基于天通卫星移动通信系统的数据传输终端设计
2022-05-25刘士谦杨子涵
刘士谦,杨子涵
(广州海格通信集团股份有限公司,广州 510663)
0 引言
随着经济与科技的不断发展,各种无人化设备在不同的行业和领域得到了广泛的应用。如何实现远距离监控无人化设备,使其可以更为有效地进行高精度和高强度作业,成为提升无人化设备价值能力的关键。卫星移动通信系统作为一种新兴的通信方式,通过以卫星作为通信中继站,以具有大规模数据接收与处理能力的地面站作为主站,以数量众多的远端站作为数据采集终端,辅以完善的通信协议将这些设备组网,来实现数据的采集、传输、分析、存储和应用。该系统具有覆盖范围广、不受地域地形条件限制的特点,其组网灵活、通信成本与距离无关,可以很好地解决对无人化设备进行远距离监控的问题。本文设计一款基于天通一号卫星移动通信系统的数据传输终端,以满足对各类型无人化设备进行远距离监控的需要。
1 应用场景介绍
天通一号卫星移动通信系统,是我国自主研发的首个卫星移动通信系统。该系统由空间段、地面段和用户终端组成,共同构成天地一体化移动通信系统,可以为我国领土领海范围及周边、中东、非洲相关地区,以及太平洋、印度洋大部分海域用户提供全天候、全天时、稳定可靠的话音、短消息和数据等移动通信服务,填补我国移动卫星通信空白。
相对于国外移动卫星通信系统,天通一号系统具有以下特点。
(1)自主设计,安全可靠。天通一号卫星系统是我国自主设计、制造,拥有完整知识产权的卫星移动通信系统。系统的使用不受任何国外势力的影响和干扰。
(2)系统使用费用低。目前天通一号卫星系统由中国电信负责进行运营维护,其使用费用明显低于国外同类卫星通信系统。
(3)具备定位与通信双重功能。天通卫星终端具备卫星移动通信和北斗定位的双重功能,可同时为用户提供通信和位置服务。
天通无人设备监测系统结构如图1所示,分为空、地两层。空中是天通一号卫星通信系统,地面包括天通数据传输终端、天通卫星地面站、后台监控系统等设施。天通数据传输终端的通信采用寻星、拨号、建立话音链路通道、通信的方式进行监控数据的交互,从而实现后台监控系统对无人设备的远程监控。

图1 天通无人设备监测系统结构图
2 数据传输终端设计
2.1 终端硬件设计
本天通数据传输终端的组成原理框架如图2所示。终端设备由天线单元和卫星通信单元两部分组成,在结构上采用一体化的设计。其中天线单元位于终端的上部,终端的下部分则为卫星通信单元。

图2 终端组成原理框架
终端天线单元由GPS/BD天线和S移动天线组成,分别用于接收卫星定位信号和天通卫星信号,能适应各类复杂的工况环境。卫星通信单元则由CPU、天通卫星通信模块、GPS/BD模块、电源模块和存储单元(eMMC)等部分组成。其中,CPU选用国产全志F1C100S作为主控,与天通卫星通信模块间通过多路虚拟串口进行通信交互。在卫星通信方面,天通卫星通信模块、北斗定位模块,分别实现天通话音通路数据传输功能和北斗定位功能。
2.1.1 天通卫星通信模块
天通卫星通信模块作为天通数据传输终端的核心部件,承担着数据通信的重任,即:在通过天通卫星移动通信网络接收后台监控系统所发送的指令,供终端主控CPU分析使用的同时,将无人设备反馈的信息数据通过天通卫星移动通信网络传送给后台监控系统,从而实现对无人设备的闭环监控。
本天通数据传输终端选用HTDM2211E天通卫星通信模块,该模块集成基带芯片、射频芯片、功放及外围芯片等,提供语音和数据业务功能。射频部分由射频收发芯片、声表面波滤波器SAW、低噪放LNA、功放PA及收发开关SWITCH等组成,用于S波段卫通移动通信信号的收发。模块工作电压为3.8V,支持半双工通信,内置电源管理芯片,最大发射功率2W。采用MINI-PCIE接口设计,集成度高,利于终端小型化设计。
2.1.2 北斗定位模块
本天通数据传输终端选用国产UM220-IV双系统高性能GNSS模块提供北斗定位功能。该模块是UM220系列的第四代产品,外形尺寸紧凑,能够同时支持BD2 B1、GPSL1两个频点或者GPSL1、GLONASSL1两个频点,水平定位精度2.0m(双系统开阔天空环境),兼具低功耗(小于53mW)和极致小型化的特点。模块带有两路UART接口且支持NMEA0183数据格式,能够与绝大多数的MCU构成完整的定位接收机,在各类终端、手持设备,以及监控/导航领域都得到了广泛的应用。模块具体电路设计如图3所示。

图3 北斗定位模块电路
2.1.3 电源模块
为应对不同应用场景中供电方式的差异,天通数据传输终端电源模块支持以下两种供电方式:①对于能够采用外部POE电源进行供电的场景,由外部POE电源经对终端POE电源电压转换模块进行供电。由其转换生成5 V电压后,经过三块DC-DC电压管理转换芯片,生成合适的电压向终端内各模块供电;②对于无法采用外部POE电源进行供电的场景,则通过专用的电源接口直接向三块DC-DC电压管理转换芯片提供5 V的输入,以生成合适的电压向终端内各模块进行供电。
2.2 终端软件设计
2.2.1 终端程序总体设计
天通数据传输终端在硬件上采用了模块化设计,相应地在软件程序上也设计了对应的软件功能模块。天通数据传输终端采用Linux操作系统,终端控制软件的各个功能模块,均以任务的形式运行于Linux操作系统中,由操作系统依次调度执行:终端上电启动后,首先初始化各类总线和外设端口,以及终端正常运行所需的参数信息。初始化完成后,创建终端运行所需的各个软件功能模块,并交由操作系统调度执行。具体的程序模块组成,如图4所示。
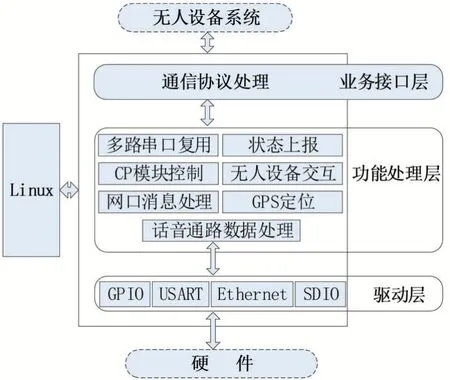
图4 终端程序模块图
2.2.2 话音通路数据传输功能设计
在无人设备应用过程中,最重要的是实现无人设备和后台监控系统间的远程实时监控。这就要求所有指令和数据的传输时延应当被控制在一个确定的范围内。任何无人设备的监控、通信应用,离开了实时性将会变得没有意义。当前天通一号卫星移动通信系统,既可以通过分组交换接入互联网传输数据,也可以通过电路交换直接进行数据传输。其中,分组交换方式普遍存在时延较大、实时性较差、数据传输过程中可能会出现失序、丢失等问题,无法很好地满足无人设备对实时性的要求。而电路交换的方式则在通信双方间建立一条独占的物理通路,数据传输直达、时延非常小,而且不存在失序的问题。因此,为确保数据传输的实时性,在通过天通一号卫星移动通信系统对无人设备进行远程监控时,将采用基于电路交换的方式进行通用数据的传输。
本终端所采用的HTDM2211E天通卫星通信模块支持采用电路交换的多语音业务。在其“语音压缩数据通过串口传输(声码器在外部)&加解密”功能中,CP模块从串口接收到数据后,通过卫星话音通路实现数据信息的实时传输。其中,主控程序和CP模块之间通过多路虚拟串口中的MUX9通道以115200 bps波特率进行数据信息的传输。主控程序每隔60 ms将数据传送到CP模块(1.2 K速率9 bytes/2.4 K速率18 bytes/4.0 K速率30 bytes);CP模块同样以60 ms为周期把数据(1.2 K速率9+4 byte/2.4 K速率18+4 bytes/4.0 K速率30+4 bytes,4 bytes预留字节)传送到主控程序中。在每个传送周期中,CP模块传送到主控程序的有效数据,前部都带有4个预留字节。
终端主控程序中,数据传输处理功能模块由接收处理任务和发送处理任务两部分组成。具体运行流程如图5所示。终端设备在开机后或语音业务发起前,由主控程序下发AT^VOICEMODE=<mode>指令,通知CP采用“语音压缩数据通过串口传输(声码器在外部)&加解密”业务模式,开启话音数据传输通路。然后初始化创建话音通路数据接收处理任务和话音通路数据发送任务,并开启发送任务中的发送处理定时器。
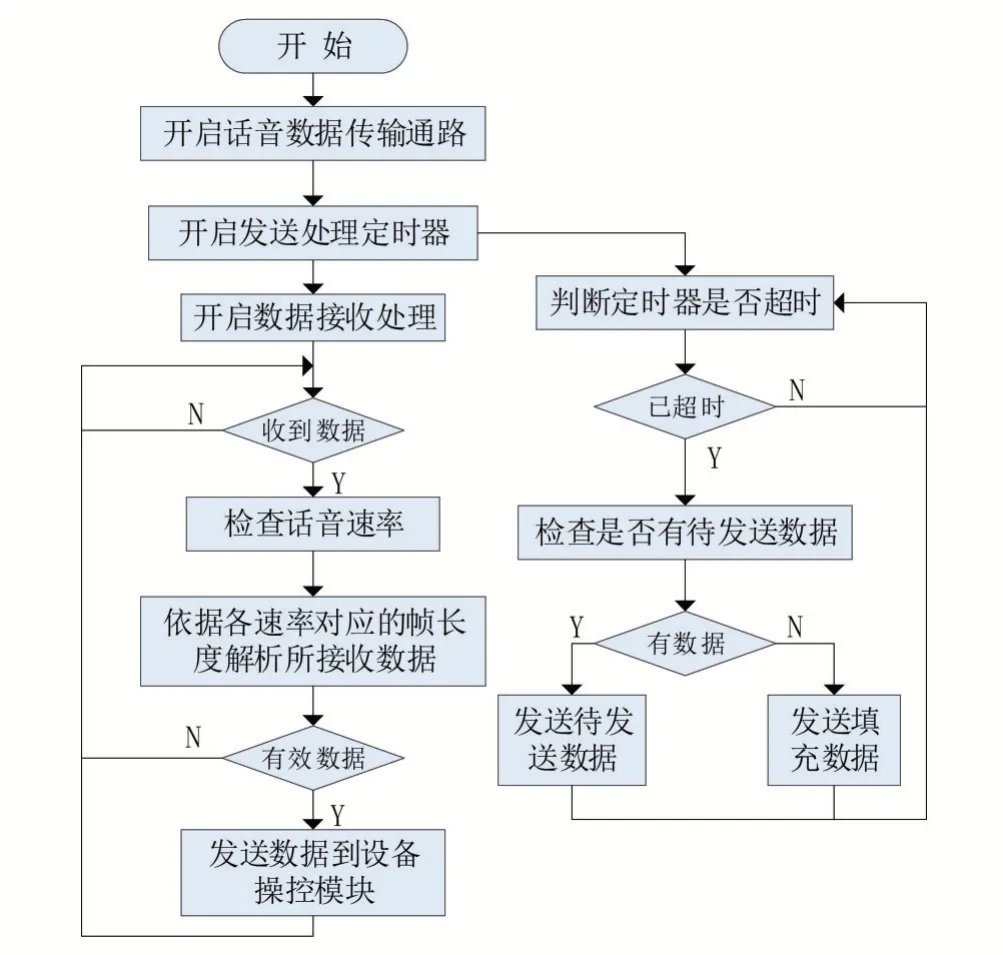
图5 话音通路数据处理模块运行流程
当主控程序中话音通路数据发送任务发送处理定时器计数超时后(60 ms),检查当前是否有待发送的数据信息。如有,则通过话音通路数据发送任务,向CP模块话音通路发送待传送数据信息;如果没有,则发送维持话音通路连接用的填充数据。发送完后重置发送处理定时器,等待新的超时到来时进行数据发送。
主控程序中话音通路数据接收处理任务在开启后,阻塞等待接收话音通路传输过来的数据,以执行数据接收处理操作。当接收到数据信息后,先检查当前话音通路所采用的语音速率,依照各语音速率对应的帧长度解析所接收到的数据。如果为有效数据信息,则发送到设备操控模块执行相应的操控作业后重新阻塞等待接收数据;如果为无效数据信息,则抛弃该数据,重新阻塞等待接收数据。
3 测试验证
选取A、B两台天通数据传输终端,通过上位机软件操控完成话音通信链路建立后,先由A终端向B终端发送测试数据。B终端在接收到数据后将其反向发送回A终端,并由A上报至上位机软件。通过分析上位机软件日志记录中发送、接收数据的时间戳,对通过话音通路进行通用数据传输的时延情况进行测试和计算。具体统计情况如表1所示。
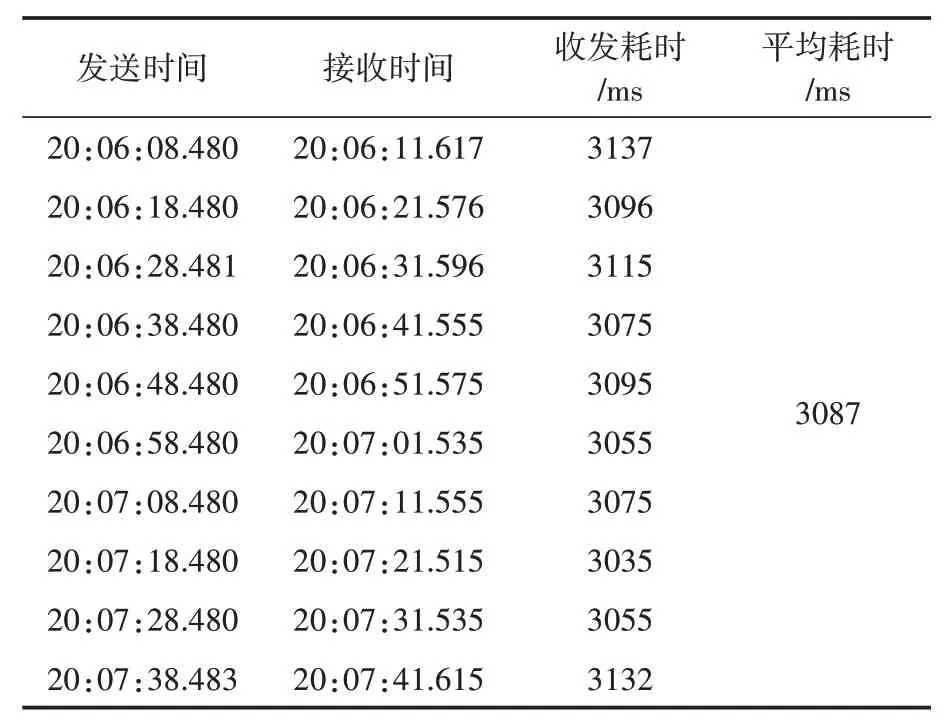
表1 数据传输时延情况统计表
以上测试结果显示,话音通路数据收发总时延平均值为3087 ms,折算成单向传输时延均值约为1543 ms。且在整个测试过程中,时延波动变化较小,能够较好地满足无人设备对数据传输的实时性要求。
4 结语
天通卫星移动通信系统终端设备普遍具有使用灵活、低功耗、保密性强等特点,为实现无人设备远距离监控提供了一个较好的解决方案。本文结合无人设备进行远距离监控的需求和天通卫星移动通信系统的特点,设计了一款天通数据传输终端。该终端组网灵活、不受地域地形条件限制、通信成本与距离无关,很好地解决对无人设备进行远距离监控的问题,有较高的使用价值和应用前景。
