
最终,选用Y160M2-8型电机,参数如表1所示。
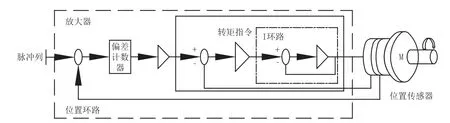
图3 伺服驱动器位置控制形态图

表1 Y160M2-8型电机参数
4 带传动的设计计算
4.1 皮带轮的选择
因为网带传送采用的是带传动机构,所以需要对同步带和带轮进行合理的选型设计[5]。目前,常见的皮带主要有普通V带和窄V带两种。前者适用于小功率工况,且相比后者摩擦系数大,传动更加稳定。所以,综合比较后最终选用普通V带轮进行传动。
4.2 带轮计算
第一,确定计算功率Pca:

式中:KA=1.1;P=0.3 kW。于是,有Pca=3.3 kW。
第二,选择带型。由上述结构可知,计算功率Pca为0.33 kW,再加上小带轮转速n1=1 400 r·min-1,故选用普通V带符合本次设计要求。
第三,确定带轮基准直径。初步暂定小带轮的基准直径dd2=71 mm,则验算带的速度V1为:

将相关数值带入式(3),可得V1≈5.2 m·s-1。
第四,确定中心距a0和带的基准长度Ld0:

式中:初始中心距a0=500 mm;基准直径dd1=71 mm,dd2=355 mm。将相关数据带入式(4),可得带的基准长度Ld0约为1 709.5 mm。查找机械设计手册,依据基准长度系列,选择带长为1 700 mm。
第五,验算主动轮上的包角α1,计算公式为:

第六,确定带的根数。

式中:对于包角系数Kα,查得Kα=0.91;对于长度系数KL,查得KL=1.18;单根V带的基本额定功率,P0=0.294 kW;ΔP0=0.03 kW;KA=1.1;P=0.3 kW。带入式(6),可得z=1。因此,取1根Z形窄V带。
第七,确定带得预紧力F0,有:

将相关数据带入式(7),可得(F0)min=58.14 N。
第八,计算带传动作用在轴上的力FP。

式中:z=1;F0=58.14 N;α=147.454°。将相关数据带入式(8),可得FP=115.34 N。
通过计算分析可知,设计采用Z形V带。为了使设计更合理,特选用Φ71 mm、Φ355 mm的带轮,中心距为500 mm,带长1 700 mm。
5 结语
自动洗碗机是一种可以替代人工自动完成餐具清洗功能的智能化设备。目前,我国市场上存在的洗碗机大都为家用类型,商用洗碗机种类较少,不利于我国餐饮业的发展。针对这一现状,在传统的洗碗机基础上进行升级改造,设计了一款适合商用的全自动超声波双层洗碗机。
(1)查阅资料了解洗碗机的结构原理和最新的研究进展,总结前人的设计经验并提出本次研究的必要性。
(2)在传统的洗碗机基础上升级改造,提出了全自动超声波洗碗机的整体设计方案,并对其系统组成及各部分功用进行详细介绍。
(3)针对超声波洗碗机的循环传送网带机构、循环喷淋机构以及超声波清洗槽机构等核心机构进行详细设计,并介绍其工作原理。
(4)针对洗碗机的传动部件进行详细设计,一方面对驱动电机的功率、型号及其控制方式进行合理的选型计算,另一方面针对带传动机构进行合理设计及计算,使设计更加完善合理。
本次设计是全自动双层超声波洗碗机,功能丰富,结构紧凑,操作简单,不仅加快了洗碗机的发展,而且全面促进了我国餐饮行业的高质量发展。