交直流混合微电网并联双向互联变换器环流抑制与功率控制*
2022-05-20向文凯
郭 强 向文凯 李 山
(重庆理工大学重庆市能源互联网工程技术研究中心 重庆 400054)
1 引言
交直流混合微电网能够以更高的效率和更好的兼容性,有效地解决各种交直流负载、分布式电源和分布式存储的集成问题[1-2]。从结构上看交直流母线将系统分为三个部分,分别是交流子微网,直流子微网和双向互联变流器(Bidirectional interlinking converter,BIC)。在全球范围内,已有多个交直流混合微电网项目得到了验证,其中包括荷兰Bronsbergen假日公园[3]、欧洲超级电网[4]等。在交直流混合微电网中,BIC作为连接交流和直流母线的纽带,主要实现交、直流侧微电网间功率双向流动[5]。随着分布式电源数量以及负荷的不断增加,要求BIC将具有更高的功率处理能力。由于单个BIC功率受限,常采用多并联BIC结构以满足微电网不断扩容的需求[6]。
在交直流混合微电网能源管理方面,特别是在孤岛系统中,研究人员已做了大量研究[7-8]。其中,常采用下垂控制策略调节交直流微电网中各分布式电源的功率分配[9-11],但该策略无法用于多并联BIC之间的功率分配;文献[12]提出一种分布式自适应修正的下垂控制策略,然而该方法需要在通信中传输50 Hz范围的交流电流信息,同样不适合于BIC结构。文献[13]中下垂控制被分配到系统的变换器中,以实现对直流子微网电压调节,但仅用于能量的单向流动。文献[14]中直流微电网通过BIC接入电网,同样仅实现功率单向流动。文献[15]提出了一种自治运行下垂控制策略。上述方案均无法保证两子微网负荷在稳态下均匀分配。
与单个BIC控制方案不同,交直流混合微电网中多并联BIC间存在严重的环流问题,导致系统损耗增加,甚至损坏开关器件。文献[16]对环流产生机理进行详细研究,但数学表达式过于复杂,物理概念不清晰。文献[17]通过实时调节下垂系数实现对环流的抑制,但下垂系数的变化影响了输出电压质量。文献[18]通过减少线路阻抗差异来抑制变换器之间的环流,但该方法引入的虚拟阻尼只呈现感性,与线路阻抗的阻感特性不匹配。文献[19]提出了一种无差拍的电流控制方法,通过零序电流反馈量控制变换器的零序电压,从而有效抑制环流,但该方法难于应用于多台并联的场合。
针对上述问题,本文提出了一种适用于交直流混合微电网中多并联BIC运行的分布式电源管理控制策略。其中每个BIC具有独立的局部分布式控制器,均可检测到网侧公共频率。通过局部分布式控制实现交流和直流子微网间的负荷平衡;根据每个BIC不同的额定功率处理能力,精确实现功率按比例双向流动。通过零矢量前馈控制实现对BIC间的环流抑制,并提出虚拟BIC概念将其应用至多并联BIC中环流控制中,加强环流抑制效果。此外,本文所提出的局部分布式控制可实现模块化设计,一旦新增BIC控制器完成本地调优,即可实现功率传输,从而有利于在实际工程中的广泛应用。
2 多并联BIC的控制原理
图1为交直流混合微电网结构示意图,由交流子微网、直流子微网和多并联BIC三部分组成。
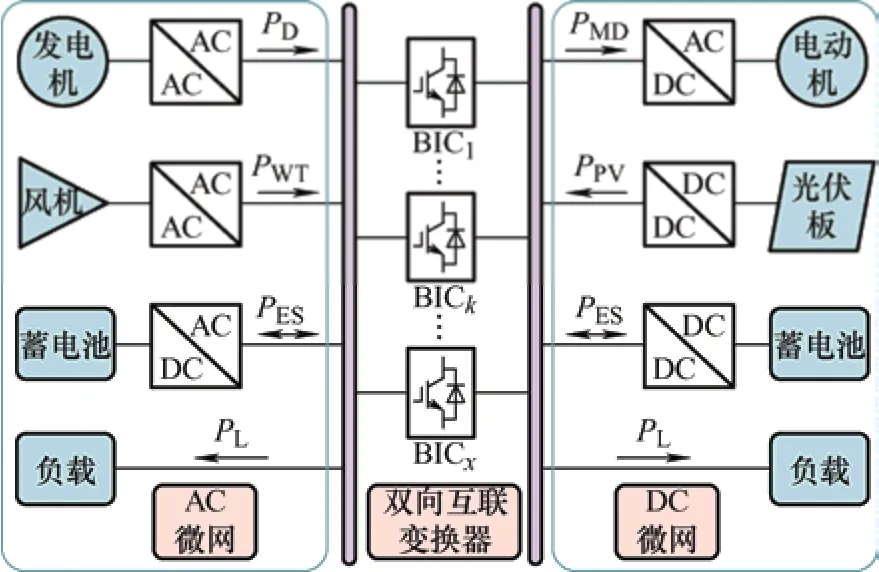
图1 含有多并联BIC的交直流混合微电网拓扑
2.1 BIC的功率流动分析
根据传统电力系统理论,得到交、直流子微网下垂控制方程

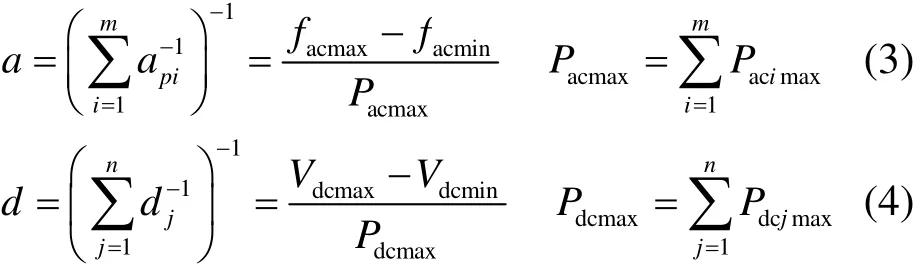
式中,Pacmax和Pdcmax分别为两子微网的最大有功功率。交直流侧负荷状态可分别定义为

以FZ(Vdc)>FZ(fac)为例,为实现交、直流侧功率平衡,将FZ(Vdc)与FZ(fac)差值通过分配特定权重比,计算出给定有功功率参考值ΔPBICs。无论负载处于轻载和重载状态,仅需保证FZ(Vdc)−FZ(fac)不为零,就能够控制BIC使得功率由轻负荷子微网流向另一侧,最终使整个系统将稳定在某一工作点,即FZ(Vdc)=FZ(fac)。因此,根据式(1)和式(2),考虑ΔPBICs影响可得出



当FZ(Vdc)=FZ(fac)时,有

根据上述推导,可利用BIC将交流子微网等效为直流子微网负载,同样直流子微网等效为交流子微网的电源。故应该由所有直流侧子微网提供,并根据各自比例分配给所有交流子微网。
2.2 局部分布式控制器
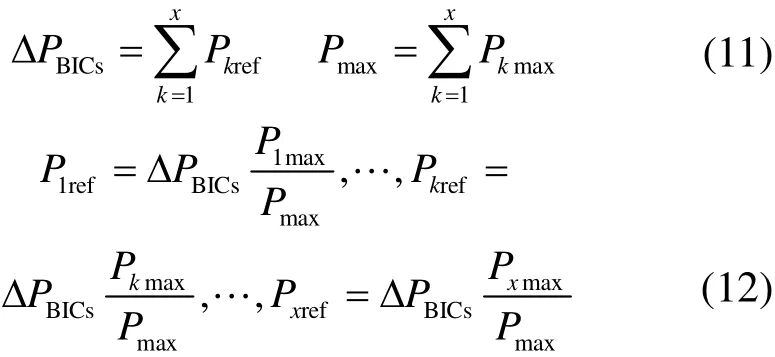
考虑到多个BIC具有不同的额定功率,交流和直流子微网功率分配策略可推广至BIC中。如图2所示,每个BIC采用局部分布式控制,该控制器按特定比例传输到BIC各自的参考功率,从而实现BIC之间功率分配。在设计控制器时,由于ΔPBICs必须由BIC传输,为避免单个BIC过载,选择一个控制目标作为所有BIC功率参考总和,即ΔPBICs,然后按比例分别给定到各个BIC上。
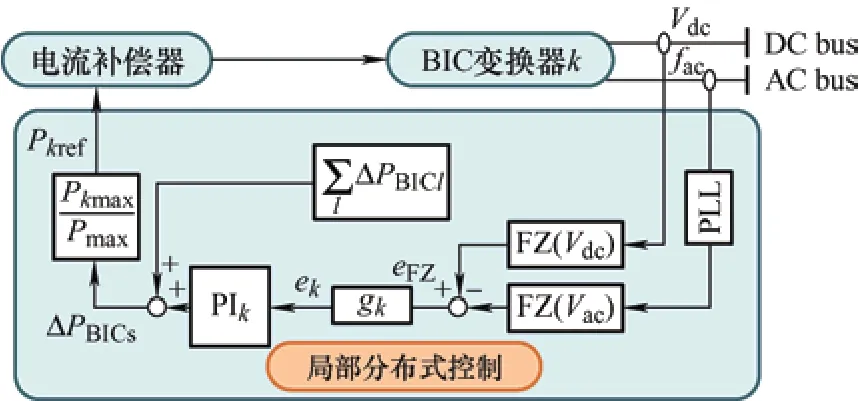
图2 局部分布式控制
经前文分析可知,为实现功率分配需要获取fac和Vdc。由于交流子微网中仅存在一个基波频率,所有BIC均可接收到同一个fac和交流侧负荷状态。为了提高系统的可扩展性,BIC中所采用的通信方式不应该过于复杂。因此,除了式(12)的约束外,直流母线Vdc仅通过主控BIC接收,其他BIC分别通过采集相邻信息实现与主控BIC同步。当主控BIC出现故障时,会将主控身份分配至其余任意指定BIC模块,从而使系统具有即插即用功能。
为了实现上述目标,针对BICk设计了局部分布式控制器

式中,gk为控制增益;ek为误差信号;ΔPBICs为整个BIC所需给定的功率;Pkref为BICk的功率给定值;由于PI控制器的作用,当系统稳态运行时,FZ(Vdc)− FZ(fac)值近似为零,每个BIC的给定功率按各自比例分配。
2.3 电流补偿器设计及环流控制
根据文献[20]中对两并联BIC数学模型分析,得出多并联BIC中第n个BIC的零序电流表达式

由式(14)可知,第n个BIC零序电流由第n个BIC与其他BIC零序占空比差值以及第n个BIC滤波电感决定的。尽管不同BIC之间占空比差异较小,但仍会产生环流。
图3是SVPWM中零矢量修正图[18],为控制环流,在BIC的零矢量中添加修正值y,经计算得到第i个BIC的零矢量占空比为

图3 SVPWM零矢量修正

由式(14)和式(15),得到第n个BIC零矢量校正后的环流表达式

第n个BIC零序电流的等效物理模型可看作一个有扰动的一阶系统。环流控制一般采用PI控制器,但该控制忽略了扰动量的干扰。其中,由其他并联BIC的环流控制器产生,的干扰由不同模块间零矢量占空比差值产生。另外并联BIC间的线路滤波、参考电流和电流控制器动态响应的不同,会导致占空比的不同。
为了消除干扰的影响,本文采用基于SVPWM零矢量电压修正法进行环流抑制。由于环流控制回路中的扰动是由并联BIC占空比与滤波电感差值决定,为增强环流抑制效果,因此在传统PI环流控制器引入前馈项ynf。如图4所示,其中Td为当前采样延迟,TPWM为PWM时间常数。多并联前馈项可表示为

利用零矢量前馈,对扰动进行补偿。在多并联BIC中,零序电流的物理模型可以转化为理想一阶系统。与PI控制器相比,零矢量前馈PI控制器具有更好的环流抑制能力。采用零矢量前馈控制来抵消不同占空比和滤波电感的干扰。第n个BIC零序电流控制框图如图4所示。
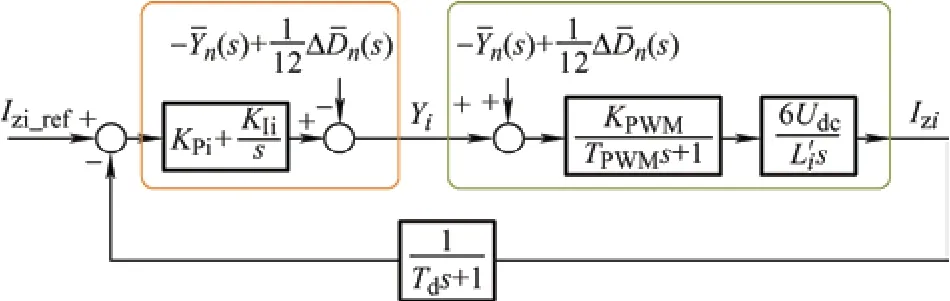
图4 第n个BIC零矢量前馈控制框图
任意BIC环流等效模型为含有两个扰动量ΔD12(s)/12和的一阶系统,作为前馈量消除产生的干扰。控制器可表示为

多并联BIC的零矢量前馈法比两模块并联BIC更为复杂。由文献[21]可知,在一个PWM周期内,每个并联BIC都需要非零矢量、环流控制器的输出以及所有并联BIC的滤波电感,并且环流控制器之间会相互影响。因此,在多并联BIC中应采用环流控制器的协调控制策略。
为了将零矢量前馈方法推广到多并联BIC系统,提出了一种虚拟BIC前馈计算方法,其控制框图如图5所示。
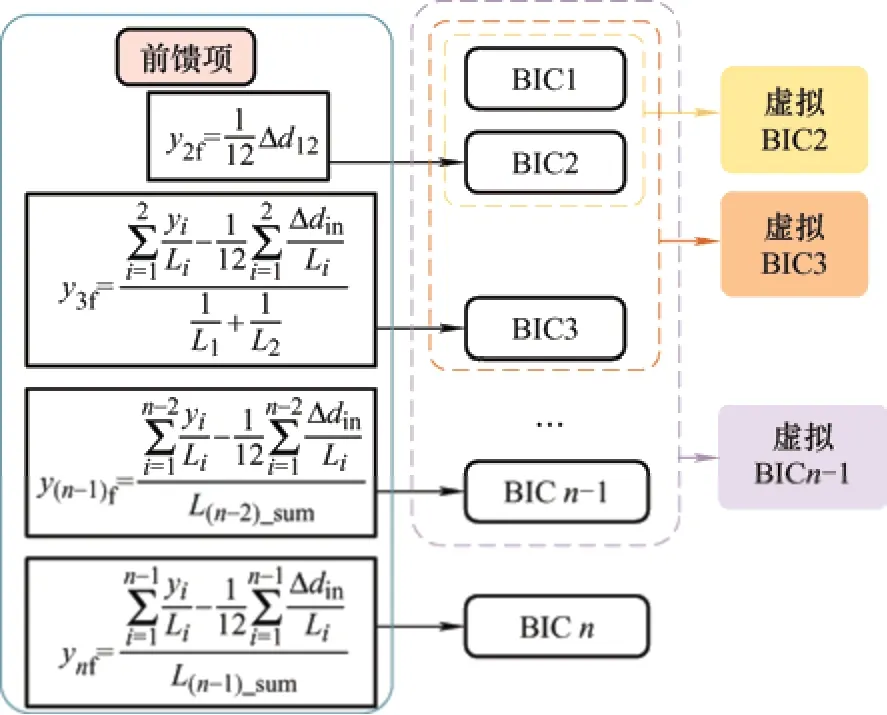
图5 基于零矢量修正的虚拟BIC控制框图
由图5可知,BIC1中无环流控制器。BIC2中环流控制器仅需要控制BIC1和BIC2的占空比,与其他运行状态及参数无关。前两个BIC的非零矢量差值由前馈补偿,PI控制器用于抑制已有的环流,因此BIC1和BIC2之间环流能够得到有效抑制。BIC1和BIC2可看作一个虚拟BIC(虚拟BIC2);而在第三个变换器中,只考虑BIC3与虚拟BIC2之间的环流,同理类推。本文仅使用前三个BIC的状态进行计算验证。通过PI和零矢量前馈控制器将虚拟BIC2与BIC3之间的环流抑制为零。同样,该方法可以推广到n并联BIC。前n−1个BIC为虚拟BICn−1,前n−1个BIC之间无环流。
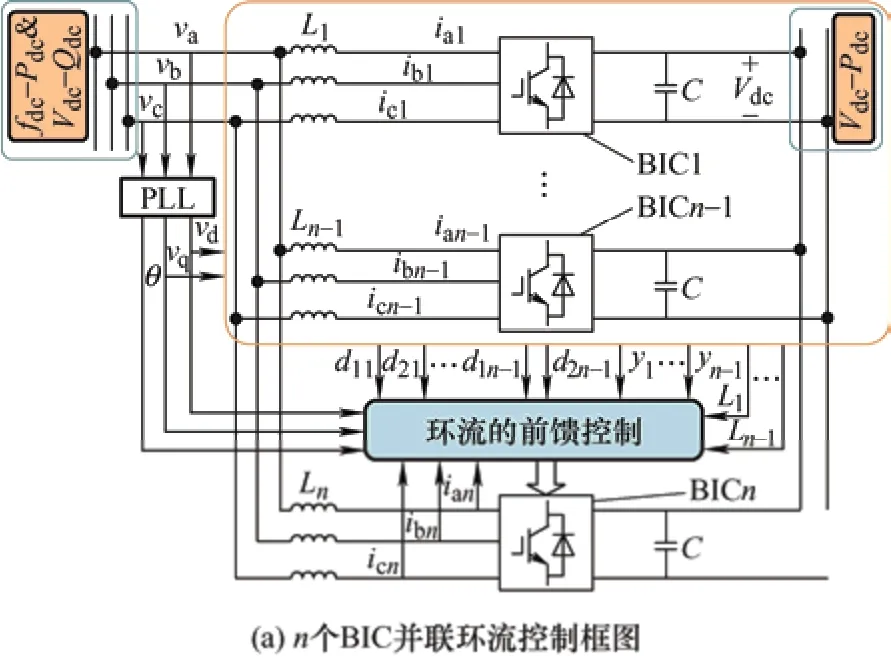
采用n个并联BIC的系统控制框图如图6所示,其中图6b为第n个BIC模块控制框图。BIC1环流不需要控制,y1=0。其他n−1个BIC修正值yi可通过图4中给出的反馈控制计算得到。经零矢量修正值yi,n−1个BIC中非零矢量占空比和第n个BIC中零序电流izn计算可得yn。

图6 n个BIC并联的系统框图
3 BIC功率流动整体控制框图
基于局部分布式控制和多并联BIC环流控制策略,构建出系统总控制框图,如图7所示,虚线框内为主拓扑图,BICk框图中k=1,2,3,即三台BIC并联;实线框内包括交直流微电网和BIC的控制框图。为了降低模型验证的复杂度,交流子微网中简化为一个基于电压源型逆变器的分布式发电装置,采用下垂控制策略,实现功率分配以及获取参考输出电压,然后将参考输出电压输入到传统的双闭环控制系统。直流子微网简化为一个基于Boost直流变换器的分布式发电装置,含有直流下垂控制环路,电压外环控制环路和电流内环控制环路。
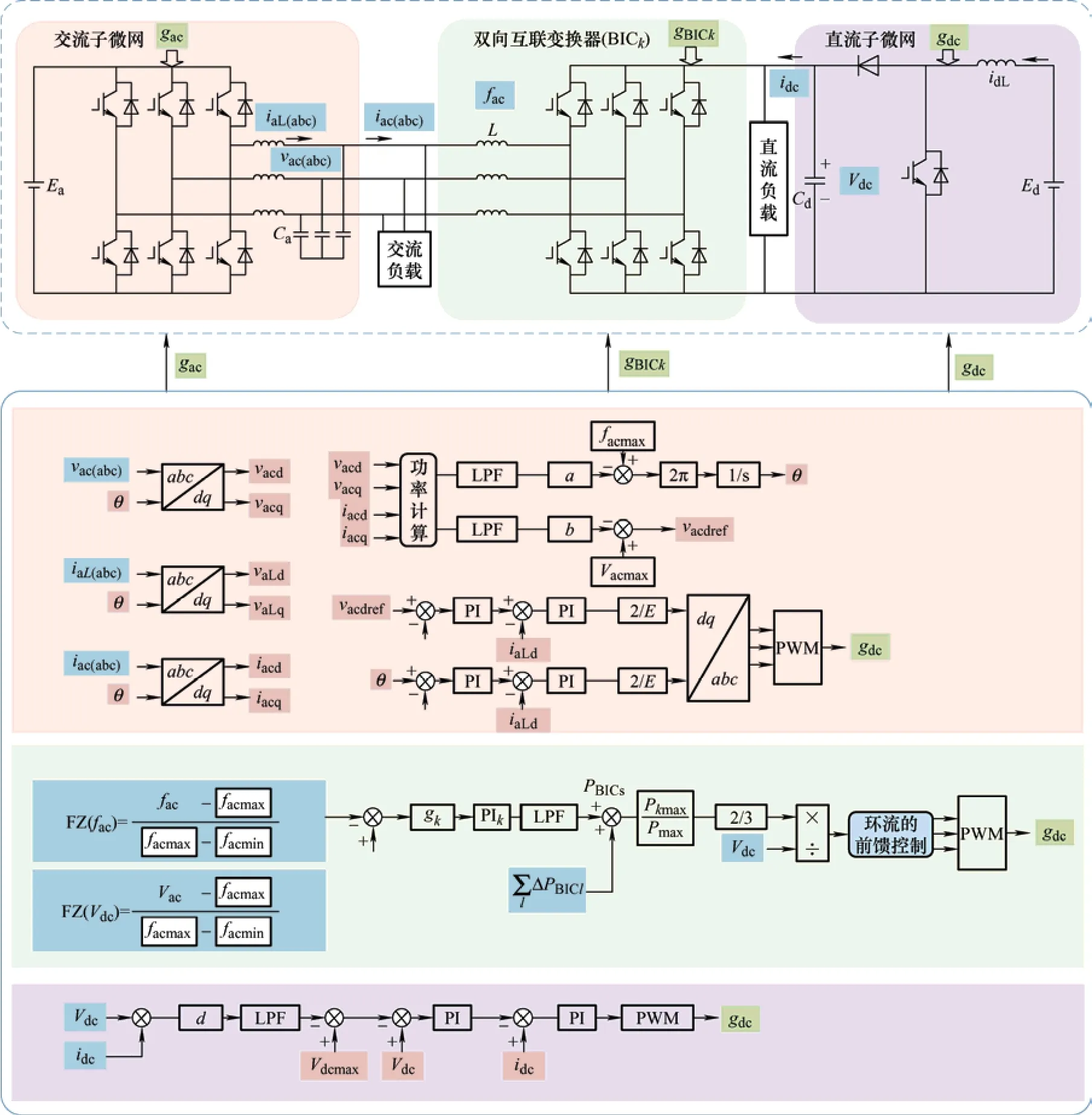
图7 系统功率流动整体控制框图
BICk控制目的是实现交、直流子微网间的功率流动。首先通过锁相环采集基波频率fac,并测量直流电压Vdc。将fac和Vdc标幺化作差,经PI控制器得到ΔPBICs,并通过对三个并联BIC额定功率值进行设定,可实现BIC功率按比例分配。此外,采用零矢量前馈控制实现对BICk间环流的抑制。
4 仿真与试验分析
为了验证所提出多并联BIC控制策略的可行性,在Matlab/Simulink中搭建了多并联BIC交直流混合微电网仿真系统,包括交流侧DC/AC,直流侧DC/DC和三台并联BIC,主要参数见表1。

表1 交直流混合微电网系统主要参数
图8给出了三台BIC同时启动,然后依次将非主导BIC脱离系统的波形图。图8a所示,首先运行交、直流子微网,BIC不运行,交流负荷功率为20.01 kW,频率约为50.01 Hz;直流负荷功率为30.02 kW,电压约为695.0 V。显然,此时交流负荷小于直流负荷,当启动BIC后,交流子微网将向直流子微网提供部分功率,最终两侧发电功率均稳定为25.03 kW。交流侧频率和直流侧电压分别稳定为49.76 Hz和697.5 V。三台BIC传输功率分别约为−0.82 kW,−1.66 kW,−2.49 kW,能够准确地按额定功率比例1∶2∶3分配传输功率。如图8b、8c所示,当依次切断BIC3和BIC2,其余BIC按额定功率比例承担剩余所需传输功率,以保持交直流侧负荷稳定。综上所述,文中所提出的控制策略可实现交直流侧功率根据不同功率等级的BIC比例进行功率分配,且具有即插即用的功能。

图8 BIC按功率等级比例分配功率验证
在图8a的基础上将主控位置由BIC1转换为BIC2,其结果如图9所示。不难看出BIC1变为0 kW,而BIC2和BIC3分别变为−2.02 kW和−2.99 kW,在此过程中交、直流子微网提供的功率始终保持稳定。因此验证了本文控制策略具有较好的容错性。
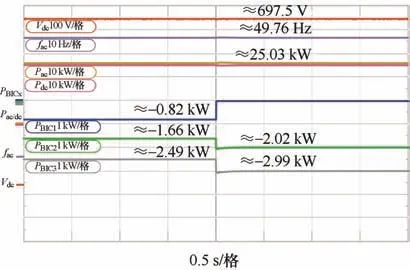
图9 多并联BIC中主从位置改变对系统的影响
图10验证了该控制策略可实现系统中功率双向流动。在图8a稳定运行的基础上在交流侧增加15 kW的负载功率,交流侧频率下降至49.38 Hz,直流侧电压下降至693.7 V,交直流侧功率波动后均稳定在32.56 kW,BIC功率分别上升,由反向流动变为正向流动的0.42 kW、0.83 kW和1.26 kW,可发现该控制策略能实现功率双向流动,其输出功率比值仍保持为1∶2∶3,再次验证了功率可按比例分配。

图10 BIC功率双向流动验证
图11a为图10基础上BIC电流变化,电流幅值大小和BIC功率流动量相对应,通过缩短时间刻度可看出电压幅值基本稳定在311 V,各BIC电流幅值大小约为1.76 A、3.54 A和5.31 A,比值为1∶2∶3,且电流基本未发生畸变。图11b采用传统PI环流控制,对比发现,在不同滤波电感参数情况下上文提出的环流抑制方法可提高多并联BIC环流的抑制效果。

图11 BIC环流抑制验证
为进一步验证控制策略的有效性,利用硬件在环试验平台上对所建立的多并联BIC交直流混合微电网进行实时仿真运行,图12为硬件在环仿真试验平台。分别对系统中功率按比例分配、功率双向流动和环流抑制效果进行验证。

图12 硬件在环仿真试验平台
运行交直流侧子微网至稳定状态,同时启动并联BIC后主要变量变化如图13a、13b所示,当系统接入并联BIC后,由于交直流侧负荷不平衡,直流侧负荷功率由30.01 kW减至25.01 kW,交流侧由20.02 kW增至25.01 kW,交直流两侧负荷达到平衡状态。同时,直流侧电压由695.0 V增至697.5 V,交流侧频率由50 Hz降至49.75 Hz。三台BIC传输功率分别为:−0.83 kW,−1.63 kW,−2.51 kW,比值约为1∶2∶3,与额定功率比例一致。当突然关闭BIC3后,如图13c所示,BIC1与BIC2仍按比例分配传输功率。从而进一步验证了本文控制策略能够实现BIC功率按比例分配以及具有即插即用的功能。
以图13稳定运行为基础,在交流侧增加15 kW功率负荷,如图14所示。交、直流侧功率在0.3 s内均达到稳定平衡状态,即Pac=Pdc=32.52 kW,交流侧频率和直流侧电压分别下降至49.38 Hz和693.7 V。三台BIC传输功率分别由−0.83 kW、−1.63 kW、−2.51 kW增至0.42 kW、0.83 kW、1.26 kW,比值仍为1∶2∶3。

图13 功率按比例分配试验验证

图14 功率双向流动试验验证
为了验证零矢量控制策略对环流的抑制效果,在图14的基础上对BIC电压电流波形展开分析,如图15所示。交流电压幅值约为311 V,电流波形正弦化,畸变较小,BIC1、BIC2、BIC3中a相电流幅值比约为1∶2∶3。
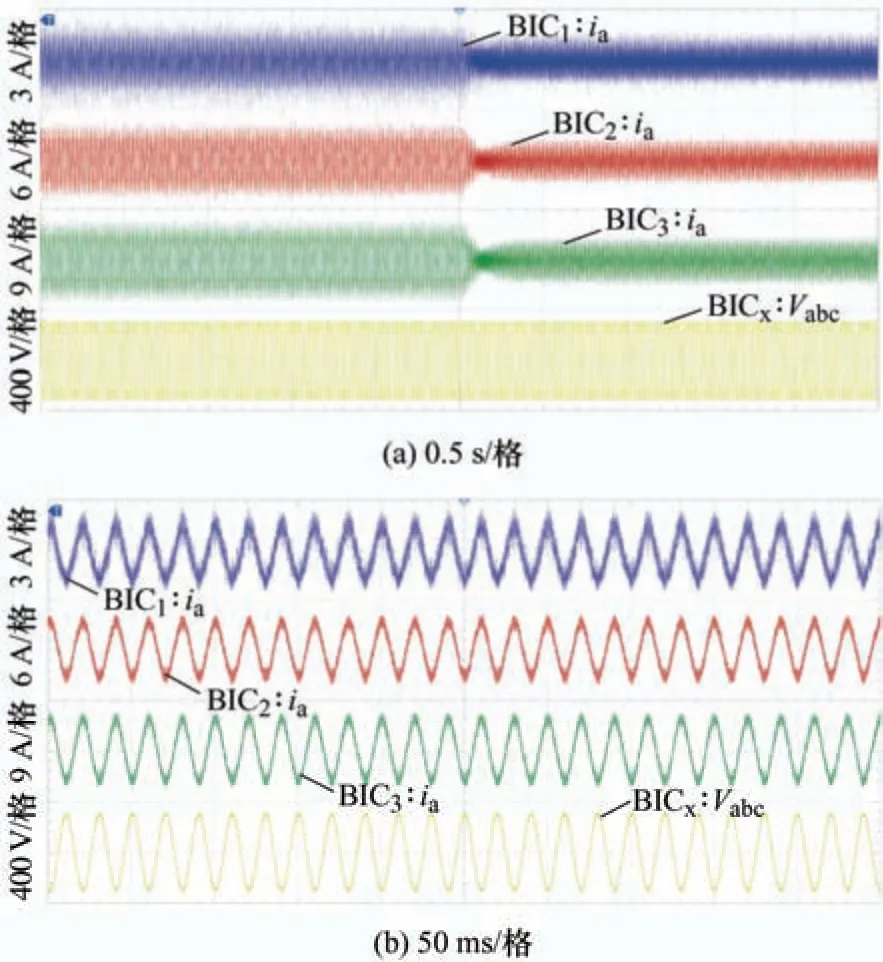
图15 环流抑制试验验证
综上所述,从图13~15中可知,硬件在环试验结果和仿真结果具有较高的一致性,从而验证了本文所提出控制策略的正确性和有效性。
5 结论
本文在传统下垂控制基础上,提出了一种局部分布式控制策略,从而实现交直流混合微电网中多级并联BIC的功率按比例分配;其次,后级基于零矢量前馈控制策略,提出虚拟BIC概念实现多并联系统中的环流抑制,通过仿真和试验得到以下结论。
(1) 文中所采用的控制策略可实现多并联BIC功率高精度分配,误差控制在100 W以内。
(2) 针对多并联BIC中滤波电感参数的差异性,仍能较好地实现环流抑制,具有良好的鲁棒性。
(3) 实现了多并联BIC的即插即用功能。
