基于时域的多新息随机梯度法VSG参数辨识*
2022-05-20曲玉博刘鹏辉郭向伟杜少通
朱 军 曲玉博 刘鹏辉 郭向伟 杜少通 杨 明
(河南理工大学电气工程与自动化学院 焦作 454000)
1 引言
随着能源危机和环境问题愈发严重,人们开始大力开发利用环境友好型的清洁能源,风力发电、太阳能发电等新能源迅速发展。这些分布式电源通过并网逆变器接入电力系统,而传统并网逆变器不能像同步发电机那样为电网提供惯性和阻尼支撑,不能参与电网的调频调压过程,这给电网的稳定运行带来了巨大的影响。随着大量的分布式电源通过并网逆变器接入电网,电网电力电子化程度越来越高,此问题愈发严重。虚拟同步发电机技术(Virtual synchronous generator,VSG)能够使逆变器具有像同步发电机一样的惯性和阻尼,它的出现为分布式电源友好并网提供了新思路。VSG的概念最早由国外机构联合提出,随后国内外学者相继提出了电流源型及电压源型的VSG控制方案[1-2]。目前,已有不少学者对VSG技术进行了深入研究。
控制技术方面,文献[3]系统性地综述了VSG的基本原理、关键技术、应用及发展趋势等。文献[4]总结了模拟惯量和阻尼的各种控制技术,从直流微网和交流微网两个方面梳理了惯量和阻尼技术的研究现状。文献[5]在分析功率耦合的基础上,提出虚拟稳态同步负阻抗的功率解耦策略,通过直接计算得到参考电流,改善了系统性能。文献[6]建立了多VSG并联系统的小信号模型,分析了控制参数对VSG及电网的影响。在应用方面,文献[7]将VSG技术应用到电动汽车充电桩中,对电动汽车变流器采用转动惯量自适应控制,使电动汽车能够参与电网的调频调压。文献[8]提出基于有功备用的光伏虚拟同步发电机控制策略,使光伏电源直接通过VSG控制为系统提供惯量,且不需要增设储能系统即可实现光伏逆变器的调频调压功能。文献[9]对双馈风机的变流器采用改进的VSG控制,使风机能够根据电网的频率与电压波动调节输出功率,响应电网的调频调压服务。文献[10]对采用VSG控制的双馈风机的暂态功角进行了研究成果的梳理总结,并对后续研究方向提供了思路。
除上述针对VSG的优化控制策略方面之外,在VSG参数辨识方面也有诸多研究。文献[11]利用双线性变换法将VSG模型离散化后采用最小二乘法对VSG参数进行了辨识,并分析了辨识结果的误差。文献[12]采用最小二乘曲线拟合的方法结合甩负荷试验辨识出VSG的惯性和阻尼。文献[13]将VSG系统在工作点附近进行线性化得到系统的二阶线性化模型,然后采用最小二乘法辨识出了VSG的阻尼和惯量。
然而,以上这些VSG参数辨识方法大多需要将系统模型化为离散时间模型后进行辨识。为避免连续系统离散化导致VSG系统的信息缺失,而给参数辨识带来额外误差,本文结合传递函数模型的参数辨识方法[14],提出基于连续时域的多新息随机梯度法的VSG控制关键参数辨识。
2 VSG基本原理
虚拟同步发电机技术的本质是将同步发电机的数学模型引入到逆变器的控制算法中,使得逆变器也具有惯性和阻尼,参与到电网的调频调压中。并网逆变器采用VSG控制时的拓扑及控制结构如图1所示。
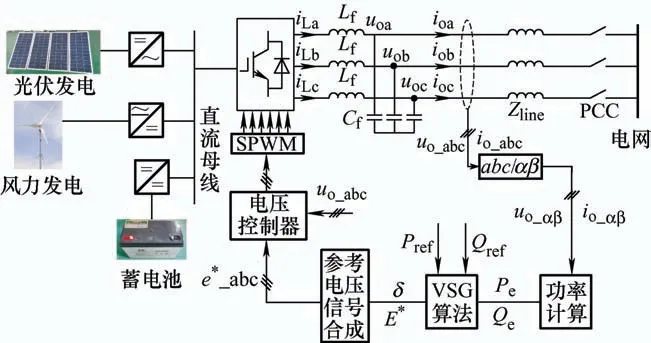
图1 VSG拓扑图
图1中,直流侧光伏发电、风力发电、储能系统等新能源发电可以等效为直流电源;Lf为滤波电感;Cf为滤波电容;iLa,b,c和ioa,b,c分别为滤波电感电流和逆变器输出电流;uoa,b,c为逆变器输出电压;Pe和Qe分别为逆变器实际输出有功功率和无功功率。
VSG的功率控制模块包括有功-频率控制和无功-电压控制两部分,本文只考虑有功控制部分。功频控制部分由虚拟调速器和转子运动方程组成。由于VSG控制算法中调速器与转动惯量的模拟方式不同,会产生不同的VSG控制模型,如转子运动方程中的阻尼转矩采用D(ω−ωg)[15]或D(ω−ω0)[16],分别起到动态阻尼作用与动稳态阻尼作用;调速器采用Kω(ω−ωg)或Kω(ω−ω0)形式。根据参考角频率与反馈角频率选取不同,得出的VSG控制模型也不同,为了使VSG参数辨识具有普遍性,需要采用统一的VSG控制模型

式中,Pref、Pm、Pe分别为指令功率、机械功率、电磁功率;ω、ω0、ωg分别为VSG输出角频率、系统额定角频率、电网角频率;K1为动态有功下垂系数;K2为动稳态有功下垂系数;J为转动惯量;D1为动态阻尼系数;D2为动稳态阻尼系数。
从图1可求出VSG输出的有功功率为

式中,E为逆变器出口电压;U为电网电压;Z为系统总阻抗;SE为VSG功角与有功功率的增益;δ为VSG功角。
辨识环节需要给系统一个扰动以激励出系统的动态变化信息从而进行参数辨识。为便于分析,本文选择给指令功率一个阶跃扰动,并将大电网视为理想状态,即电网频率为额定频率,此时,动态阻尼系数D1和动态下垂系数K1不起作用,阻尼系数D1、D2合并为D2,下垂系数K1、K2合并为K2。实际测量环节中,可将逆变器外接三相电压源实现。
将式(1)、(2)线性化可得VSG控制的功频部分小信号模型如图2所示。
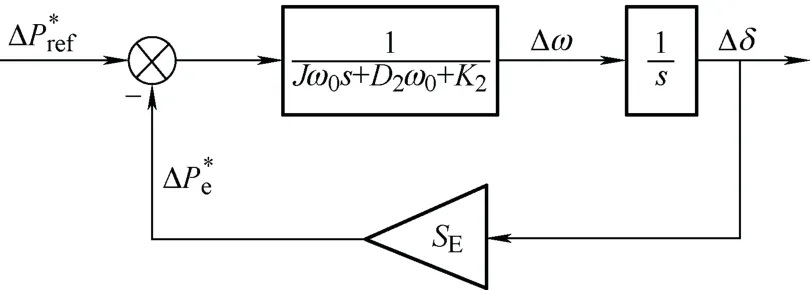
图2 VSG功频控制小信号模型
由此得VSG控制模型二阶传递函数为

式中,D=D2ω0+K2,即VSG输出的总等效阻尼系数。将式(3)化简为

式中

3 VSG参数辨识
3.1 参数辨识
参数辨识就是在已知系统模型的情况下,对系统施加某种激励后,通过收集系统实测到的输出数据再结合输入数据,求取模型中的特定参数。目前针对VSG的参数辨识,大多使用最小二乘法,通过使用离散阶跃响应函数描述待辨识系统。在对VSG控制系统模型离散化时会损失部分信息,可能会导致辨识精度下降。本文从VSG系统的传递函数模型出发,直接辨识连续时间模型下VSG的关键参数。
参数辨识的激励通常用脉冲激励或阶跃激励,本文采用阶跃激励的方式进行参数辨识,通过给系统功率指令施加阶跃扰动,激励出功率振荡时的相关数据并收集,然后根据系统模型参数之间的关系,用辨识算法估计出系统参数。考虑幅值为A的阶跃扰动信号,则系统的阶跃响应为准则函数是用来衡量模型接近实际模型的准则,是辨识中必不可少的要素,在这里定义VSG参数辨识的准则函数J(θ)为

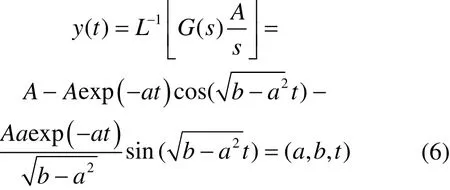
式中,θ=[a,b]T,为待辨识参数向量;y(t)为变器实际输出功率;f(θ,t)为辨识模型估计输出功率。
VSG参数辨识的过程要使准则函数达到最小,此时的参数估计值即为所求。极小化准则函数的过程属于参数优化的问题,参数优化的方法有很多,如梯度下降法、牛顿法、坐标下降法等。本文采用基于梯度搜索原理的多新息随机梯度法(Multi-innovation stochastic gradient method,MI-SG)来进行VSG参数辨识。随机梯度法是通过计算准则函数的一阶导数得到搜索方向,简单易实现,而多新息理论则充分地利用系统的动态信息,提高数据利用率,保证辨识的精度。
3.2 MI-SG法VSG关键参数辨识
令准则函数J(θ)中,t=kh,其中h为采样周期。求准则函数J(θ)关于θ的一阶导数,得到准则函数的梯度为

则由负梯度搜索原理得随机梯度法参数估计


则利用MI-SG法进行VSG关键参数辨识的流程如图3所示。

图3 辨识流程图
其辨识步骤如下所示。
(1) 确定新息长度p;令k=0,设置递推步数L;令参数估计初值θˆ(0)为任意向量。
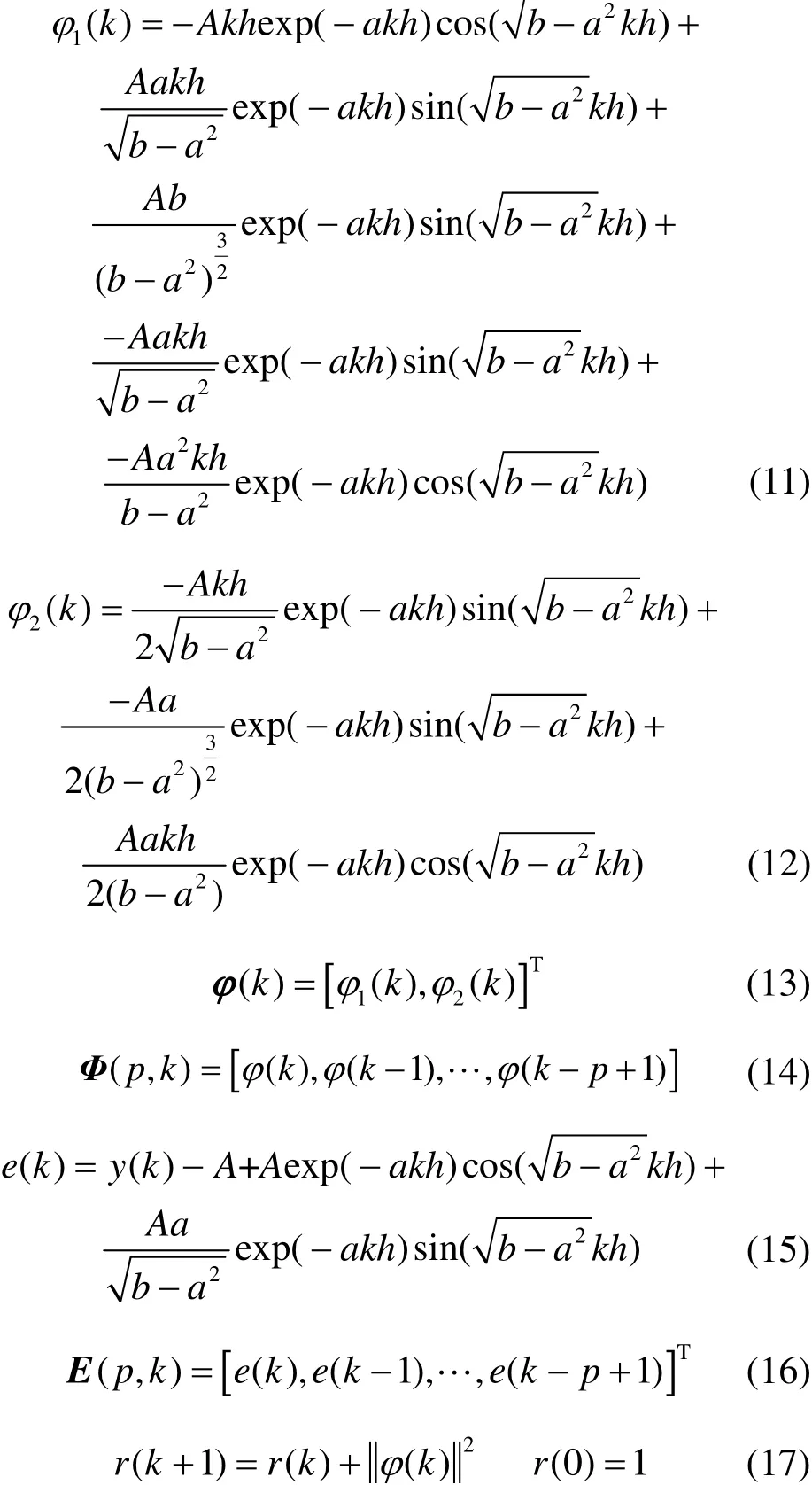
(2) 收集输出功率观测数据(k,y(k));利用式(11)~(14)计算信息矩阵Ф(p,k)。
(3) 利用式(15)~(16)计算新息向量E(p,k)。
(4) 利用式(17)计算参数r(k+1)。
(5) 利用式(10)更新参数估计θˆ(k+1);如果k=L,递推停止。否则,令k=k+1,返回步骤(2)。
由此得到参数a、b后,代入式(5)即可求出VSG实际输出的惯性和阻尼系数
3.3 辨识误差分析
由于将VSG控制的功频控制模型进行了线性化处理,在施加功率扰动后,系统的稳态工作点发生偏移,会给辨识带来误差,如图4所示。
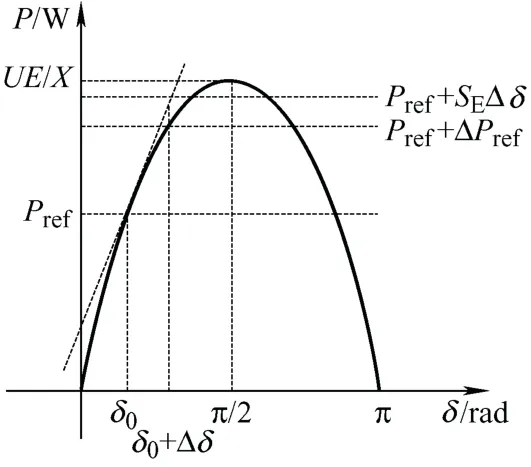
图4 功率扰动偏差
设(E0,δ0)为(Pref,Qref)决定的平衡点,为了确保参数辨识的可靠有效,本文设定扰动后的线性化模型与非线性化模型偏差不超过5%,以功率来衡量系统误差,即

由此可求得指令功率允许的扰动大小

指令功率满足式(20)要求后,线性化模型与原模型的误差能够控制在一定精度范围内,能够保证系统增益不变,为参数辨识提供可靠有效的数据。当额定电压为311 V,解得式(20)为5 543≤∆Pref≤11 390,因此本文指令功率扰动取10 kW。
4 仿真验证
4.1 MI-SG法VSG参数辨识仿真验证
为了验证所提出的VSG虚拟惯性和阻尼系数辨识方法的真实有效性,搭建如图1所示VSG系统的仿真模型,仿真主要参数设置见表1。

表1 仿真参数设置
由第2节可知,待辨识VSG系统的模型可化为式(4)。利用阶跃激励试验进行辨识,收集逆变器试验观测输入输出功率数据。考虑到系统可能存在扰动及噪声等,导致收集到的数据波形无法利用,因此采用等效滤波法对输入输出数据同时进行滤波,不影响原VSG控制模型精确度[17]。逆变器输出功率滤波前后波形图如图5所示,对比图5a、5b可以看出,滤波前的功率波形图波纹过大,无法用于参数辨识,采用等效滤波处理后图形变得平滑,且滤波前后动态过程一致,系统模型没有改变。
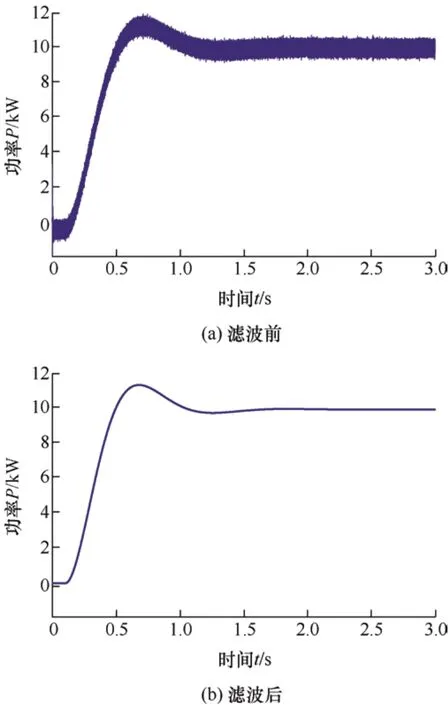
图5 输出功率滤波对比图
为验证辨识方法的有效性,按照第3.2节所述辨识步骤进行验证。VSG的虚拟惯性J设置为20,总等效阻尼系数D设置为142.32×100π,在0.1 s时施加10 kW的指令功率阶跃激励,系统的输入输出数据采样间隔为2×10−6s,仿真时长为3 s。收集输入输出功率数据,然后按照第3.2节所述辨识方法进行参数估计,设置新息长度为2,得到辨识模型为

将a、b的值代入式(18),计算得到VSG实际输出的惯性J*和等效阻尼D*估计值分别为21.55、139.47×100π,辨识误差较小,分别为7.7%、2.1%。系统输出单相电压、单相电流及辨识中参数变化过程如图6所示。
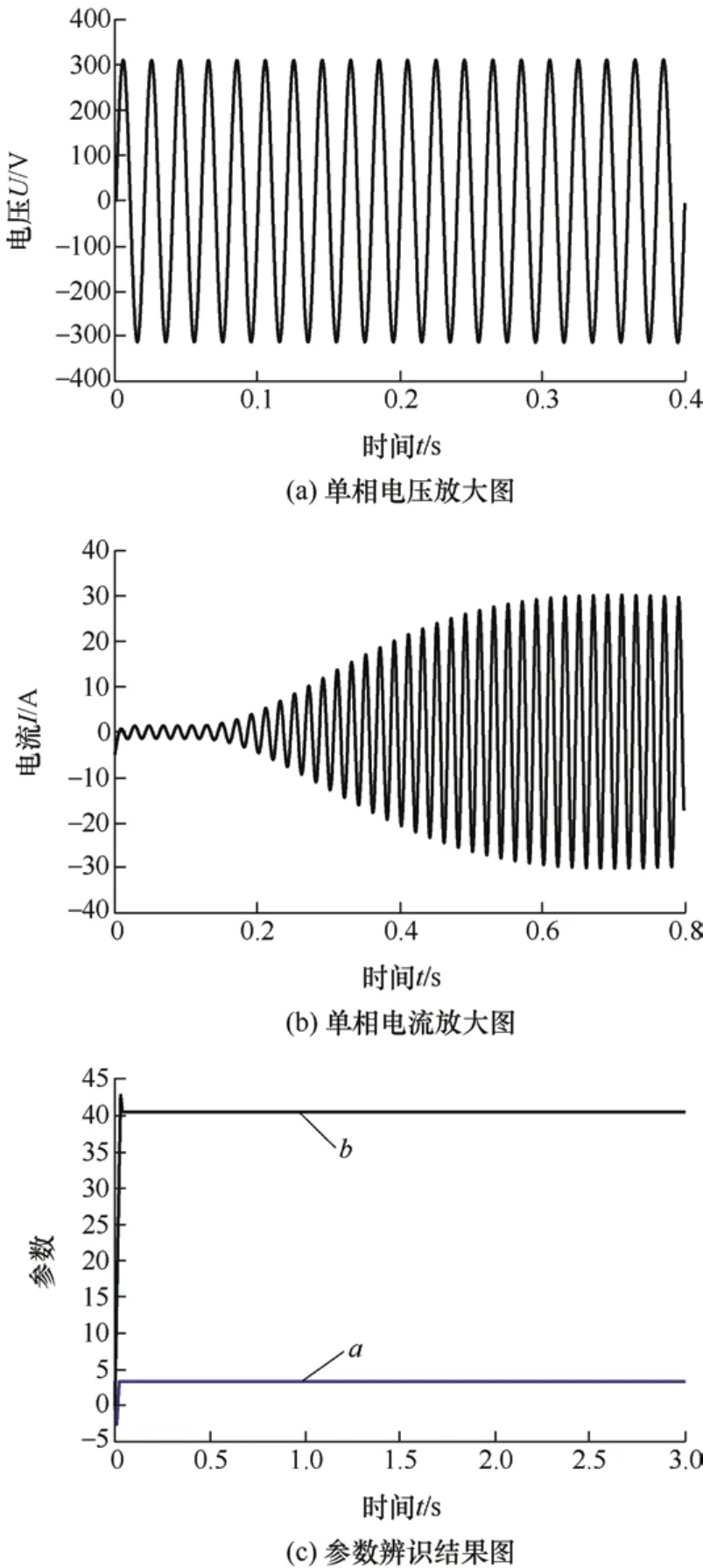
图6 辨识结果图
由图6c可知,参数a、b可在较短时间内达到稳定值。为确定新息长度对VSG关键参数辨识结果的影响,分别取新息长度p为2、3、5,然后重复上述辨识步骤,得到辨识结果如表2所示。
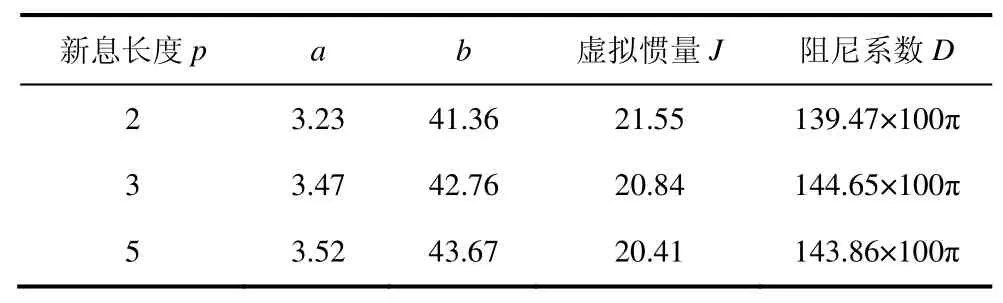
表2 辨识结果对比
由表2可知,新息长度p选取5时较之p选取2、3时参数辨识的精度高。适当增加新息长度有利于提高参数辨识的精度,但同时会带来算法运算量过大的问题,故新息长度的选取需要根据实际情况综合考虑,本文选取p为5。
为验证VSG参数辨识的结果准确性,对VSG控制系统实际模型和辨识的估计模型进行阶跃试验对比,对比结果如图7所示,其中三条曲线分别是实际输出模型、新息长度分别为2和5时辨识出的估计模型。从图7可以看出,辨识出的估计模型与实际模型相差不大,能够保证辨识精度。

图7 实际输出与辨识模型对比图
4.2 对比验证分析
基于最小二乘法的VSG参数辨识是将VSG模型的传递函数进行离散化处理后再进行辨识,以后向差分法为例,得到差分方程如式(22)所示

式中,T为采样周期。
为了便于对比分析,系统同样在0.1 s时施加10 kW指令功率阶跃扰动,采样间隔设置为2×10−6s。通过递推最小二乘法辨识后,得到VSG传递函数模型如式(23)所示

计算得到系统等效转动惯量J为21.34,等效阻尼系数D为139.75×100π。MI-SG与递推最小二乘法的VSG参数辨识结果见表3,辨识模型的输出功率对比图如图8所示。
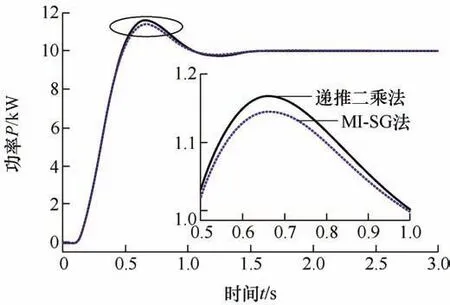
图8 辨识模型对比图
由表3及图8可以看出对于统一模型的VSG参数辨识,MI-SG(p=5)法具有更小的辨识误差。经过以上仿真验证和分析可得如下结论。
(1) 随着递推次数的增加,J、D的辨识误差不断减小,且迅速达到稳定值。
(2) MI-SG法中新息长度p的增加有利于减小辨识误差,但由于计算量过大的原因,并不能无限制地增加新息长度。
(3) 相较于将VSG模型离散化后进行辨识的最小二乘法,MI-SG法具有更小的辨识误差,辨识精度更高。
(4) 通过实际模型与估计模型的响应曲线对比可知,MI-SG法辨识模型能够准确地描述VSG的动态与稳态响应过程,参数辨识精度较高,等效惯量和阻尼的辨识误差分别为2.1%和1.1%。
5 结论
为量化采用VSG控制的逆变器提供给电网的阻尼和惯性支撑能力,本文以不同的VSG控制模型为基础,建立了统一的VSG控制模型,然后推导了多新息随机梯度法进行VSG关键参数辨识,定量辨识出逆变器输出的等效阻尼和惯性,同时也可作为商用VSG控制逆变器的检验手段,得到结论如下所示。
(1) 通过对比分析不同的VSG模型,归纳出一种能涵盖VSG动、静态调节性能的统一模型,并基于VSG指令功率扰动,得到VSG二阶传递函数。
(2) 通过机理分析将VSG参数辨识转化为参数优化问题,采用多新息理论的随机梯度的时域辨识方法,避免了模型离散化过程中的数据丢失,直接辨识出VSG的关键参数,量化VSG对电网的支撑能力。
(3) 由于文章所采用的扰动是基于指令功率扰动,下一步将考虑如何在电网频率扰动情况下进行参数辨识。
