陀螺飞轮转子的改进全矢动平衡方法及试验*
2022-05-21陈硕
陈硕,霍 鑫,赵 辉,姚 郁
(哈尔滨工业大学控制与仿真中心 哈尔滨,150080)
引言
陀螺飞轮是一种适用于微小航天器的新型姿态控制与测量一体化装置,其适应了当今微小航天器高集成度、轻小型化和低功耗的需求[1-2]。由于机械制造、装配等不理想因素,飞轮转子运行过程中存在多源多频振动问题,最主要的就是由不平衡带来的同频倾侧抖动[3]。通过基座传递到航天器的同频振动会影响整个航天器的姿态稳定精度[4-5]。陀螺飞轮转子不平衡可分为静不平衡和偶不平衡。由于陀螺飞轮转子可以等效为绕一个支撑点旋转,静不平衡在带来径向同频振动的同时,也会与支撑点形成力偶矩,和偶不平衡共同作用,使得转子在倾侧过程中产生抖动。目前工程上应用最广泛的动平衡方法主要有两种:影响系数法和模态平衡法[6],前者由于不依赖精确数学模型而更具易操作性。然而,传统平衡方法是基于各向同性刚度假设实现的[7],实际轴承系统在运行过程中表现出各向异性,不同方向上的响应出现差异。只采用某个方向上检测得到的信息来描述振动行为是不充分的,不能给出转子振动的全貌,各向异性刚度使传统平衡方法精度降低,严重时甚至产生误判[8]。
针对单一方向数据分析上的不足,利用双探头同源信息融合的频谱分析方法被提出,发展比较成熟的主要有全谱法[9]、全息谱法[10]和全矢谱法[11]。通过收集相互垂直两个方向的振动信息,Itzhak等[12]对非对称裂纹转子模型的响应特性进行了深入研究,但并未侧重于平衡方法。全息动平衡[13]将初始角相位矢量(initial phase vector,简称IPV)作为不平衡响应,通过角度补偿技术确定进动角和不平衡激励间的非线性关系[14]。Zhang 等[8]提出了能量等效圆的概念代替椭圆,但是没有对相角做出相关定义,只是将接近椭圆最小曲率的相位信息作为参考。Lang 等[15]通过对进动轨道形状差及其色散情况的讨论,定性地识别了在相同响应特征情况下不同的线性故障。由于全息谱采用图形描述,当特征频率过于集中时,容易造成轨迹混叠,椭圆尺寸较大也会导致分辨率不高,巩晓赟等[16]提出了全矢谱技术。全矢动平衡将椭圆的长半轴作为响应的幅值,椭圆相位角作为响应的相角,然后通过影响系数法实现不平衡的辨识,采用复数Fourier变换的快速算法提高了运算效率[17],但将椭圆长半轴作为响应振幅缺少理论依据。针对轴承信号监测问题,黄传金等[18]使用多维经验模态分解方法用于特征信息提取,将同源信号融合技术推广到非平稳信号故障诊断领域。
针对存在各向异性条件下陀螺飞轮转子偶不平衡辨识问题,笔者提出了一种基于等效振矢和移相圆的改进全矢动平衡方法。首先,建立陀螺飞轮转子动力学模型以及推导两轴倾侧角响应间的传递函数;其次,针对已有动平衡策略,基于能量守恒原则和椭圆进动信息构造等效振矢,通过纯试重响应引入移相圆概念,在此基础上提出改进全矢动平衡方法;最后,通过仿真和试验进行验证。
1 问题的描述
1.1 陀螺飞轮动力学模型
陀螺飞轮的剖视图如图1(a)所示[2]。通过控制转子的倾侧角度和旋转速度,可以实现和航天器间的三自由度动量交换。当转子处于闭环控制之下,根据力反馈原理可以求解航天器的两维姿态角速度。正交支撑结构采用了类似刚性万向节结构,包括一对内扭杆、一对外扭杆和一个平衡环,见图1(b)。根据第2 类拉格朗日方程,忽略基座运动条件下,壳体坐标系下的动力学方程为
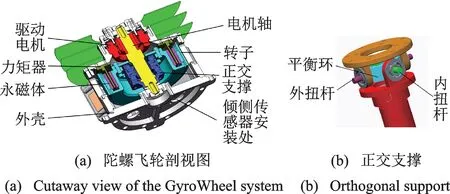
图1 陀螺飞轮结构图Fig.1 Mechanical structure of GyroWheel

其中:ϕx,ϕy为转子在壳体坐标系下的倾侧角;cx,cy分别为内、外扭杆的阻尼系数;kx,ky分别为内、外扭杆的抗扭刚度系数;Tcx,Tcy为两轴的控制力矩;ωs为电机旋转角速度;其他符号的含义可见文献[1]。
假设作用在转子上的偶不平衡表示为(U0,θ0),其中U0和θ0分别为偶不平衡的幅值和相位,其引入的等效干扰力矩为
偶不平衡干扰力矩作用下,设倾侧角响应为
其中:X和Y为响应幅值;φ1和φ2为响应的滞后角。
将式(2)和式(3)代入式(1),可得
其中:Jij,cij,kij(i,j=1,2)分别对应式(1)中惯性参数矩阵、阻尼系数矩阵和刚度系数矩阵中各项,如。
1.2 各向异性特性分析
转子与轴承通常为刚性接触,由于转子质量分布和轴承刚度分布不均匀,则k11≠k22,从而响应呈现各向异性。在陀螺飞轮系统中,为保证转子的支撑刚度,正交支撑结构的旋转自由度由角接触球轴承实现,故抗扭刚度kx=ky=0。由于摩擦和装配等不理想因素的存在,阻尼必然存在,如果两轴的阻尼系数不相等,两轴的滞后角就会有所差别。观察式(1),阻尼系数同样存在于刚度矩阵当中,称之为正交阻尼弹性力矩,内外扭杆的不等阻尼也表现为k12≠k21,因此陀螺飞轮倾侧响应呈现各向异性。
观察式(4),等号右端两轴不平衡激励仅是相位相差90°,利用复数转换关系即可消掉激励项。从式(4)可得两轴倾侧角响应间的传递函数为
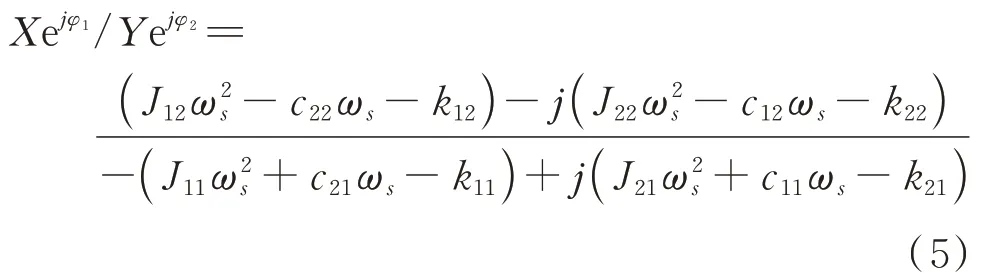
图2 给出了当cx固定时两轴倾侧角幅值比和滞后角相位差随cy变化的情况。当两轴的阻尼系数相等时,x轴和y轴的响应幅值比为1,相位差为90°,符合各向同性的特征。随着阻尼差值的增大,两轴的响应幅值比也随之增大,滞后角之差也不再维持在90°,各向异性特征愈发明显。图3 给出了样机运行过程中两轴倾侧角响应,其复合轨迹近似为椭圆,验证了陀螺飞轮中各向异性刚度假设是成立的。
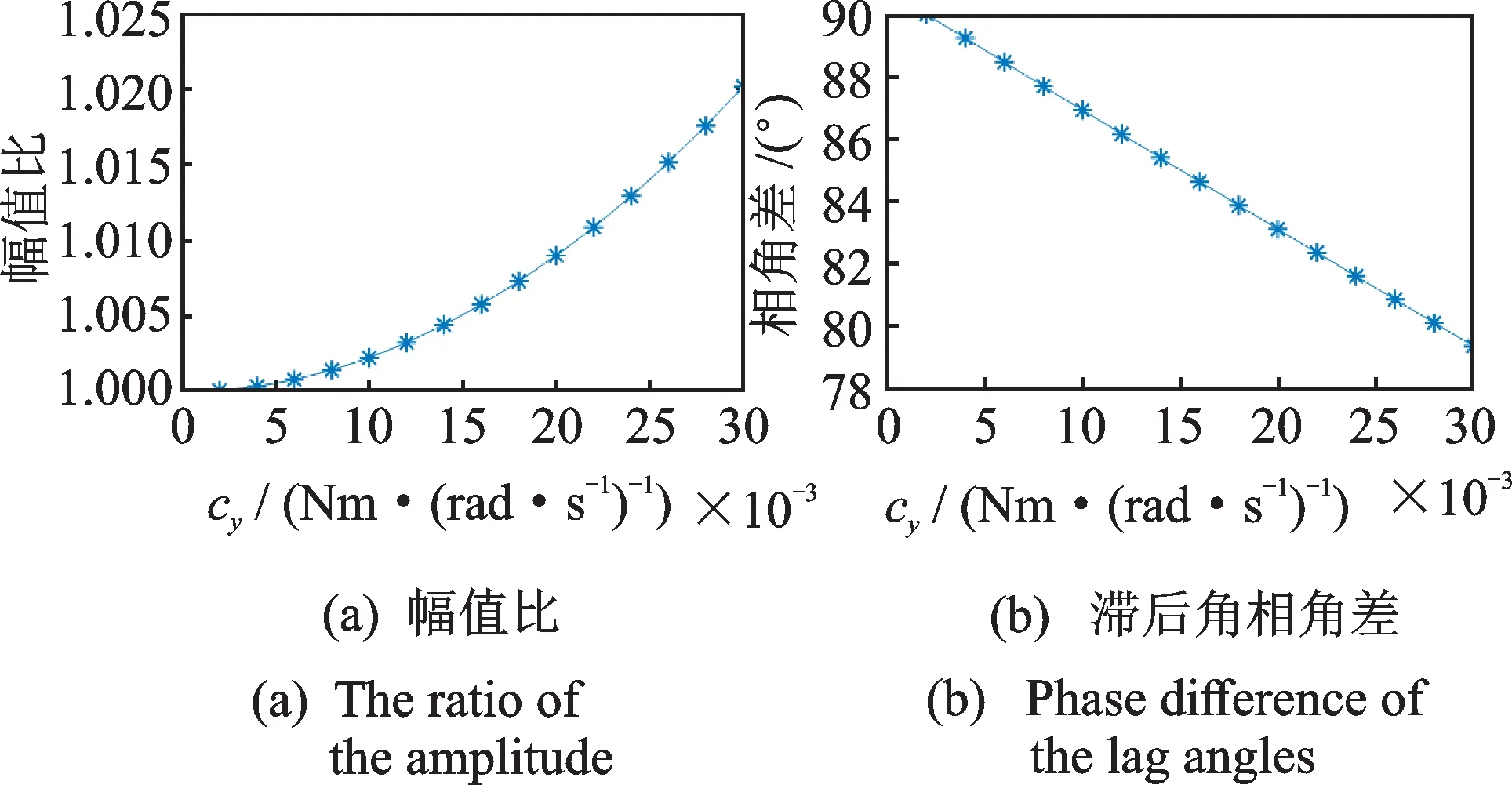
图2 倾侧角间响应特性Fig.2 Response characteristics between the tilting angles
图3 样机倾侧角响应Fig.3 Tilting angle responses of the GyroWheel prototype
2 改进全矢动平衡方法
2.1 全矢动平衡方法
转子动平衡的目标是为了辨识出原始不平衡幅值U0和相角θ0,并在转子调节机构位置添加对应试重实现不平衡校正。根据式(2),消去中间变量t,陀螺飞轮转子的同频倾侧轨迹为一椭圆,其椭圆长半轴RL和短半轴RS分别为
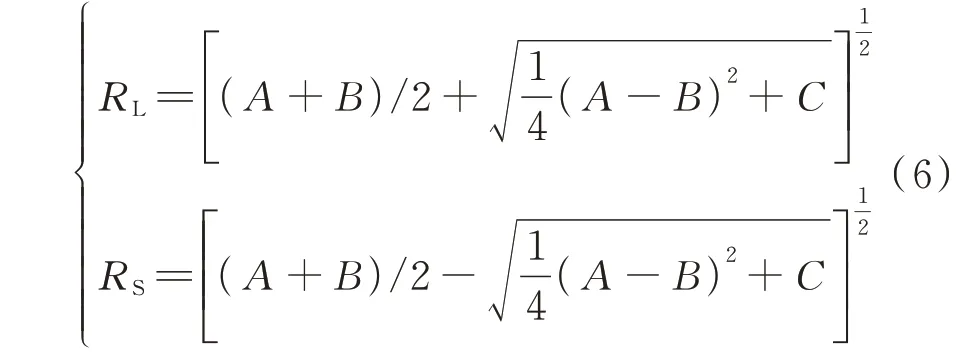
其中:A=X2;B=Y2;C=Xcosφ1Ycosφ2+Xsinφ1Ysinφ2。
以椭圆长半轴作为横轴,短半轴作为纵轴,绘制轨迹如图4 所示。选择初相点矢径作为椭圆的特征矢量,即t=0 时刻转频椭圆上的特征点,其与传感器安装位置无关。假设转子平衡面上的不平衡从x1点移动到x2点,转子正圆上的相位从α'移动到β',移动夹角为δ',初相点在转频椭圆上的相位从α移动到β,移动夹角为δ,可得
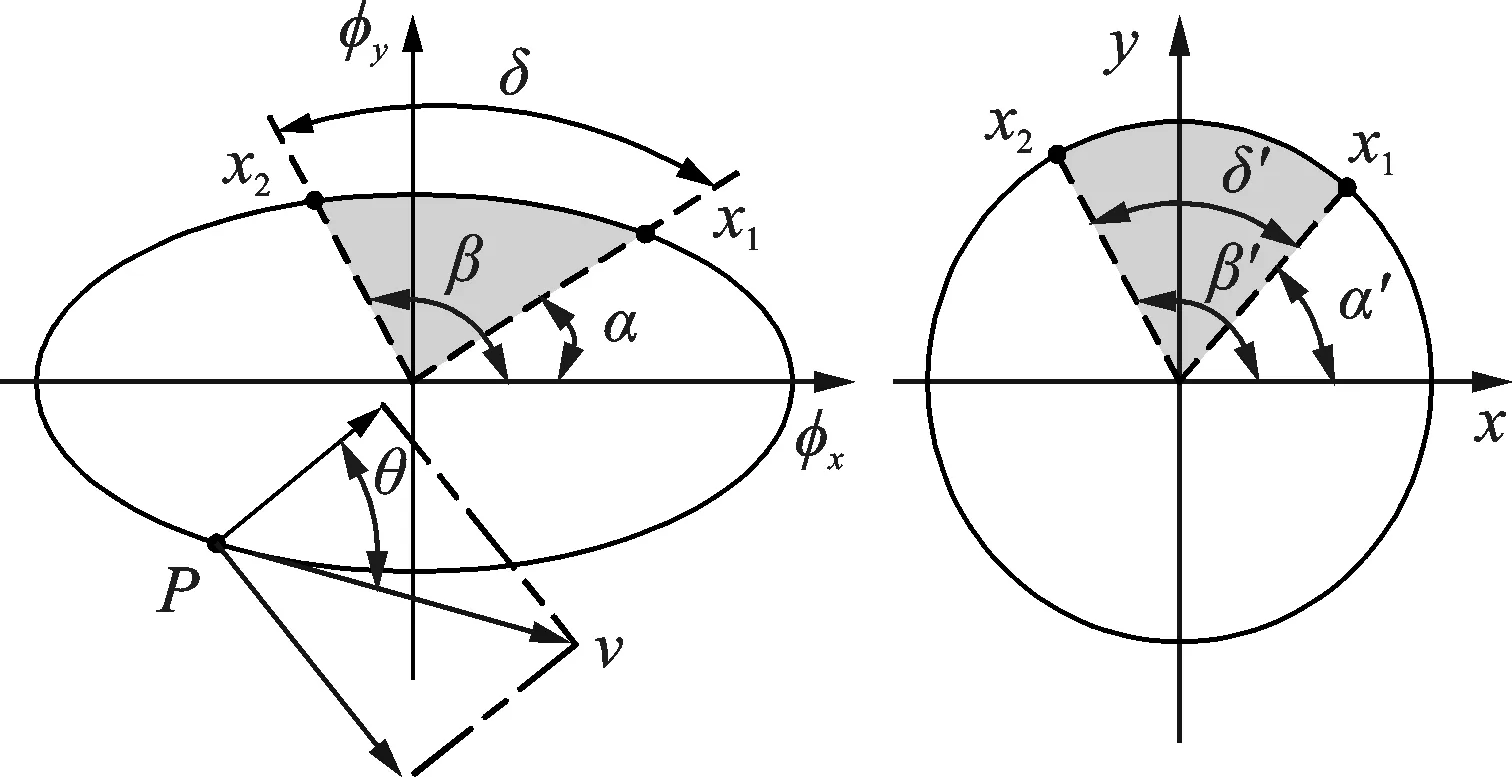
图4 初相角和旋转角的关系Fig.4 Relationship between the initial phase angle and the rotating angle
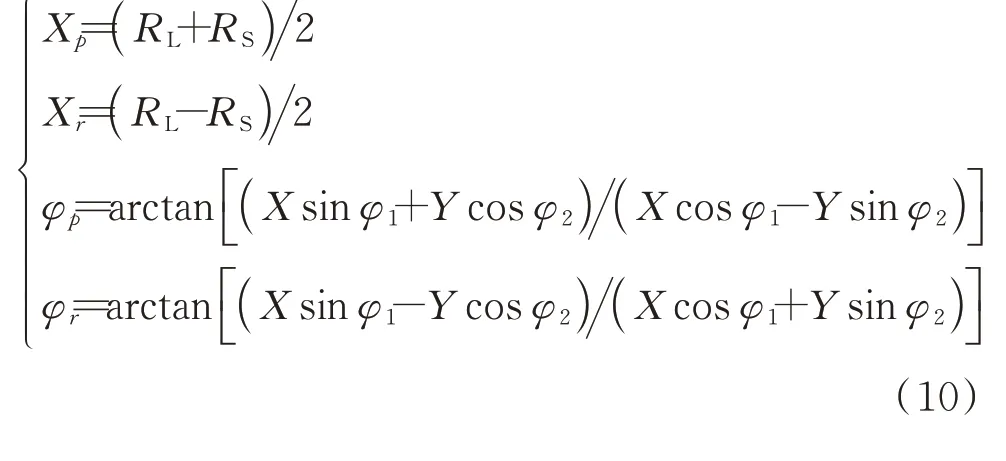
在各向异性的 条件下,式(7)和式(8)表明δ≠δ'。此时应用传统影响系数法求解相角必然存在偏差,且随着椭圆的偏心率的增大,误差也会随之增大。在运动学中,该倾侧角的运动轨迹可以看成是两个频率相同但旋转方向相反的两个进动圆的轨迹合成。记复平面上ϕ=ϕx+jϕy表示轨迹上的任意一点,则复系数运动方程可写为

其中:Xp和Xr分别为正进动圆和反进动圆的幅值;φp和φr分别为正进动圆和反进动圆的相角。
由式(3)得椭圆几何参数和进动圆之间的关系为
2.2 基于等效振矢和移相圆的全矢动平衡
全矢谱动平衡中将正进动圆相角定义为椭圆的相位角,将长轴半径RL作为响应幅值,椭圆相位角φp作为响应相位,然后再用影响系数法辨识转子的不平衡量。由于动平衡的最终目的是将不平衡引起的一倍频振动降至最低,以椭圆半长轴作为响应振幅不一定是最优的,且仅依据影响系数法公式缺乏对实际校正工作的指导。
在椭圆轨迹上,转子的转速并不恒定,而是时快时慢。如图4 所示,P点为椭圆轨迹上任一点,角速度 为ωs,线速度为v,则坐标为(RLcosωst,RSsinωst),与向量OP之间的夹角为θ,单位时间内OP扫过的面积为

根据几何关系,又有

将P点坐标代入式(12),则

式(13)表明,转子在单位时间内扫过面积与初始位置无关,仅与转速有关。在工业应用中,旋转振动能量常被用作评估不平衡的标准。从动态能量的观点来看,该区域大小代表不平衡的振动能量。如果总面积保持不变,椭圆轨道可以在不损失任何能量的情况下变换成另一个形状。因此椭圆轨迹可以等效转换成一个圆,等效圆半径为

文献[19]指出,当转子存在不平衡故障时,对反进动分量的影响远远小于正进动分量,且陀螺飞轮样机椭圆偏心率不大,说明反进动分量已经很小。利用正进动分量的相角,定义等效振矢

定义如下矩阵来表示椭圆特征

记初始时刻椭圆矩阵为M0,加试重后椭圆矩阵为M1,定义纯试重椭圆为

根据式(16)和式(17)即可计算初始等效振矢R0、添加试重后等效振矢R1和纯试重等效振矢Ru。若R1仍在初始等效圆上,即试重的添加仅是改变了矢量在圆轨迹上的位置,但没有改变圆轨迹的形状和大小,把这一系列Ru的终点连接起来,就构成了移相圆,如图5 所示。根据定义可知,移相圆与初始等效圆形状和大小相同,中心点为初始等效圆关于中心原点的镜像位置O'。
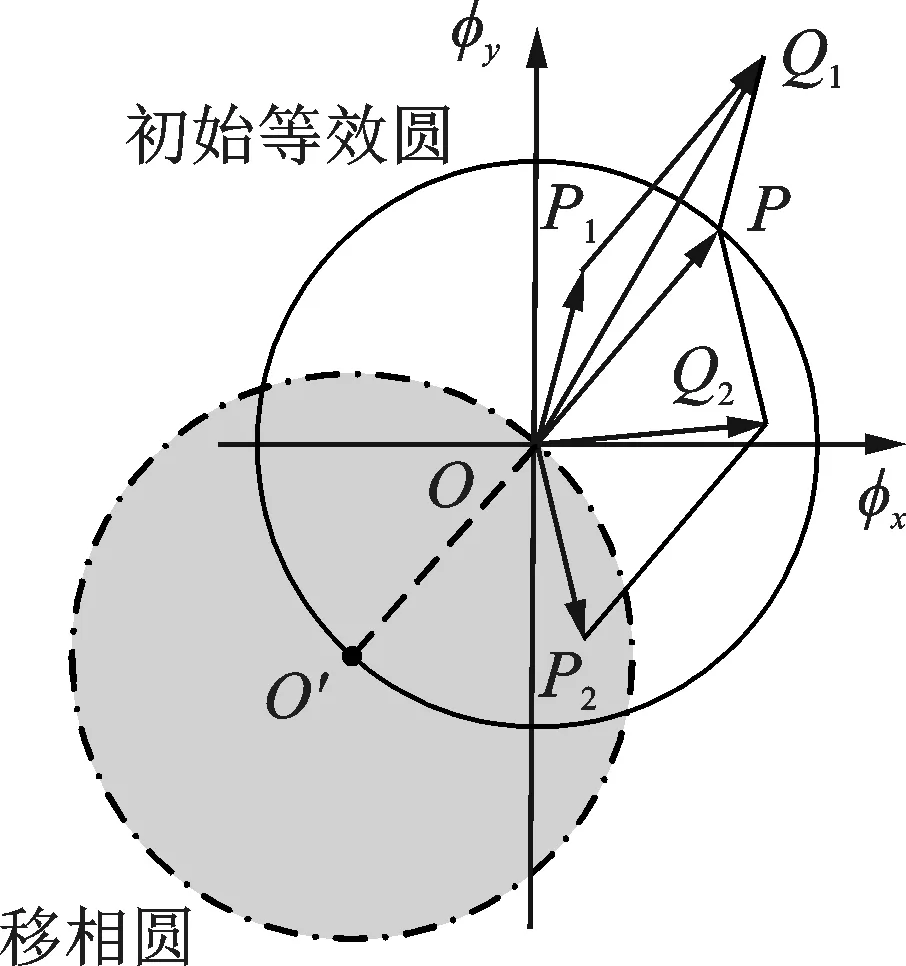
图5 移相圆Fig.5 Phase shift circle
根据移相圆的概念可以分析试重对振动的影响,进而指导不平衡的辨识与校正。如果Ru在移相圆外部,比如P1点,则复合不平衡振动Q1将增大;如果Ru在移相圆的内部,比如P2点,则复合不平衡振动Q2将减小;当Ru与O'重合时,则振动理论上衰减到零。基于等效振矢和移相圆的全矢动平衡方法实现步骤如下,偶不平衡辨识算法:
1)不添加试重运行陀螺飞轮,根据两个通道的传感器进行数据融合,计初始椭圆矩阵为M0,计算初始等效矢径R0=r0∠φp0;
2)在转子任意位置添加偶不平衡大小U1,定义此时位置的相角为φu,重新运行陀螺飞轮;
3)记复合振动和纯试重椭圆矩阵M1和Mu,计算纯试重等效矢径R1=r1∠φp1;
4)根据下式计算初始不平衡量U0∠θ0

改进全矢动平衡的几何原理如图6 所示,校正的目的是使得纯试重等效振矢与移相圆中的O'重合。显然,根据不平衡激励与振动响应之间的线性关系,只需要试重幅值变为原来的r1/r0倍,在正圆相角θ0的基础上逆时针旋转180°即可。
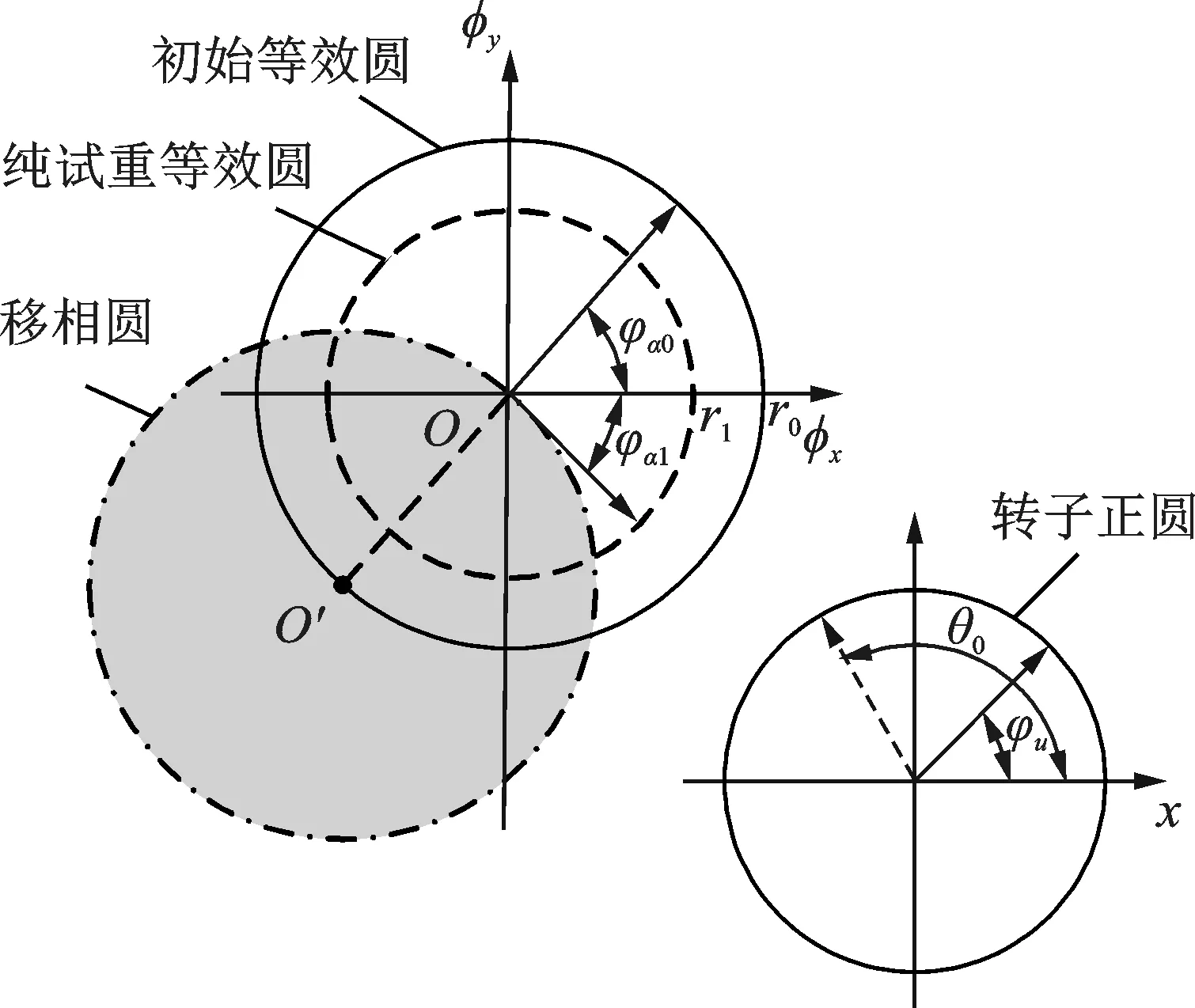
图6 改进全矢动平衡原理Fig.6 The principle of improve full vector dynamic balance
等效振矢是根据能量守恒定律对不同方向的振动进行平均,避免了刚度各向异性对不平衡辨识的影响,等效圆并不代表实际的运行轨迹。
3 陀螺飞轮偶不平衡辨识
参考陀螺飞轮样机结构,利用式(1)中动力学模型进行数值仿真,仿真参数如表1 所示。初始偶不平衡设置如表2 所示。在转子平面的对应位置如图7(a)所示,响应如图7(b)所示,其中△表示初相点矢量。观察图7(b),发现偶不平衡位置的变化并不会改变响应的轨迹。第1 组偶不平衡初相点相角为4.18°,第2 组偶不平衡初相点相角为44.56°,两者相角差为40.38°,与实际偶不平衡激励间的相角差不相等。该偏差说明传统的影响系数法并不适用于陀螺飞轮转子的偶不平衡辨识。
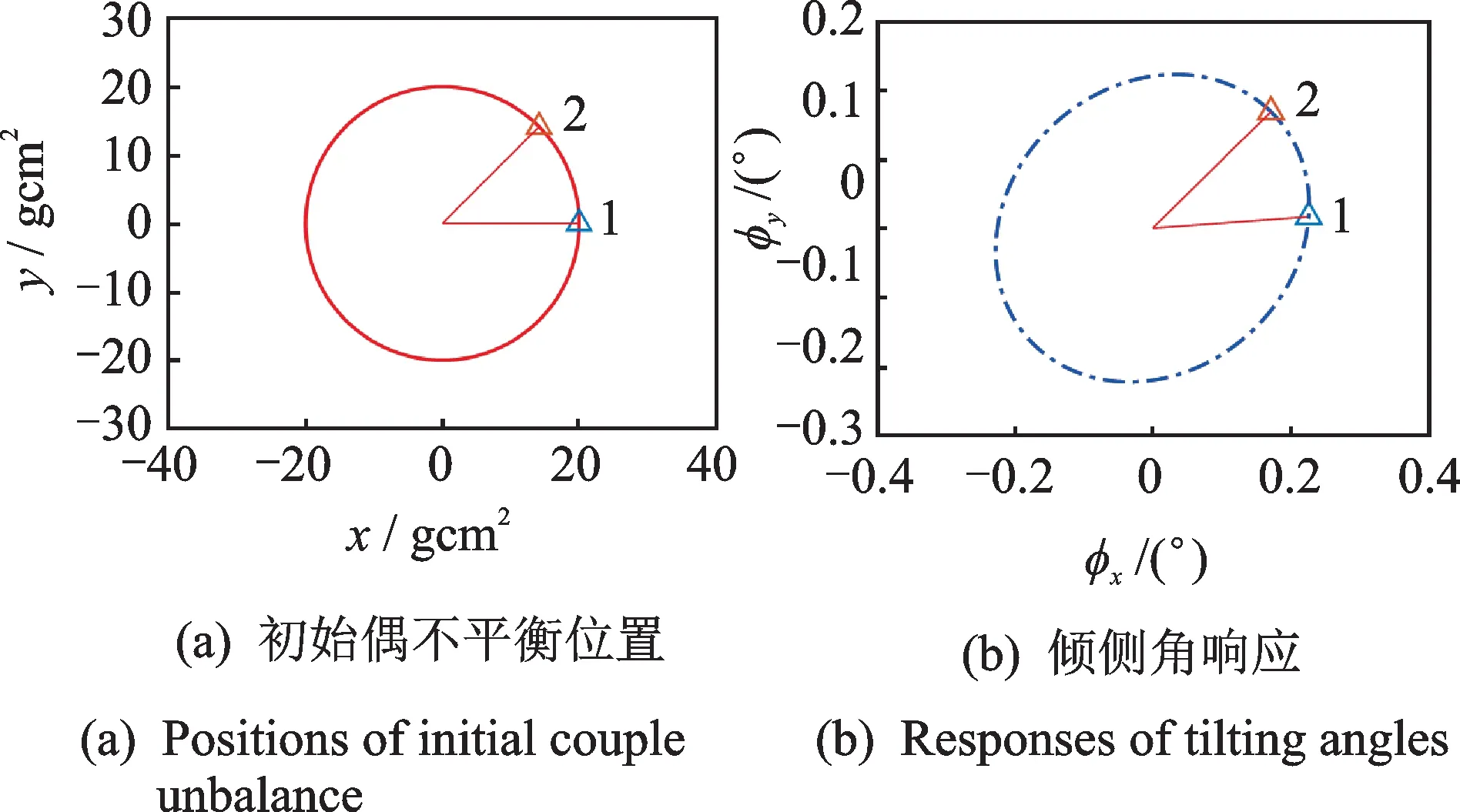
图7 偶不平衡激励与响应Fig.7 Excitation and responses of couple unbalance
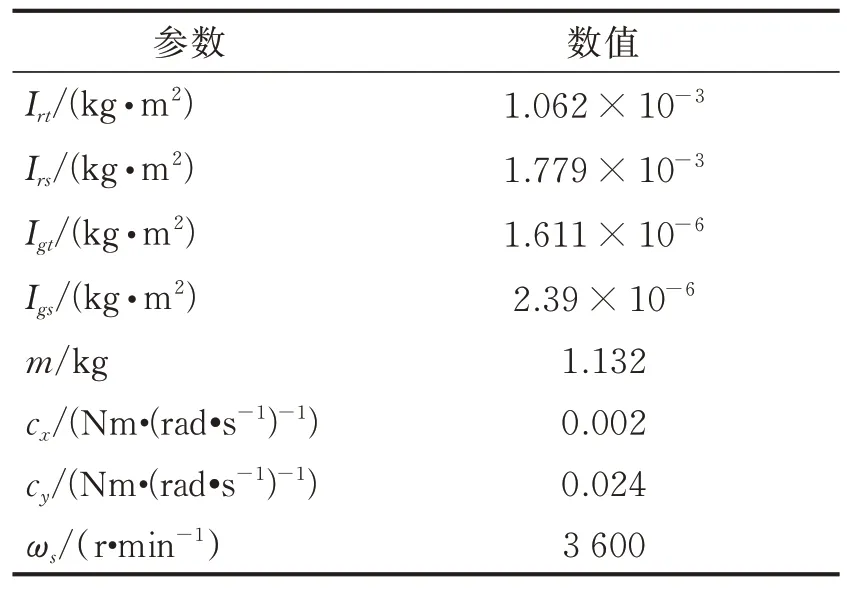
表1 仿真用陀螺飞轮相关参数Tab.1 Simulation parameters of GyroWheel
表2 仿真用初始偶不平衡Tab.2 Initial couple unbalance in the simulation
在第1 组偶不平衡的基础上,将其作为陀螺飞轮转子的初始不平衡,继续添加偶不平衡试重15 gcm2∠45°,利用笔者所提方法进行辨识,相关轨迹如图8 所示。初始振动等效振矢的相角是0°,纯响应等效振矢的相角是44.99°,二者间的相角差为44.99°,与不平衡试重激励的相角偏差非常小,可认为正进动圆相角与不平衡激励相角线性相关。幅值的估值可以通过等效圆半径来计算,辨识值为20.004 gcm2。
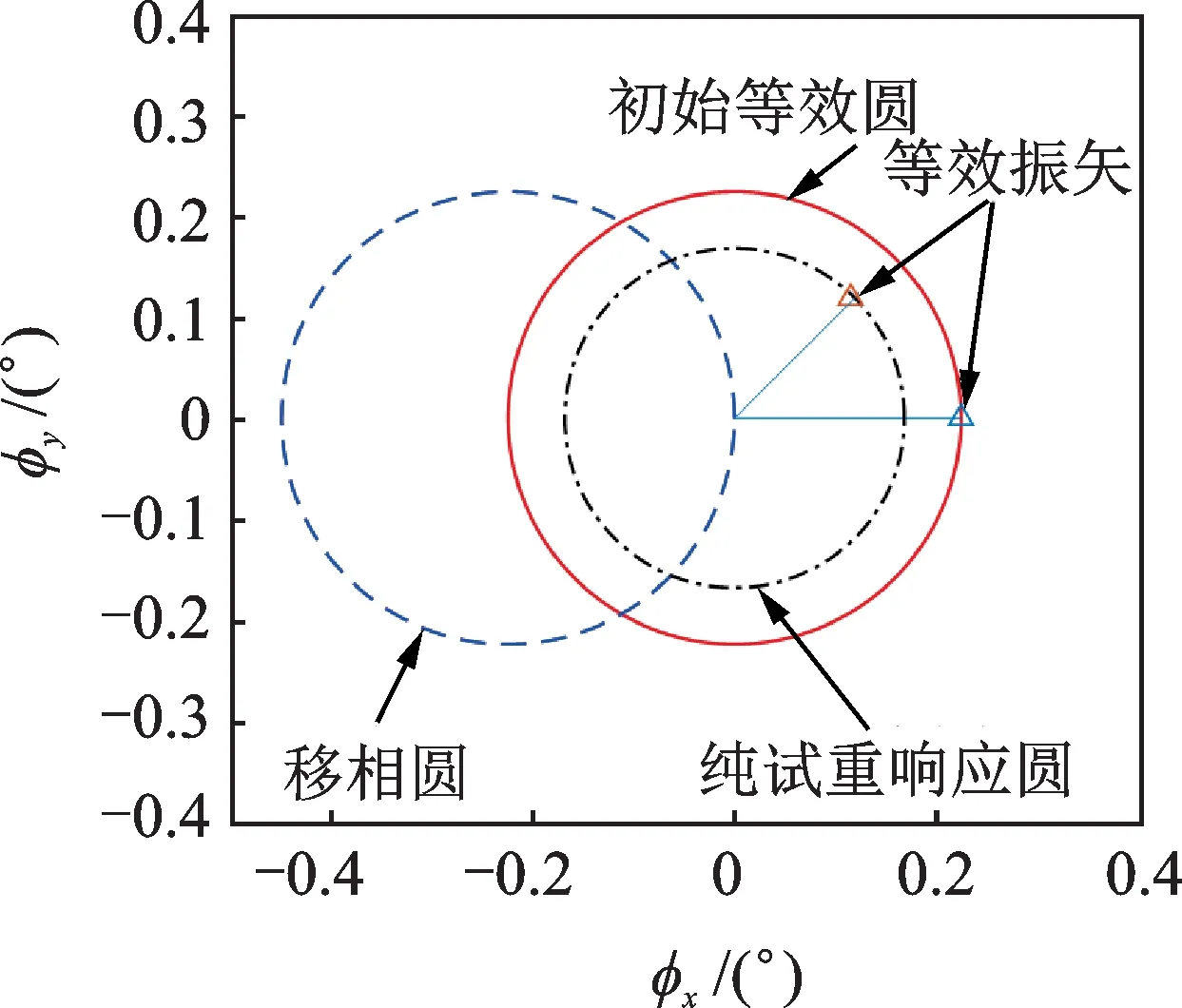
图8 偶不平衡量辨识Fig.8 Couple unbalance identification
图8 可以直观地指导偶不平衡的校正。根据等效振矢和移相圆的定义,只需试重逆时针旋转135.01°,大小变为原来的r1/r0倍即可。改变试重的幅值和位置,比较影响系数法、全息动平衡、全矢动平衡和本研究所提方法的辨识精度,相应的解算值见表3。其中,影响系数法使用的是x轴倾侧角数据。比较各方法的辨识结果,当运行轨迹为椭圆时,单通道影响系数法辨识结果的误差很大,由此体现了双通道信息融合的必要性。全息动平衡、全矢动平衡和本研究所提方法均很好地实现了偶不平衡的辨识。但全息动平衡法的辨识幅值更精确,全矢动平衡法的辨识相位更精确,本研究所提方法结合了二者的优势,幅值、相角和辨识精度均更高一些。

表3 不同方法辨识结果Tab.3 Identification results of different methods
4 试验验证
基于陀螺飞轮样机搭建的试验平台如图9(a)所示。利用工控机完成样机的数据采集、存储和闭环控制。软件程序采用通用Windows Xp 和实时扩展内核编写。数据通信使用Advantech PCL 板卡实现,采样频率为2 kHz,倾侧角通过涡流位移传感器解算获得。陀螺飞轮转子如图9(b)所示,在转子的上表面布置了若干个螺纹孔,通过装配不同质量和数量的螺钉,可以形成静不平衡,由于其不在中性面上,与支撑中心在离心力作用下等效为偶不平衡。为了验证不平衡辨识方法的有效性,试验暂时用此方式模拟偶不平衡。
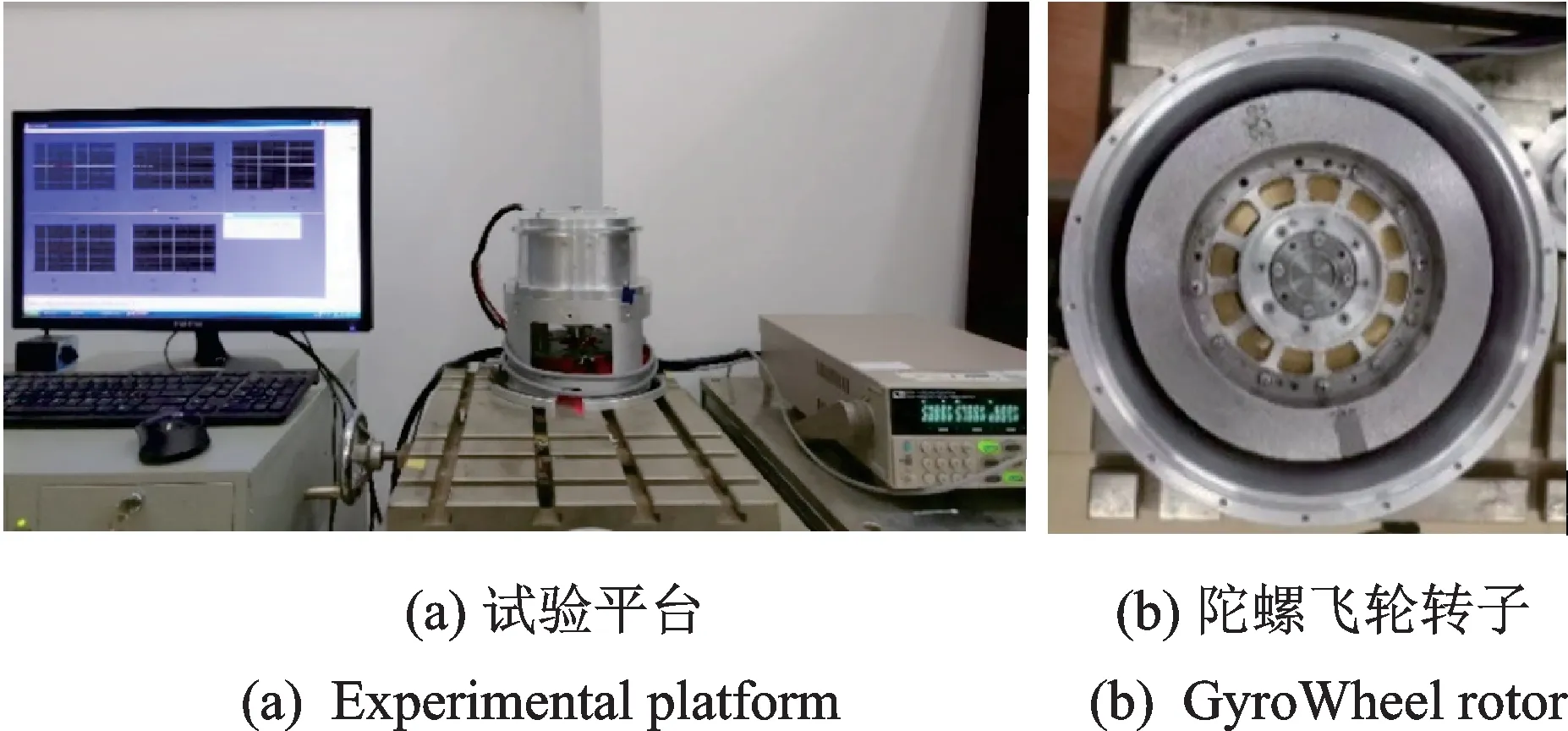
图9 陀螺飞轮及试验平台Fig.9 GyroWheel and experimental platform
设置陀螺飞轮工作转速为3 600 r/min,采集稳态工作时两轴倾侧角数据。在转子上表面任一位置处做好标记,定义该处相位为0°,在此位置添加试重,幅值为12 gcm2。根据本研究所提方法,计算等效振矢和移相圆,如图10 所示。在添加试重后,纯试重响应的等效振矢幅值明显大于初始时刻的等效振矢,说明添加试重量过大。初始时刻的等效振矢相角为75.97°,纯试重振矢相角为-81.36°。可以看出,当试重逆时针旋转337.33°时,即可实现偶不平衡的校正,校正量为8.05 gcm2。按照该结果重新添加试重,两轴时域响应如图11(a)所示。其中,红色虚线表示校正前的原始抖动,蓝色实现表示校正后的倾侧抖动。通过对比可以发现,校正后的抖动包络显著减小,且多频成分特征逐渐明显,说明了本研究所提方法的有效性。图11(b)给出了校正前后频域幅值的对比,发现两轴基频幅值衰减比例并不相同,也间接地说明了全矢谱方法弥补了单方向振动测量及辨识存在的缺陷。
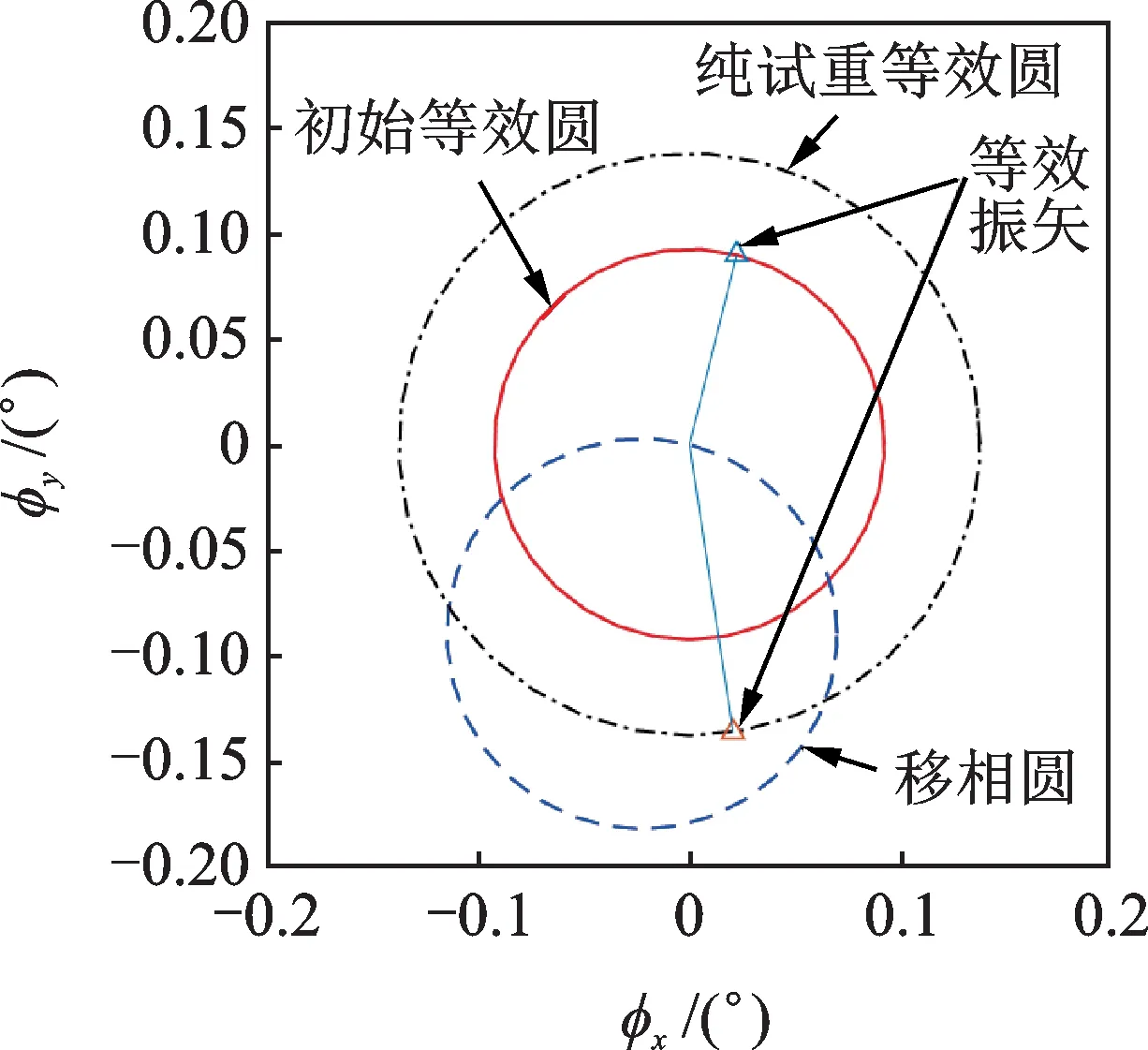
图10 样机等效振矢和移相圆Fig.10 Equivalent vibration vector and phase shift circle
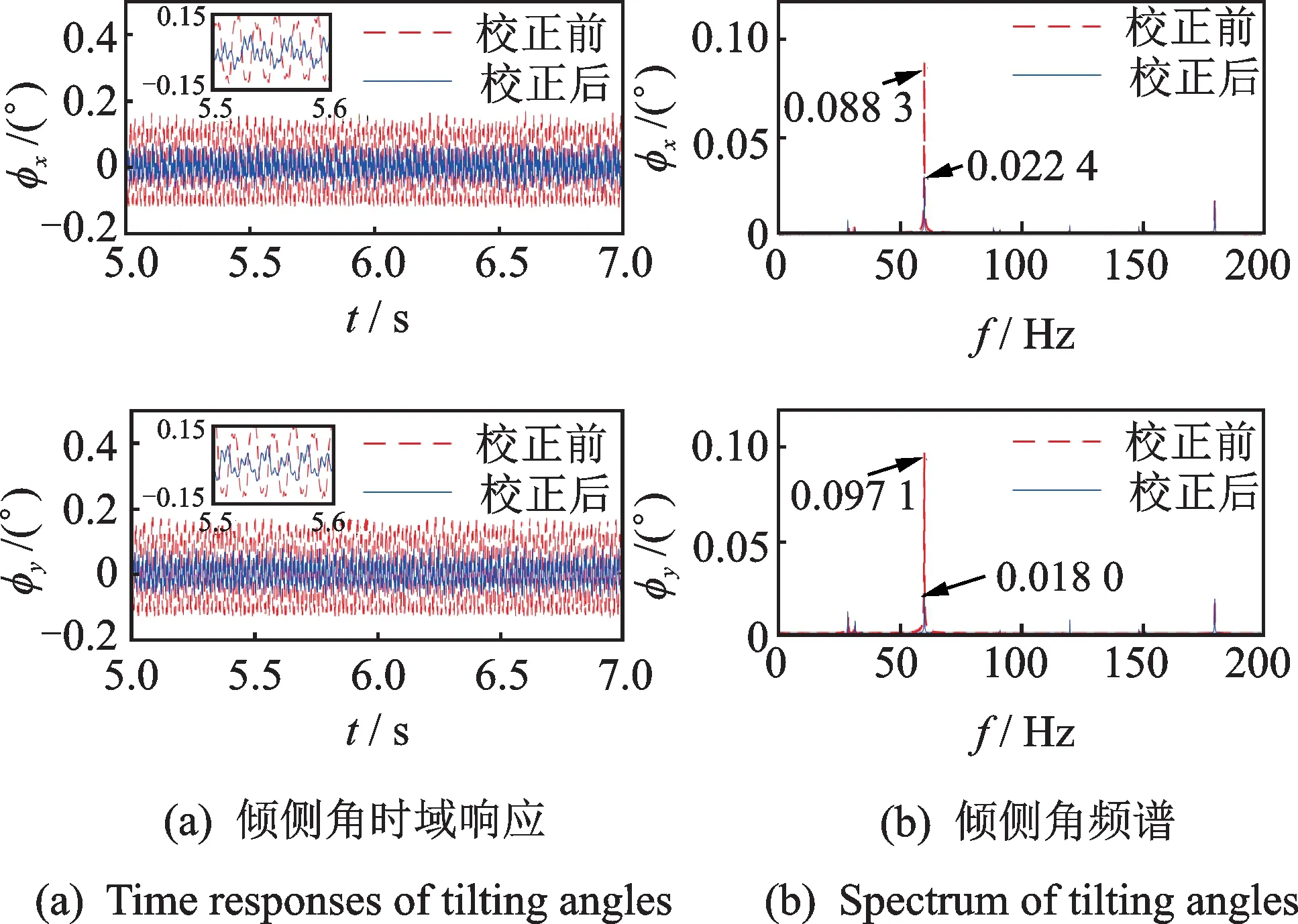
图11 校正前后倾侧角响应Fig.11 Responses of tiling angles before and after correction
不同方法计算的校正量如表4 所示,其中影响系数法用的x轴数据。按照对应的解算结果,以校正后的等效振矢幅值作为评判标准。受限于传感器分辨率和添加校正相角误差,后面3 种方法校正后振动能量差异不是特别明显。但是仍可看出,本研究提出的改进全矢动平衡方法的等效振矢是最小的,基频振动能量衰减了72.9%。
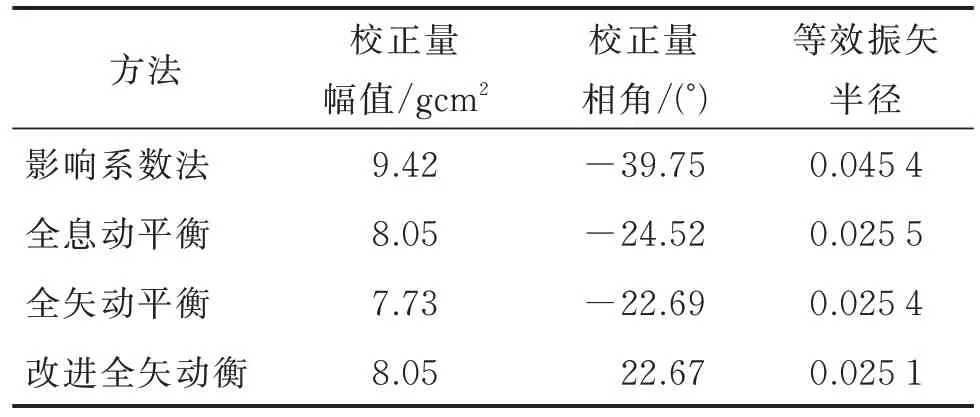
表4 不同方法计算的校正量Tab.4 Correction calculated by different methods
5 结束语
通过对比已有动平衡方法,发现全息动平衡进行解算时,需要多次计算相角并相互转换,容易造成计算误差且过程繁琐;全矢动平衡理论采用半长轴作为响应幅值,从减少振动能量的角度来讲不如本文采用的等效振矢半径。笔者通过引入移相圆概念,可以直观地指导偶不平衡的辨识。仿真和试验结果均表明当存在各向异性时,提出的改进全矢动平衡方法能完成陀螺飞轮偶不平衡的校正,样机校正后的基频振动能量衰减了72.9%。