柔性多状态开关的改进协调控制策略*
2022-05-20周飞杨王楚扬林金娇孔祥平郑俊超
周飞杨 王楚扬 张 犁 林金娇 孔祥平 郑俊超
(1. 河海大学能源电气学院 南京 211100;2. 国网江苏省电力有限公司电力科学研究院 南京 211100)
1 引言
在“双碳”和“双高”的大背景下,分布式新能源在配电网中的渗透率不断提高。但是,高比例新能源的接入也给配电网带来了潮流倒送和电压越限等问题[1-2]。为了解决这些问题,配电网通过网络重构,改变线路中联络开关的开合状态,进行功率的合理分布。然而传统联络开关灵活性较差、响应速度较慢,难以实现实时准确的潮流控制[3]。因此,英国帝国理工学院的研究学者用柔性多状态开关(Soft open point,SOP)来取代传统配电网中的联络开关[4]。SOP具有潮流调节灵活和响应快速等优点,可有效促进新能源的协同消纳,提高配电网电能质量[5-6]。在各类SOP拓扑中,模块化多电平换流器(Modular multilevel converter,MMC)具有输出波形质量高、可扩展性好、开关损耗低等优点[7-9],在中压配电网中有较好的应用前景,因此本文以基于MMC的SOP为研究对象。
SOP中各换流器的功率协调控制对系统的稳定运行至关重要。协调控制的主要目标有以下2点:① 直流电压不能越限;② 受扰后功率快速平衡[10]。主从和下垂是两种典型的协调控制[11-12],主从控制可准确控制各换流器功率,直流电压稳定性好,但依赖于各换流器间的通信[13]。下垂控制不依赖通信,但直流电压工作点不固定,无法精准调控各换流器功率[14]。因此,考虑到SOP中部分换流器需要定功率输出,且各换流器间的线路较短,本文针对主从控制展开研究。
传统的主从控制中主控换流器采用定直流电压控制模式,其余从控换流器采用定功率控制模式;在系统出现功率波动时,依赖主控换流器调控系统功率平衡,存在直流电压越限和交流功率超调的隐患。文献[15]利用模型预测控制替代传统比例-积分(Proportional-integral,PI)控制,使SOP具有较好的抗干扰能力和动态恢复能力,但是该方法存在计算量大和谐波分布广的问题。文献[16]在文献[15]的基础上,提出了反馈线性化滑模控制策略,在保证SOP协调运行的同时减少计算量和谐波分布,但上述协调控制主要针对系统小功率波动。文献[17]采用干扰观测值前馈的方案抑制系统干扰对直流电压的影响,但是其电压外环的比例积分系数选取困难。文献[18]利用稳态逆模型生成的电流预估值修正内环电流参考值,使SOP能在大功率波动时减少功率超调量,降低电压过冲值。但该方法增加了计算量,且未考虑小功率波动时的稳态性能。文献[19]采用控制器状态跟踪控制方法,实现三端SOP并离网时的协调控制,但是其控制器结构复杂且小功率波动时依旧存在主换流器功率超调问题。
本文针对这一问题,以三端SOP为例,提出了一种柔性多状态开关的改进协调控制策略,兼顾大小功率波动和稳定性。本文首先给出了SOP的拓扑结构和控制策略;然后分析了功率波动时直流电压与功率的内在关系,在此基础上得到了直流电压跟随系数,使控制器可以根据直流电压的变化实时调整功率参考值,使多个换流器在功率波动时同时参与功率调节,进而实现功率协调控制的目标。最后,搭建了三端SOP仿真模型,在不同工况下对所提策略的正确性和有效性进行了验证。
2 SOP的拓扑结构和数学模型
2.1 SOP的拓扑结构
SOP是由两个及以上的MMC通过公共直流线路连接而成的。与两端SOP相比,三端SOP减少了网络能量损失,并使配电网络能够承载更多的分布式能源[20]。本文采用的三端SOP拓扑结构如图1所示。SOP的各端换流器结构一致,同时各换流器采用的三相MMC换流器的每相具有对称结构。单相MMC的拓扑结构如图2所示。MMC的每个相单元由上下桥臂组成,每个桥臂又由桥臂电抗器L和n个级联子模块组成。
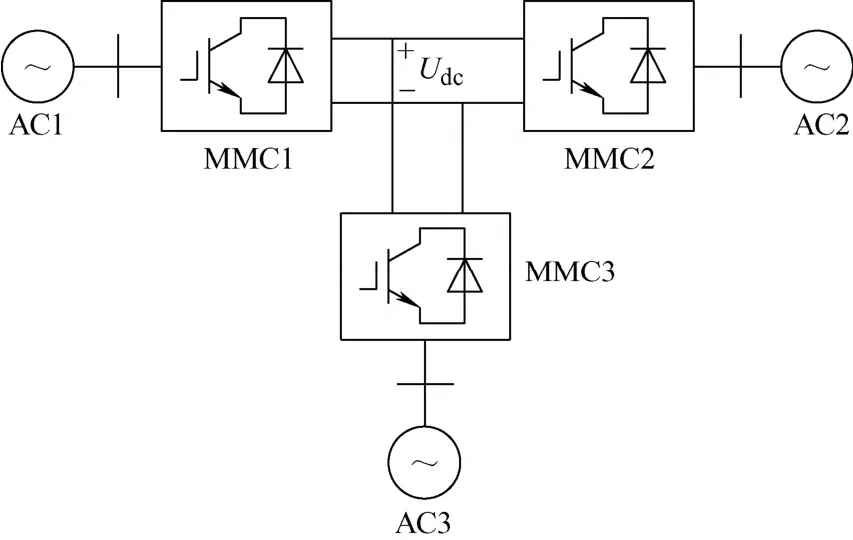
图1 三端SOP的拓扑结构

图2 MMC第k相单元结构图
2.2 SOP的数学模型
假设三相电网电压平衡,根据图2建立单相MMC的数学模型。其中usk和isk分别表示网侧交流电压和电流(相数k=a、b、c);ik和uk分别表示MMC交流侧的相电流和相电压;Lg和Rg分别为交流侧的连接电感和等效电阻;L为桥臂电感;upk和unk分别为上下桥臂电压;ipk和ink分别为上下桥臂电流;Udc是直流电压。
定义第k相上下桥臂的环流为izk,其与上下臂电流ipk和ink的关系可表示为

对MMC电路采用KVL方程描述,即

式中,ek是MMC内部的虚拟电动势。式(2)表明通过控制虚拟电动势和交流电流可以间接控制MMC的交流电压,通过控制环流可以间接控制MMC的直流电压。因此设置交流电流参考值和环流的参考值作为内环电流参考值。
2.3 三端SOP的基本控制策略
2.3.1 电流内环控制
基于第2.2节的分析,单相MMC直接控制策略中存在两个并行的电流环:交流电流环与环流环。两个环路的输入信号分别是交流侧电流Is和环流Iz。其内环控制结构如图3所示。
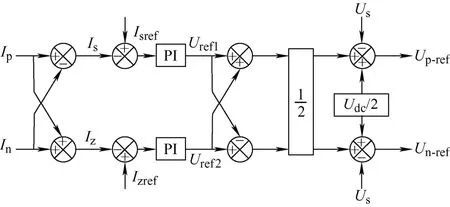
图3 电流内环控制结构图
图3中,Up-ref和Un-ref分别为上下桥臂电压的参考值;Isref为交流电流参考值,Izref为环流参考值,具体值由外环控制器生成。将环流参考设置为直流量,这样环流环可以抑制环流中的交流分量,减少MMC装置中的无功波动和功率损耗。
2.3.2 定功率控制
SOP可以实现端口间的潮流控制,功率控制外环根据换流器输出有功功率参考值Pref和无功功率参考值Qref确定当前内环交流电流和环流参考值。控制框图如图4所示。

图4 定功率控制结构图


则定功率控制下交流电流及环流电流基准为
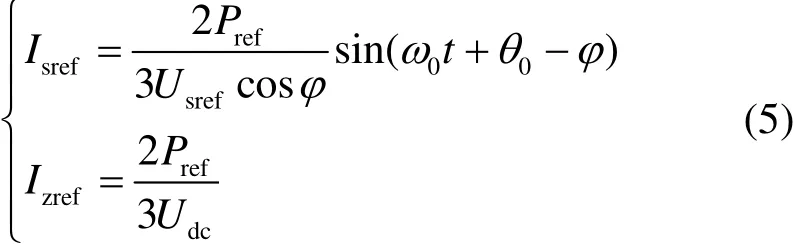
式中,Usref和Isref分别为网侧交流电压和交流电流参考值;θ0为交流电网电压初相角;φ为功率因数角。
2.3.3 定交流电压控制
当SOP端口的交流馈线发生三相短路故障时,端口换流器应切换成定交流电压控制模式,继续为非故障区的重要负载提供交流电压支撑。其控制结构图如图5所示。其中P为采样得到的MMC的实际功率输出。定交流电压控制可以通过设置交流侧电压外环产生内环电流参考值。外环调节器的表达式为

图5 定交流电压控制结构图

式中,Usvf是网侧交流电压幅值;Usref和Isref分别是网侧交流电压和交流电流的参考值。
3 SOP的改进协调控制策略
主从控制的SOP系统在出现不平衡功率时,需要由主换流器进行功率平衡,而其余从换流器保持定功率运行。当系统发出的有功功率大于吸收的有功功率时,直流电压上升,主换流器减少输出功率。当系统发出的有功功率小于吸收的有功功率时,直流电压降低,主换流器增大功率输出。如果输入功率降低或增加太多时,主换流器在参与功率调整时会有功率超调的问题,同时直流电压会有越限的可能。因此,选取一个从控换流器,将其定功率参考值改为跟随直流电压变化的变功率参考值,即可在直流电压变化时参与功率调节,实现直流稳压和功率平衡的目的。MMC直流侧电压跟随系数可表示为

式中,ki为第i个换流器的直流电压跟随系数;Pi、Pimax分别为换流器的有功功率实际值和额定有功容量;Udcref、Udcmax分别为直流电压的参考值与最大值(通常为1.05Udcref)。
此外,改进后的定功率参考值可以定义为

式中,Piref、P'iref分别为换流器有功功率参考值和新的参考值。
从式(7)可知,换流器的额定有功容量Pimax越大,ki越大即可调功率裕度越大,在直流电压变化时参与功率调节的能力越强,从而更有效地减轻主换流器的功率调节负担。
因此定义换流器的可调功率为额定有功容量与实际有功输出之差,并选取可调功率较大的从换流器采用改进定功率控制,选择条件如式(9)所示

式中,j为改进定功率控制的换流器编号。
同时,式(8)表明系统正常工作时,直流电压稳定,功率指令值不受影响,即改进后的控制结构不会对系统造成影响,且控制结构简单。
本文选取最大可调容量的MMC作为主控端,可调容量较大的MMC采用改进定功率控制。对于从换流器全是定功率控制的系统,只有主换流器参与功率调节,直流电压可能越限,主换流器功率可能过载。在本文提出的改进定功率控制下,有从换流器同时参与不平衡功率的调整,系统动态响应快,直流侧电压不会越限,主换流器功率不会过载。
综上所述,改进定功率控制的总体控制框图如图6所示。

图6 改进定功率控制结构图
4 仿真结果分析
为了验证所提出改进协调控制策略的有效性,基于PLECS仿真软件搭建如图1所示的三端SOP仿真模型。其中MMC1作为主控换流器,采用定直流电压控制;MMC2采用改进定功率控制;MMC3采用定功率控制。考虑本文研究的SOP主要应用于中压配电网,系统仿真参数如表1所示。
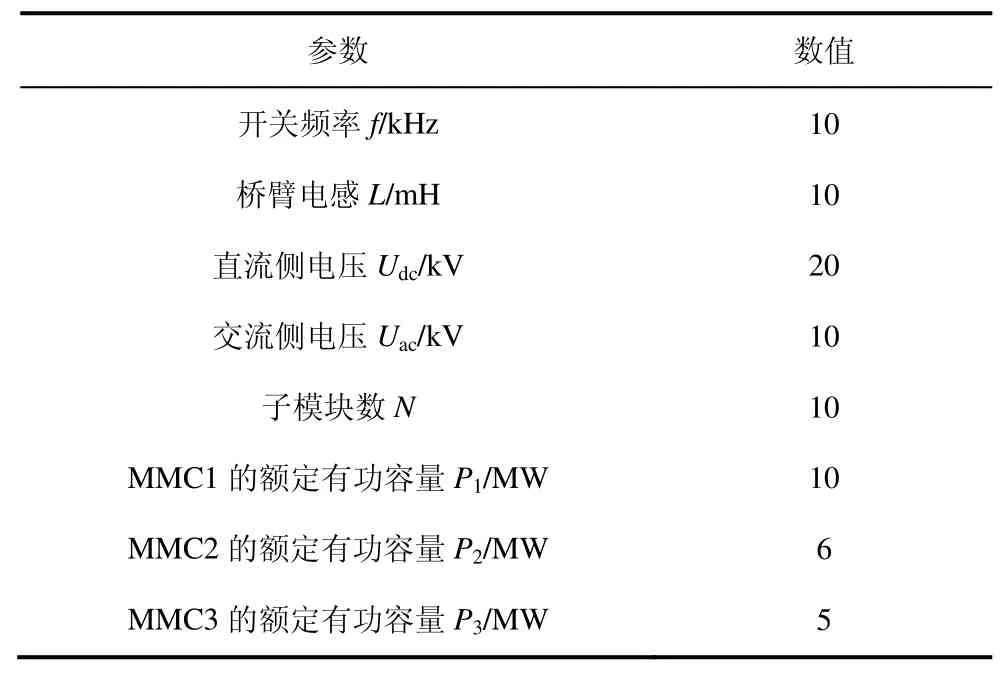
表1 仿真参数
4.1 案例1
初始时刻,MMC2和MMC3的有功功率参考值分别设置为−4 MW和−2 MW,MMC1输出的有功功率为6 MW。系统传输功率平衡,直流电压稳定。MMC3的有功功率指令值在0.15 s时变为−4 MW,MMC2的有功功率指令值在0.3 s时变为−2 MW。直流电压的上限和下限分别为21 kV和19 kV。
在0.15 s时,MMC3的功率参考值由−2 MW变为−4 MW,系统送出的有功功率小于吸收的有功功率,直流电压下降。从图7a和7b可以看出,定功率控制的MMC2在0.15 s时的功率输出没有受到影响;MMC1参与功率调节时,最高输出功率达到9 MW,存在功率越限的潜在威胁;直流电压暂态波动值为18.875 kV,电压低于下限,直流电压暂态调整时间为0.02 s。从图8可以看出,在改进定功率控制方法下,MMC1在功率突变的瞬态过程中无超调量;MMC2根据自身功率裕度参与功率调节,不发生过载;直流电压波动值为19.551 kV,在允许波动范围内,直流侧电压瞬态调整时间为0.01 s,调整速度更快。

图7 定功率控制(小功率波动)
在0.3 s时,MMC2的功率参考值由−4 MW变为−2 MW,系统送出的有功功率大于系统吸收的有功功率,直流电压升高,直流系统有不平衡功率为2 MW,由MMC1进行功率调节。在图7中,MMC1在平衡功率时有过冲现象;直流电压暂态波动值为21.125 kV,直流电压高于最大工作电压,恢复时间为0.02 s。在图8中,MMC1没有发生功率超调;MMC2平滑切换并稳定在新的功率指令值;直流电压升至20.585 kV,在允许运行范围内,直流调压时间0.012 s。

图8 改进定功率控制(小功率波动)
在采用改进控制方法的系统中,当定功率控制换流器的功率参考值发生跃变,改进定功率控制的换流器和定直流电压控制的换流器参与系统功率和直流电压的稳定调节,且系统的动态响应更快;当用于改进定功率控制的换流器功率参考值发生变化时,换流器自身平滑切换到新的指令值,以获得良好的直流电压质量。
4.2 案例2
初始时刻,系统运行稳定,MMC2和MMC3的有功功率参考值均为−3 MW,MMC1的有功功率输出为−6 MW,系统功率平衡,直流电压稳定。MMC3交流侧的重要负载为1.5 MW。由于从站数量较多,故障概率较大。因此本文讨论MMC3交流侧0.2 s发生三相短路故障,0.205 s检测到故障并切换到定交流电压控制继续为重要负载供电。
当MMC3交流侧馈线在0.2 s发生三相短路故障时,交流侧电压降为0,导致交流侧有功功率降为0。因为在MMC3内部有大量的储能电容,它可以继续接收直流侧送来的有功功率。因此,MMC1发出的有功功率不会突然下降。0.205 s时,MMC3切换到定交流电压控制,继续为重要负载供电。图9中,从控端均采用定功率控制时,控制方式切换瞬间直流电压跃升至21.522 kV,超过最大工作电压,电压暂态波动时间为0.012 s;MMC1有功率过冲现象。图10中,MMC2采用改进定功率控制,控制模式切换时直流电压为20.525 kV,电压暂态波动时间为0.008 s,系统运行在合理的电压波动范围内。

图9 定功率控制(大功率波动)

图10 改进定功率控制(大功率波动)
相比之下,采用改进定功率控制的SOP具有电压冲击小、瞬态过渡时间短、控制模式切换时功率平滑过渡等优点。可以看出,本文提出的策略可以实现了大功率波动时SOP的快速功率平衡和直流电压稳定。
5 结论
本文针对传统主从控制在功率波动时仅主控端参与功率调节,导致的功率过冲和直流电压越限问题,提出了一种控制结构简单的SOP改进协调控制策略。理论分析和仿真结果表明,本文所提策略能灵活应对以下工况。
(1) 为应对新能源接入带来的功率波动问题,设置可调功率较大的换流器为改进定功率控制,与主控换流器一起进行功率调节,从而保证系统的稳定性。
(2) 当系统出现小功率波动时,该策略可减小稳态直流电压偏差,缩短系统的暂态响应时间。
(3) 在系统出现大功率波动,如交流馈线三相短路,SOP需要控制模式切换时,该策略可以保证控制模式的平滑切换,且切换过程直流电压不越限。