深海生物原位保温保压装置设计方案研究*
2022-05-20赵飞虎周鑫涛
许 可,赵飞虎,周鑫涛,罗 升
(中国船舶科学研究中心 深海载人装备国家重点实验室,江苏 无锡 214082)
0 引 言
深海生物科学研究、深海资源勘探等深海作业活动变得日趋频繁,从而引领水下装备的快速发展,其中缆控潜器(ROV)和载人潜水器是当前海洋探索研究最主要的工具,其可搭载各种探测设备快速、精确地到达各种深海复杂环境,进行高效勘探、科学考察和近海底取样作业[1-2]。然而目前通过深海潜器采集的各类深海生物存储在采样篮后,随着深海潜器的回收,样品也随其从深海提升至水面母船上,由于深海潜器从深海回收至水面母船大都需要耗费数小时的时间,并且在深海潜器从深海回收至水面的过程中,深海生物所处的外界海水压力在逐渐下降,温度在逐步上升,造成转移过程中深海生物的生物学特性已经发生了改变,失去了生物的原位特性,甚至丧失了试验室观测、培养及研究的价值[3]。现阶段国内外科学家在深海生物原位保真取样的技术领域仅实现了微生物的半主动保压和被动保温的技术突破[4-5],但该项技术的局限性较明显,无法实现多深度样品及长周期的保真存储。深海生物原位主动保压及主动保温技术的突破可以实现深海采集的各类样品从采集开始至提取到地面实验室分析前始终维持其原位特性,从而为深海生命科学探索和生物资源开发利用提供新的技术手段。
笔者重点研究了深海生物原位主动保压和主动保温的技术方法和工作流程,通过对该装置存储耐压结构的计算分析以及温控系统、保压系统和监控系统的设计,得出了基于潜水器搭载的深海生物原位保温保压装置的技术方案,为潜水器多深度采集的生物样品的长周期原位保真存储提供了参考。
1 深海生物原位保温保压装置主要组成
深海生物原位保温保压装置主要由耐压壳体、启闭舱口盖、温控系统、保压系统、监控系统组成如图1所示,其中耐压壳体是深海生物原位保温保压装置最主要的存储容器结构,承受外侧及内部高压海水的压力,并承载所有挂载设备和仪器的重量,是整个装置的主体;启闭舱口盖可以实现自动开启、关闭和锁紧,启闭舱口盖的锁紧和密封是整个装置保温和保压效果实现的关键;温控系统主要实现装置的保温功能,其工作原理为热电制冷,利用半导体制冷片进行控温,主要用来精确控制壳体内的海水及样品温度,以维持原位采集样品的温度特性;保压系统主要由以充满高压氮气的补偿器和连接电磁溢流阀的储水箱构成,前者可以在装置采样上浮后补偿耐压壳体内降低的压力,后者能在装置采样下潜时卸掉耐压壳体收缩导致的内部增大的压力。
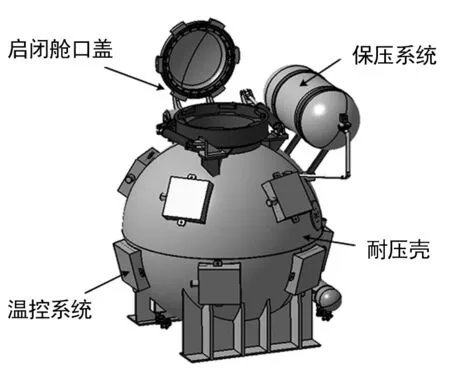
图1 深海生物原位保温保压装置组成
2 主要技术指标及功能要求
2.1 主要技术指标
工作深度:0~1 500 m;保压范围:0~15 MPa;保温范围:0~10 ℃。
2.2 功能要求
深海生物原位保温保压装置在深海特定深度完成采样后,能够对采集的样品进行存储,并持续保温和持续保压。为实现上述功能,装置需具备可调节温度范围的保温功能,具备样品原位压力的保持功能,以及具有一定容积的样品存储功能,并具有内部压力和内部温度的实时监测功能,同时装置需具备舱口盖的自动启闭功能。
3 技术方案
3.1 耐压壳
耐压壳是深海生物原位保温保压装置最主要的耐压结构,承受外侧及内部高压海水的压力,并承载所有挂载设备和仪器的重量,是整个装置的主体,外形呈球状,底部焊接有安装基座。外形如图2所示。
耐压壳内部直径:φ1 200 mm;舱口盖开孔透光直径:φ450 mm;穿舱件开孔透光直径:φ200 mm;耐压壳材料:00Cr25Ni7Mo4N(双相不锈钢2507),屈服强度550 MPa,抗拉强度795 MPa,弹性模量200 GPa,泊松比0.3。
深海生物原位保温保压装置的最大工作水深是1 500 m,而耐压壳既承受内压也承受外压,所以取计算压力为1.5倍最大工作压力,即22.5 MPa。按GJB/Z21A-2001规范《潜艇结构设计计算方法》,球形耐压结构最小厚度计算见下式:
tm=PjRc/(0.8σs)
(1)
式中:tm为球壳最小厚度;Pj为计算压力;σs为屈服强度;Rc为球壳部分的中面半径,600+0.5tm。
因此,计算可知最小厚度为31.5 mm,设计厚度同样取31.5 mm。
在Abaqus软件中对耐压壳体进行有限元计算,为便于计算,降低模型复杂程度,在几乎不影响整体计算结果的前提下,对整体模型进行了适当的结构简化,模型采用C3DR8实体单元进行计算分析,并保证所有厚度方向单元个数不少于4个,单元尺寸小于20 mm。载荷边界条件:整体模型非开孔位置施加计算压力,开孔位置压力载荷采用面积等效办法在开孔周边密封面等安装面施加等效压力载荷,如图3所示。
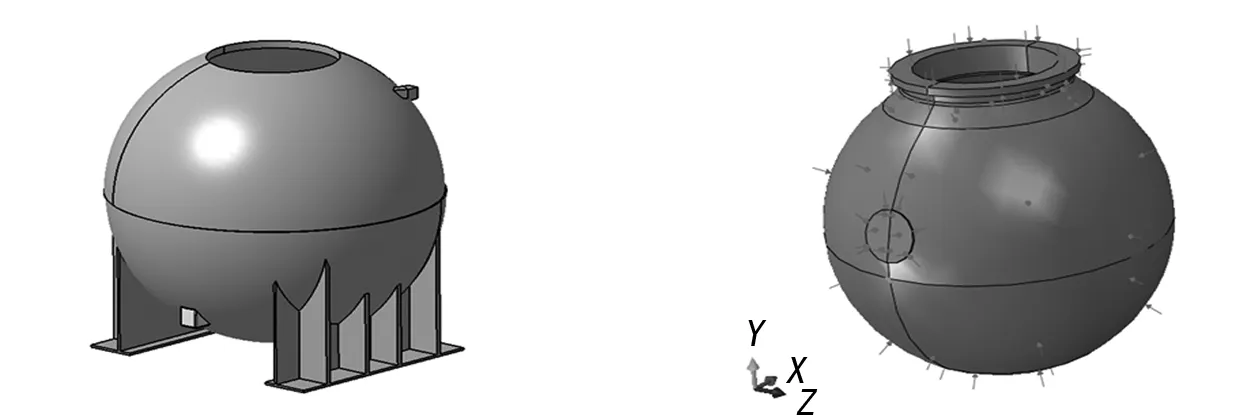
图2 耐压外壳 图3 边界条件及载荷情况
耐压壳体在22.5 MPa外压作用下的应力响应结果如图4所示,从图中可看出耐压壳体整体在22.5 MPa外压作用下,最高应力为407.2 MPa,主要分布在出入舱口盖围栏与球壳连接处舱内侧,其余连接开孔等连接过度处的典型位置应力水平均小于309.6 MPa。耐压壳体在22.5 MPa内压作用下的应力响应结果如图5所示。
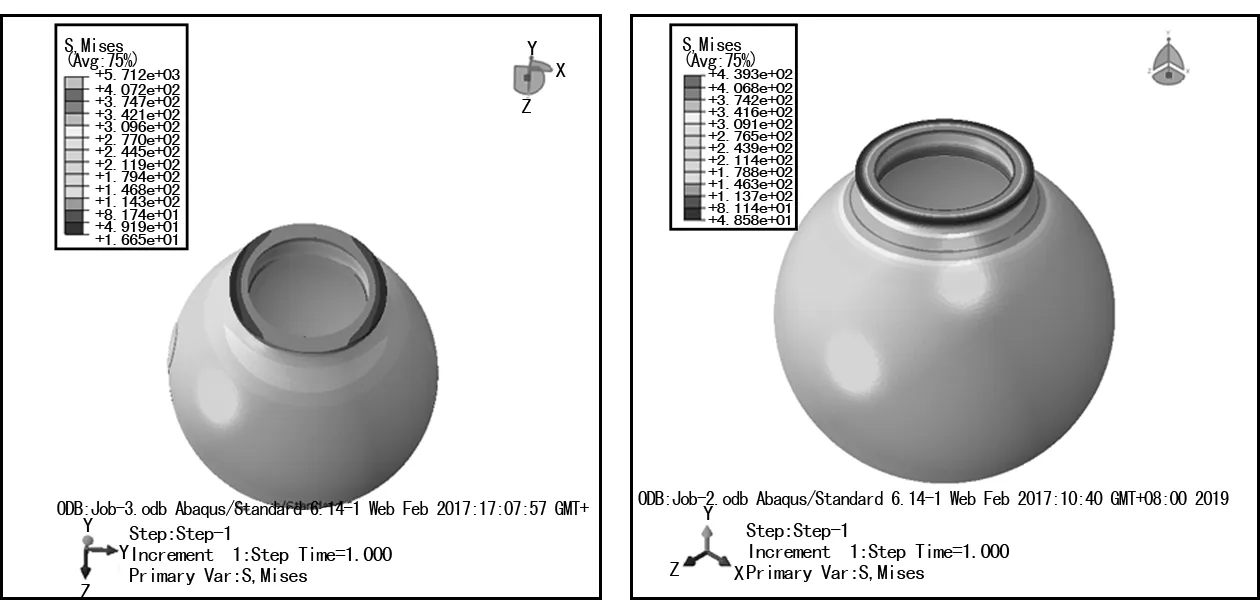
图4 22.5 MPa外压下应力云图 图5 22.5 MPa内压下应力云图
从图中可看出耐压壳整体在22.5 MPa内压作用下,最高应力为439.3 MPa,主要分布在出入舱口盖围栏与球壳连接处舱内侧,其余连接开孔等连接过度处的典型位置应力水平均小于309.1 MPa。从分析的结果可以看出耐压壳体在承受22.5 MPa内压和外压下,最高应力为439.3 MPa,满足小于1.15σs(632.5 MPa)的要求。
3.2 启闭舱口盖
启闭舱口盖主要由球冠形盖板、压紧环、密封件、回转支撑板、回转轴座、锁紧环、锁紧电动缸、电动缸基座I、基座齿圈、回转轴、回转臂、启闭电动缸、电动缸基座II、启闭接近开关和锁紧接近开关组成,通过驱动启闭电动缸和锁紧电动缸可以实现舱口盖的启闭和锁紧与解锁,并根据到位接近开关的反馈信号判断舱口盖是否关闭到位和锁紧到位。启闭舱口盖的系统组成如图6所示。
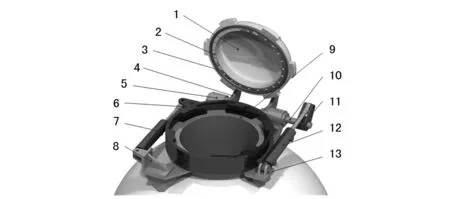
图6 启闭舱口盖系统组成图1.球冠形盖板 2.压紧环 3.密封件 4.回转支撑板 5.回转轴座 6.锁紧环 7.锁紧电动缸 8.电动缸基座I 9.基座齿圈 10.回转轴 11.回转臂 12.启闭电动缸 13.电动缸基座II
工作原理:启闭舱口盖具有自动启闭功能和自动锁紧功能,自动启闭功能由启闭电动缸、回转臂、回转轴、回转支撑板和球冠盖板组成的“曲柄导杆”机构实现的,通过启闭电动缸的伸缩完成球冠盖板的开启和关闭动作;自动锁紧功能由锁紧电动缸、锁紧环和基座齿圈组成的“曲柄导杆”机构实现的锁紧环旋转,进而控制锁紧环与球冠盖板相应螺旋齿面的接触与分离,从而达到密封件的压缩与恢复的目的,完成启闭舱口盖自动锁紧和解锁动作。
启闭舱口盖解锁与开启状态如图7所示,关闭与锁紧状态如图8所示。
图7 开启时状态 图8 闭合时状态
其中出入舱口的透光直径为φ450 mm,球冠形盖板顶部的半径R设计取值1 200 mm,舱口盖的材料采用00Cr25Ni7Mo4N(双相不锈钢2507),其名义屈服强度ReH为550 MPa,弹性模量E=200 GPa,工作压力为15 MPa,安全系数取1.5,计算压力Pj=22.5 MPa。按照《潜水系统与潜水器建造与入级规范》[6]第16章 潜深大于500 m的潜水器的补充规定:在初步设计阶段,封头的极限承压可按《潜水系统与潜水器建造与入级规范》中4.6.4确定。壳体厚度t具体计算过程如下:
(2)
式中:Pj为计算压力,MPa;R为盖板壳体外半径,设计取值1 200 mm;ReH为屈服强度,MPa。
考虑腐蚀余量1.5 mm和板的厚度偏差等因素,并从舱口盖的可靠运行角度出发,取一定的安全裕度,舱口盖的壳板厚度取值t=34 mm。
接下来对舱口盖盖板的稳定性进行校核,舱口盖盖板稳定性校核公式为Pcr=CSCZPe≥Pj,查《潜水系统与潜水器建造与入级规范》确定C值:
查《潜水系统与潜水器建造与入级规范》确定CS、CZ值:
盖板稳定性校核:Pcr=CSCZPe=70.95 MPa,该值大于Pj=22.5 MPa,满足稳定性校核公式。
3.3 温控系统
温控系统的功能是控制取样后装置内温度为取样深度的原位温度。温控系统制冷原理为热电制冷,利用半导体制冷片进行控温。图9为制冷单元在装置耐压壳体外的上半球部分布置图,上下半球共布置18套制冷单元(每套:TEC制冷片4片、散热翅片1个、吸热冷板1个、外壳1个、补偿器1个),每个制冷单元4个制冷片串联工作。图10为制冷单元内部结构图,外壳为导热系数较高及防腐蚀性能较好的锡青铜材质,壳体内充满22#抗磨液压油,外壳上部装配有滚动膜片式压力补偿器。制冷片冷面连接铜质吸热冷板,铜质吸热冷板与装置耐压壳体做共形设计,使整个制冷单元与装置外壳贴合;制冷片热面连接散热翅片,通过液压油、锡青铜壳体向外界海水散热。为防止制冷片冷热端通过液压油导热导致效率极低,制冷片中间充满环氧树脂,并配隔热板或PN结外涂水基陶瓷材料做隔热。深海生物保温保压装置的耐压壳体内外分布温度传感器,实时检测内外海水温度,当原位保温保压装置开始存储样品时,监控系统的PLC通过采集温度传感器记录的外界海水温度作为温控指标,通过控制不同并联制冷单元的通断来控制耐压壳体内温度。
图9 制冷单元布置图(上半球)

图10 制冷单元内部结构图
3.4 保压系统
保压系统主要由补压系统和卸压系统组成。补压系统主要用于装置采样后上浮过程中补偿耐压壳体内降低的压力。主要是因为深海生物保温保压装置采完样并随着潜水器上浮后,由于外界海水压力逐渐降低,导致耐压壳体向外扩张,导致内部压力下降。补压系统包括补压罐、高压氮气瓶、充气头、放气阀、活塞、电动调节阀等部件,如图11所示。卸压系统主要用于装置采样后继续随着潜水器下潜过程中卸掉耐压壳体收缩导致的内部增大的压力。卸压系统主要由电磁溢流阀、储水箱、手动放水阀等部件组成,如图12所示。
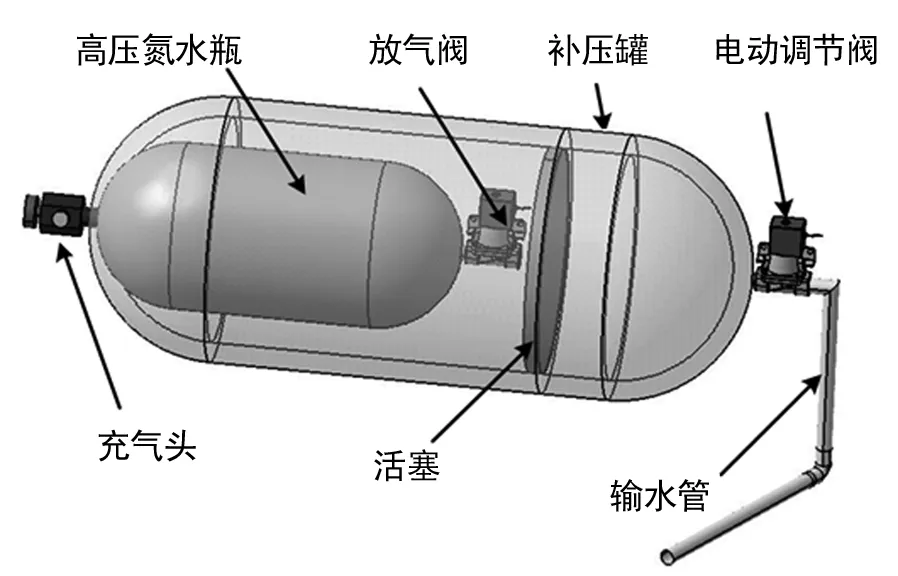
图11 补压系统
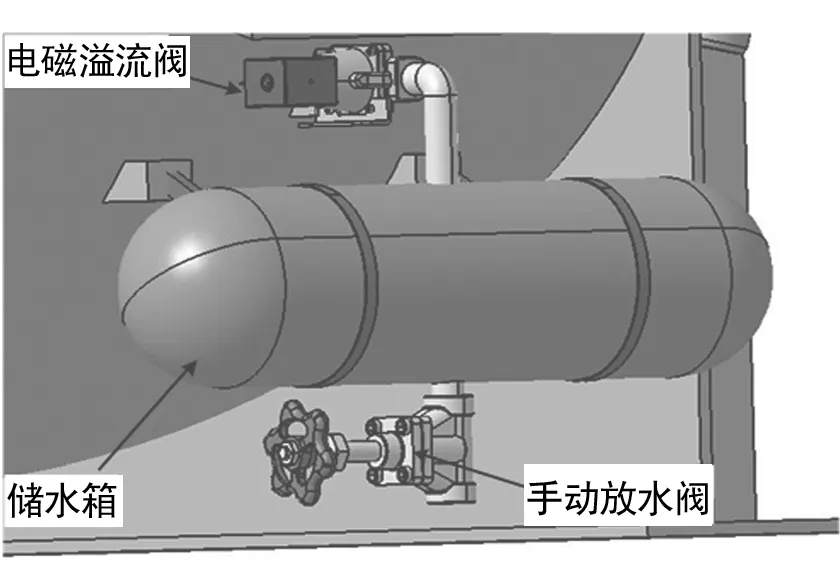
图12 卸压系统
整个保压系统工作流程如图13所示。样品放入耐压壳体后舱口盖随即关闭和锁紧,舱口盖关闭和锁紧时触发接近开关动作,整个保压系统开始进入工作状态。补压系统和卸压系统根据内置于耐压壳体内的压力传感器反馈的压力数据而适时切换工作:当潜水器采完样继续下潜时,外界水压增大压迫耐压壳收缩,耐压壳体内压力增大,超过采样点压力值,此时电磁溢流阀开启,耐压壳体内海水流入储水箱直至耐压壳体内海水压力降至采样点压力值,这个过程即是卸压系统的工作流程;当潜水器采完样上浮时,外界水压减小耐压壳膨胀,耐压壳体内压力降低,低于采样点压力值,此时电动调节阀工作,放气阀开启,高压氮气将活塞右侧的高压海水压入耐压壳体内,直至耐压壳体内的海水维持在采样点海水压力值,这个过程即是补压系统的工作流程。
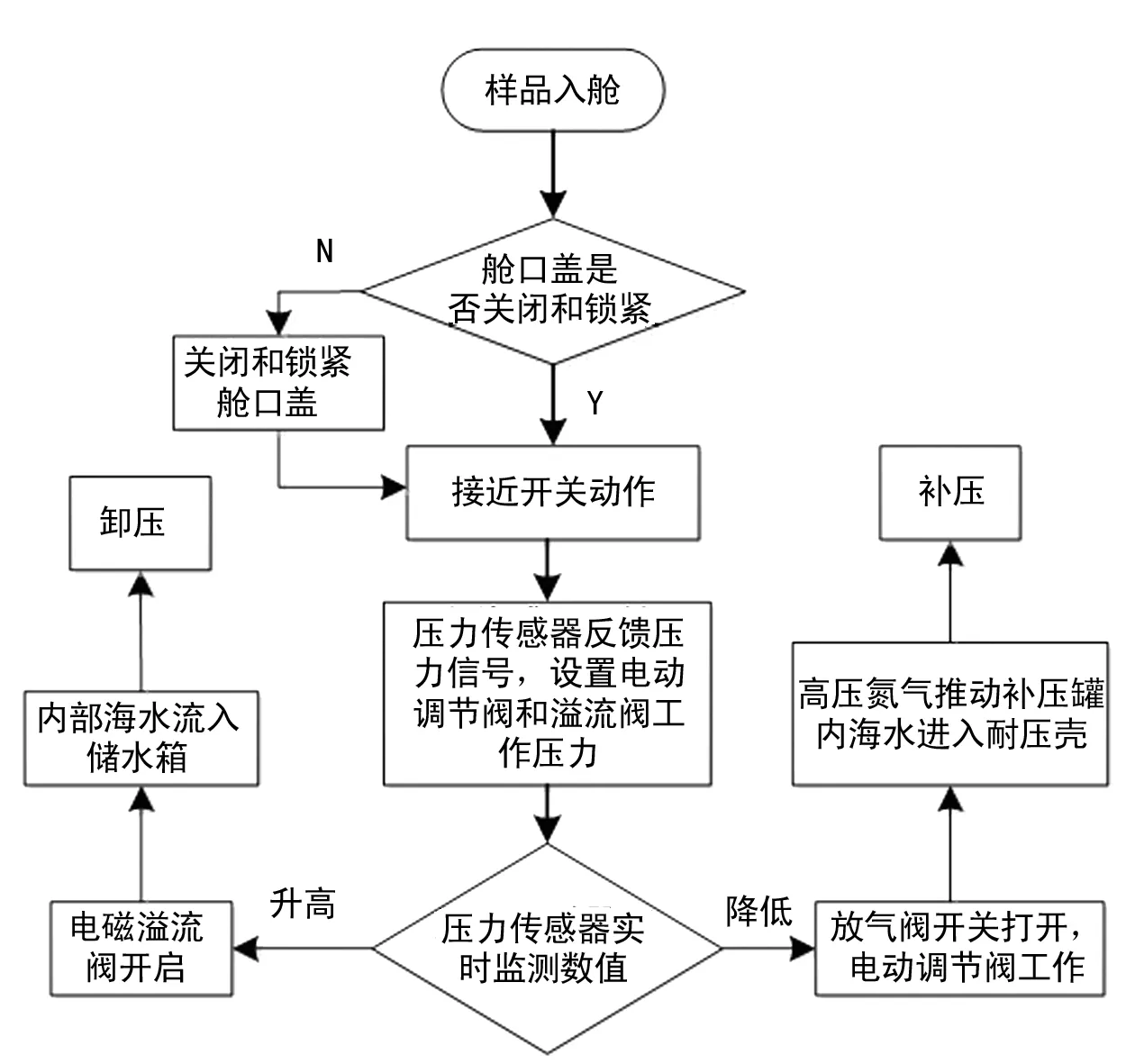
图13 保压系统工作流程图
3.5 监控系统
根据深海生物原位保温保压装置的功能需求,结合自身的设备状态,监控系统主要包含两部分:操控台和驱动电子罐。操控台放置于载人潜水器的载人舱内或者放置在ROV的工作母船上,主要包括电源变压模块、监控主机和操作面板;操控台上设有所有执行机构的动作按钮、参数显示模块以及液晶显示屏,实现深海生物原位保温保压装置的所有操作和状态参数显示;驱动电子罐与深海生物保温保压装置集成在一起,随着装置一起下潜,驱动电子罐内集成工业交换机、控制器、罐载安全传感器、视频服务器等。驱动电子罐主要根据实时检测的传感器反馈参数,完成装置的舱口盖启闭与锁紧动作控制和保温保压过程中各阀的逻辑控制,监控系统架构如图14所示。
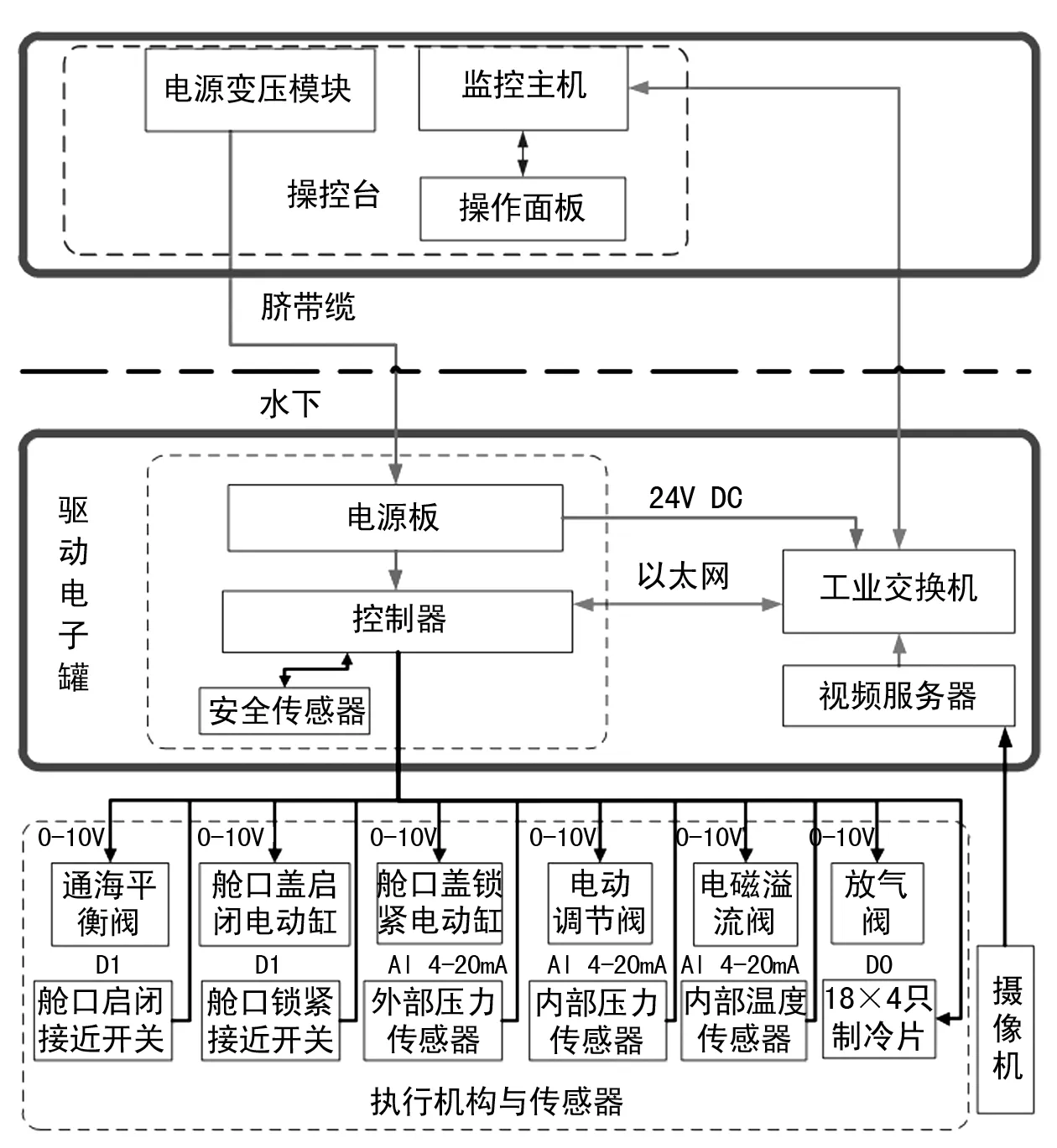
图14 监控系统结构图
监控系统的控制逻辑如下:深海生物原位保温保压装置搭载于潜水器上,在随潜水器下潜过程中连接在耐压壳体上的通海平衡阀保持开启,保持内外压平衡。至预定作业深度,监控系统根据外部压力传感器的反馈数值,控制舱口盖锁紧电动缸动作,解锁舱口盖,之后控制舱口盖启闭电动缸动作,开启舱口盖,ROV将采集的样品从原位保温保压装置的顶部放入耐压壳体内,舱口盖随即关闭和锁紧,通海平衡阀关闭。舱口盖启闭与锁紧接近开关反馈该关闭状态,并启动温控系统开始工作,将舱内样品保持在原位温度区间。上浮过程中,由于内外压力差的不断增大,舱内原位压力开始降低,压力传感器实时监测舱内压力数值,并控制保压系统启动工作,打开放气阀,高压氮气推动高压海水流入舱内完成补压过程。下潜过程中,当压力传感器检测到耐压壳内压力升高时,控制泄压系统启动工作,打开电磁溢流阀,耐压壳体内部高压海水流入储水箱完成卸压过程。
4 结 语
文中提出了一种深海生物的原位保温保压装置的设计研究方案,可通过载人潜水器或缆控潜器搭载并下潜至预定深度,进行深海生物(包括微生物样品、宏生物样品)的取样和存储,并可对采集的各类样品进行原位压力和原位温度的保持,从而保持了所采集样品的原位物理、化学及生物学特性。根据该装置的基本功能及工作模式,重点阐述了装置各系统组成和特点,完成了主要部件的计算设计以及温控系统、保压系统和监控系统工作原理介绍。文中设计的深海生物原位保温保压装置可应用于深海生物及深海海底矿物质的保真取样,所研究内容对于提升深海生物原位研究以及深水作业能力拓展均具有重要的意义。
