适用于SPECT运动控制系统的EtherCAT-IO模块开发与研究
2022-05-20孟富国MENGFuguo
孟富国 MENG Fu-guo
(滨松光子科技(廊坊)有限公司,廊坊 065000)
0 引言
单光子发射计算机断层装置简称为SPECT。SPECT是目前临床上应用最广泛的核医学仪器,广泛应用于临床诊断和医学研究,其可以进行功能成像,反应器官动态特征,对疾病特别是肿瘤的早期诊断有重要意义。其成像原理是利用γ探测器采集事先引入人体的放射性核素进行跟踪、探测、扫描并由计算机分析重建,生成放射性分布的平面、断层及三维影像图。
随着SPECT快速发展,高分辨率和高效率探测是主要研究方向,目前发展形成了多探头、多角度、短采集距离(增加轮廓扫描传感器实现贴近人体扫描)等几个技术方向。这几个方向都离不开安全、高精准的运动控制系统,市场上常见的双探头SPECT及SPECT-CT核医学设备,常配备有十几个运动轴和近百个传感器,多轴联动及实时扫描过程的传感器能否实时反馈与控制对于运动控制系统的安全运行尤为重要。自主EtherCAT-IO模块实现了扩展模块(电机驱动器与传感器)的同步实时反馈与控制,提升了运控系统的稳定性与安全性。扩展模块的同步实时反馈,使得探测器连续贴近人体轮廓扫描探测成为可能,同时提升运动控制系统安全性。
1 SPECT运动系统简介
1.1 SPECT运动控制系统
SPECT运动控制系统,主要用于调整γ探测器姿态,使γ探测器对准被检测的器官。配备人体轮廓扫描传感器的可变角SPECT,运动轴运动中还需要根据实时反馈的人体轮廓位置,保持探头与人体在最近的距离,因此用于SPECT运动控制系统中专用的扩展模块(IO模块)尤为重要。
SPECT的运动控制系统由运动控制器、驱动器、电机、EtherCAT-IO模块、传感器及其他控制部件组成。其中EtherCAT-IO模块承担第三方(不支持EtherCAT通讯)伺服电机驱动器、步进电机驱动器、扩展的传感器等模块的控制与反馈通讯工作。
1.2 EtherCAT原理及组成
EtherCAT是一个现场总线系统。EtherCAT以太网技术在数据链路层采用了实时调度的软件核,并提供了过程数据传输的独立通道,提高了系统的实时性,非常适用于SPECT运动领域。
EtherCAT网络系统由主站与从站构成,目前SPECT设备上,EtherCAT网络系统由一个主站和多个从站组成(电机驱动器从站、IO从站)。EtherCAT网络具有广泛适用性、以太网的标准、高效率、高同步性等主要特点,充分利用了以太网的全双工特性。使用主从模式介质访问控制(MAC),主站发送以太网帧给各个从站,从站从数据帧中抽取数据或将数据插入数据帧。
在SPECT运动控制系统中,应用程序之间通常有两种数据交换形式,时间关键和非时间关键。非时间关键数据可以非周期性发送,命名为COE。时间关键表示特定的动作必须在确定时间内完成,通常周期性发送,称为周期性过程数据通讯,命名为PDO。EtherCAT主站与从站构成总线式PDO实时通讯网络,整个处理过程由主站和从站中的硬件实现。实时通讯中主、从站可分为自由运行模式和同步运行模式。自由模式下,主站与从站使用本地时钟构成实时通讯循环周期,与EtherCAT实时通讯部分构成异步通讯。同步模式下,实时通讯部分发出分布式同步时钟,主从站部分按照分布式同步时钟触发通讯,与EtherCAT实时通讯部分构成同步运行模式,进一步提高系统同步性。
2 EtherCAT-IO模块的设计
2.1 模块简述
基于EtheCAT的IO模块为EtherCAT从站,是一款基于EtherCAT网络总线的数字IO模块,它支持32路输入与32路输出。其外观见图1。
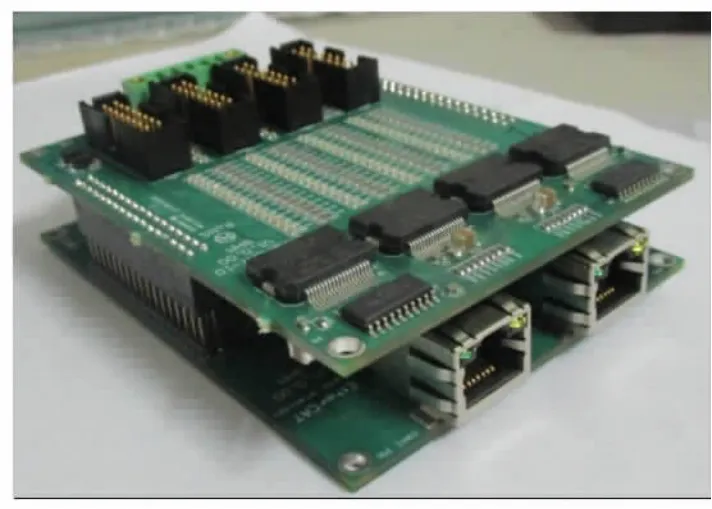
图1 EtheCAT的IO模块
2.2 模块组成
基于EtherCAT的IO模块开发分为两部:设备描述文件xml文件;IO模块硬件与程序;
①设备描述文件xml文件,用于主站识别从站并与从站建立通讯连接,描述内容包含从站厂商、模块类型、通讯数据详细信息、ESC配置信息等。
②IO模块硬件与程序,实现基于EtherCAT的COE、PDO通讯和终端IO控制两部分功能。硬件上主要由1)EtherCAT通讯部分、2)微处理单元、3)隔离驱动、4)电源系统构成。固件程序主要由MCU微处理单元中的ARM固件程序构成,整体构成见图2。
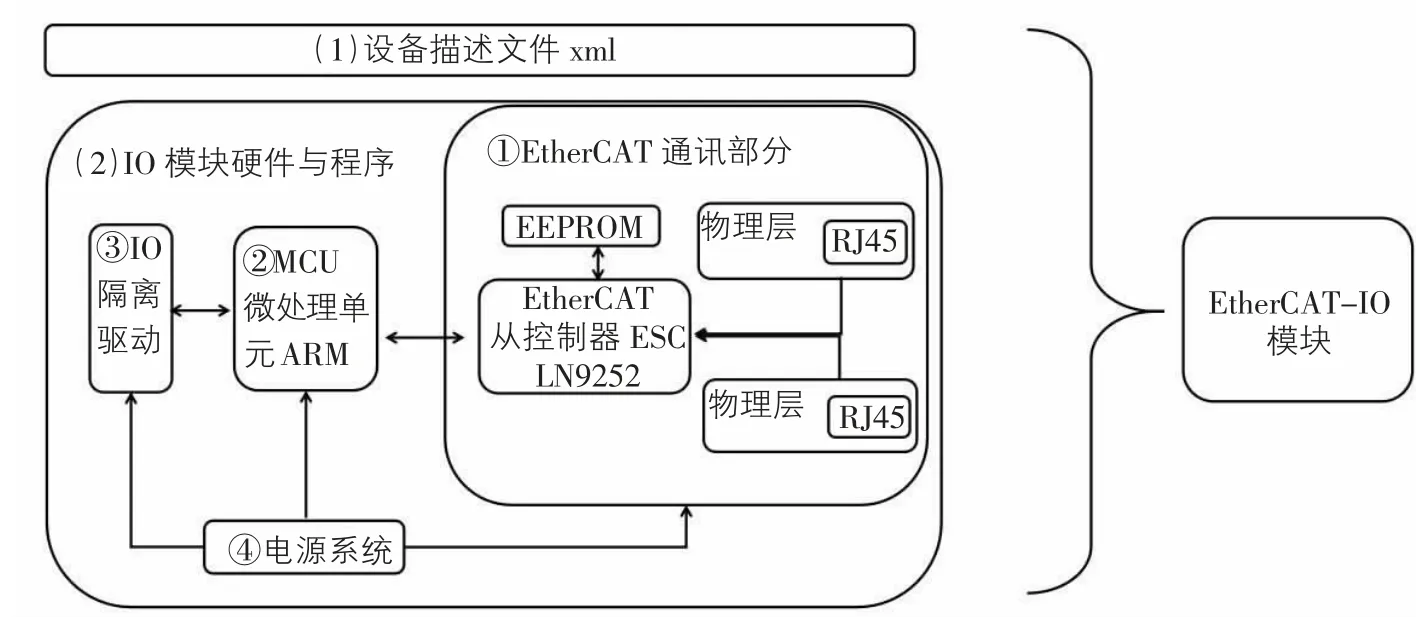
图2 基于EtherCAT的IO模块组成
3 模块设计
xml文件为IO从站设备描述文件,负责给EtherCAT主站提供从站详细描述信息,协助主站识别从站并与从站建立通讯连接,保证主站与从站通讯数据定义一致。xml文件描述了从站厂商、类型、版本、FMMU描述信息、通讯映射地址、通讯变量、通讯类型、ESC的EEPROM配置信息等。其中通讯数据定义按照CANopen协议中的行规CiA401定义。
①EtherCAT通讯部分由物理层器件、EtherCAT从站控制器ESC(EtherCAT Slave controller)组成。物理层器件负责实现EtherCAT的网络硬件连接,EtherCAT从站通讯控制器芯片ESC负责处理EtherCAT数据帧。
ESC使用双端口存储区实现EtherCAT主站与从站本地应用的数据交换,各个从站ESC按照各自在环路上的物理位置顺序移位读写数据帧。EtherCAT的报文经过从站时,ESC从报文中提取发送给自己的输出命令数据并将其存储到内部存储区,输入数据从内部存储区又被写到相对应的子报文中。数据的提取与插入是由数据链路层的硬件实现。控制器ESC选用了LAN芯片,该芯片物理层符合IEEE 802.3/802.3u标准,集成2个以太网PHY端口通讯,速度可达100Mbps,并同时支持HP Auto-MDIX功能、LAN唤醒、MII接口、EBUS接口。
②微处理单元由MCU和固件程序构成,主要负责处理EtherCAT通讯和外部传感器采集与控制任务。
微处理单元从ESC读取EtherCAT实时控制数据,数据通过解析,输出到IO端口,实现IO的控制功能;采样IO状态数据,数据解析合并,写入ESC中,通过EtherCAT实时通讯传送主站,实现IO状态采集反馈。
主要涉及MCU选型、电路设计、PCB设计、固件程序开发。
MCU选型结合IO模块需求及扩展电机驱动模块需求,IO模块对GPIO数量需求较大,需大于85个,电机驱动对芯片性能要求较高。综合考虑性价比,选用了拥有内部硬件除法器、单周期乘法器的高性能CortexTM-M4系列的ARM实现,工作频率72MHz,集成5种通讯接口SPI/I2C/CAN/USB/USART、2个12位ADC、支持外置看门狗、内部集成校准RTC、内部C循环冗余校验计算单元格,还有睡眠、停机和待机模式等。
固件程序设计开发,涉及存储同步管理通道、对象字典设计、PDO映射和分配、PDO数据解析、数据处理映射到PDO、获取IO状态、输出IO状态、DC开启及处理等部分开发。整体由12部分组成:1.初始化参数设置;2.存储同步管理通道配置;3.创建并初始化从站对象字典;4.设置从站回调功能;5.开始从站对象字典;6.PDO映射和分配;7.设置时间屏蔽寄存器;8.获取IO状态;9.数据处理映射到上传PDO;10.下载PDO数据解析;11.采集输出IO状态;12.DC开启及处理。
③IO隔离驱动模块主要有隔离、驱动、采样、保护电路四部分组成,配合GPIO实现终端设备的控制与检测。
IO隔离驱动模块主要包含与微处理器的IO隔离功能、IO输出功率放大功能、IO输入信号检测功能、IO输出过流、过热保护、短路、IO状态LED显示功能、抗反向电压冲击、兼容感性负载(继电器、蜂鸣器等)、宽电平范围IO输入口(7V~24V为高电平,0~5V为低电平)等功能。
微处理器GPIO口输出的电平先经过CMOS型三态缓冲门电路,提升功率驱动光耦合隔离,实现输出GPIO隔离,光耦合输出接入功率芯片,实现24V/600mA的驱动能力,用于控制终端设备;终端设备反馈信号经过限流及分压驱动光耦,输入到CMOS型三态缓冲门,接入微处理器GPIO输入口,实现终端设备的监测。此部分为硬件开发中的重点,IO隔离驱动部分整体框图见图3。
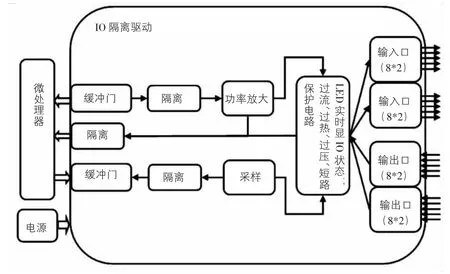
图3 IO隔离驱动部分整体框图
电源系统负责各个单元供电以及IO输出设备供电,保证能源供给,并防止各个单元串扰。
电源输入24V,输出24V、5V、3.3V、1.2V等几种电源,采用了DC-DC隔离电源方案,将整个模块分成了两个电源系统,分别为微处理部分、功率驱动部分。在PCB设计中将微处理与驱动部分设计为两块独立的PCB,电气间隔1cm以上,见图4 EtherCAT-IO电路板图。
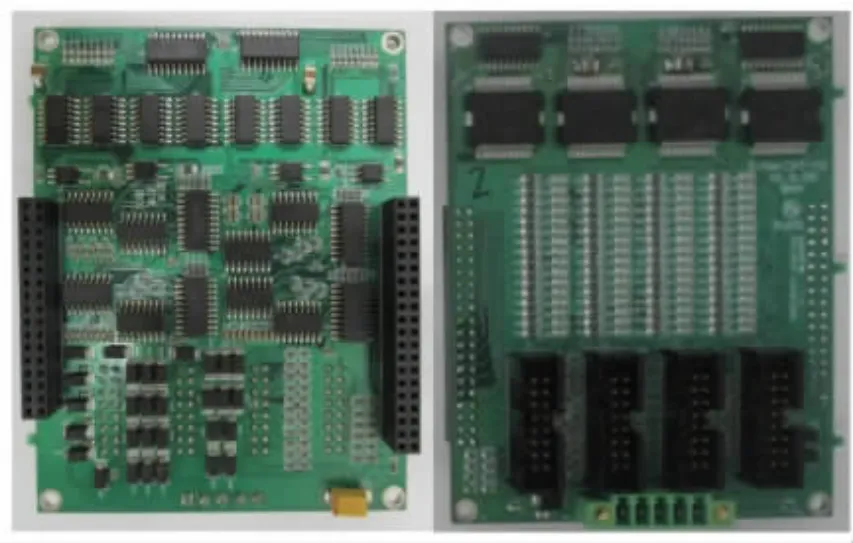
图4 EtherCAT-IO电路板图
4 EtherCAT-IO模块的测试与应用
4.1 功能与性能测试
功能与性能测试分为四部分测试,分别为硬件功能配置、输出IO功能性能、输入IO功能性能、EtherCAT通讯功能性能测试,详细见表1。
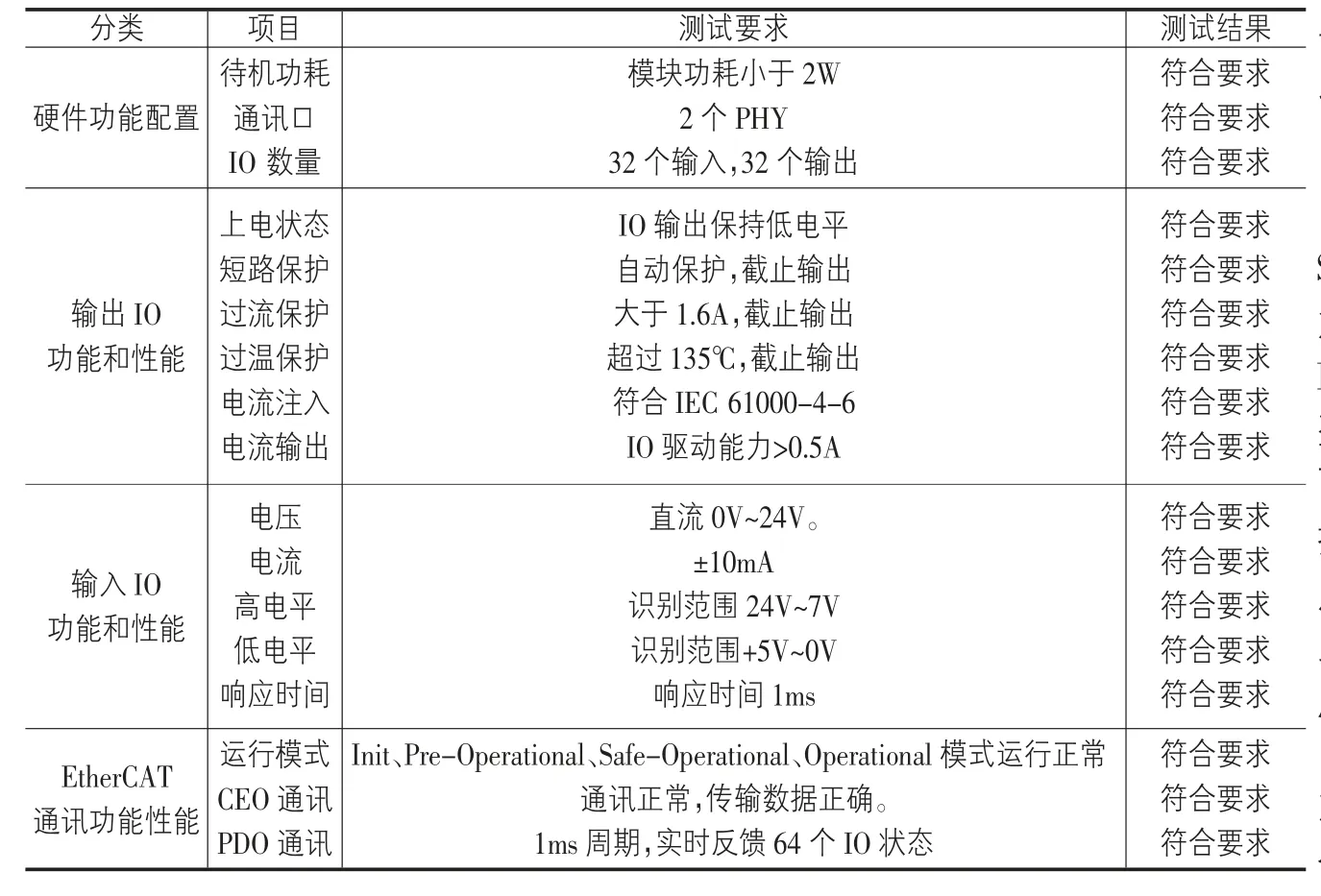
表1 功能与性能测试
测试结果:EtherCAT-IO模块硬件功能配置、输出IO功能性能、输入IO功能性能、EtherCAT通讯功能性能均符合要求。
4.2 应用测试结果
EtherCAT-IO模块应用在可变角SPECT上,应用EtherCAT-IO模块的可变角SPECT目前已完成三类医疗仪器注册。EtherCAT-IO模块承担四项工作,分别为整机床的两个伺服电机驱动器控制通讯、两个步进电机控制通讯、自主身体轮廓扫描传感器的实时监测控制、扩展的47个通用传感器的实时监测控制。应用评价基于此四个应用项目开展,进行了累计10万次应用测试监测,详细测试结果见表2。
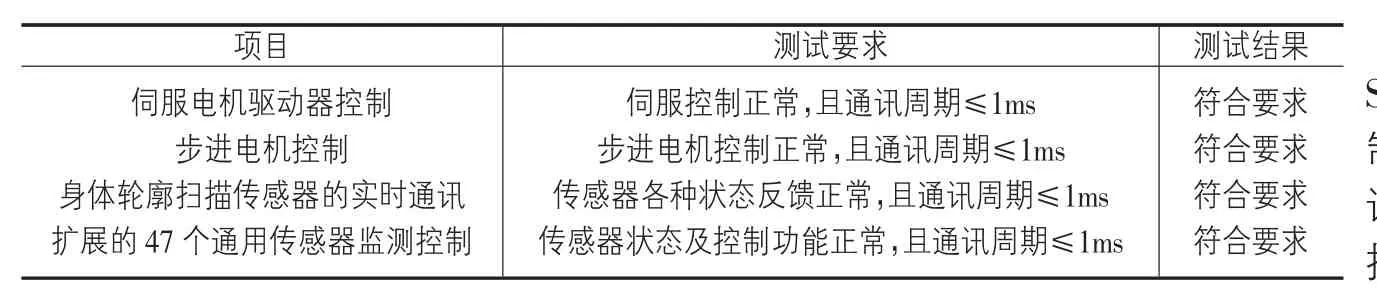
表2 应用测试
验证结果:EtherCAT-IO模块,在10万次应用测试中,运行正常,故障率为零,符合要求。
5 结论
本文介绍的EtherCAT-IO模块在SPECT运动控制系统中的应用,提升运动控制系统的安全性及稳定性,周期性的实时通讯功能确保了扩展的模块状态实时反馈与控制,尤其与可变角SPECT身体轮廓扫描传感器配合使用,极大的提升轮廓扫描传感器状态反馈到运动控制中心的时效性,同时不影响其它运动轴的实时控制与通讯。
实验证明,EtherCAT-IO模块工作稳定,可以在SPECT运动控制系统中广泛应用。