海上地震勘探综合导航模拟测试系统软件设计与实现
2022-05-20翟慧杰张昊楠
翟慧杰 张昊楠
(中海油田服务股份有限公司物探事业部,天津 300450)
0 引言
拖缆地震勘探是海洋油气勘探的主要施工方式之一,在其作业过程中,综合导航系统处于指挥和控制中心地位。综合导航系统在作业中需要接入DGNSS、电罗经、测深仪、RGNSS 及水鸟等多种数据,这些数据的格式不同,采样率从0.1 秒到数十秒,通过网络及串口传输,同时综合导航系统还需控制触发拖缆控制与定位系统、地震采集系统及枪控系统,在整个作业过程中涉及大量的数据交互及命令控制。中海油田服务股份有限公司经过多年技术攻关,形成了以海途HQI-Navi®实时综合导航系统软件及导航采集控制平台INSP (Integrated navigation system platform)在内的拖缆综合导航系统产品。
由于海上试验环境特殊,系统无法长期在海上进行试验,而室内测试,则难以搭建测试环境,因此需开发一套综合导航模拟测试软硬件系统,可模拟海上试验场景。QT 是一个基于C++语言开发的跨平台图形化用户界面应用程序开发框架,文献[5]设计了一套基于QT 多线程多串口的综合导航模拟上位机软件,但该软件直接通过串口连接到导航INSP 箱体,无法对触发信号进行配置及控制,且对数据的支持格式有限。本文针对海上拖缆地震勘探综合导航系统的室内开发测试需求,设计了一套可与综合导航模拟测试系统硬件相配合的上位机软件,对软件的需求及设计方案进行探讨,并进行功能模块划分和设计开发。
1 需求分析
海上拖缆地震勘探作业中,综合导航系统收发的数据可分为3 类:
(1)被动接收,接入的传感器种类多,数量大,包含DGNSS、RGNSS、电罗经、测深仪、水速仪等,其中DGNSS 和电罗经一般需要各接入3 套,数据格式也存在差异,该类数据完全按照传感器自身的采样间隔,通过RS232 或RS422 串口,遵循相应的通信参,持续不断发送到导航系统中。
(2)是通过导航控制平台主动触发后接收到的数据,主要包括枪阵数据和罗经鸟、声学鸟、水平鸟、声速鸟等数据,一般枪阵数据每炮触发采集1 次,通过串口发送到导航系统,各类水鸟数据按照作业配置1~2 炮触发采集1 次,主要通过网络传输,罗经鸟数据也可支持串口传输。
(3)主动发送,每炮响炮前将炮号和炮源发送给震源控制系统,响炮后收到枪数据,合并生成仪器头段数据,发送给拖缆采集系统,2 种数据均通过串口发送。不同传感器数据的具体信息见表1。

表1 传感器采样间隔
上位机软件需要完成数据模拟及抽取,并通过通信接口将模拟数据发送给导航模拟测试机箱(硬件设备)进行进一步的格式、内容和时序的处理操作。同时,需要配合模拟实际作业中枪控、鸟控、采集系统的触发控制,数据的发送依赖于特定的时序。此外,上位机还可监控导航系统发出的枪头段和仪器头段。具体如下:
(1)二维、三维导航定位数据抽取及模拟。
(2)串口数据模拟发送:实现对DGPS、RGPS、电罗经、测深仪、罗经鸟、枪阵、头段数据的模拟发送,可进行串口配置。
(3)网络数据模拟发送:实现对声学鸟、水平鸟、罗经鸟、声速鸟等数据的模拟发送,通过导航模拟测试机箱以网络方式发送给综合导航系统。
(4)同步控制:模拟实际作业中枪控、鸟控、采集等系统的触发控制,数据的发送依赖于特定的时序。
(5) 能够与导航模拟测试机箱进行数据通信,支持通信参数配置。
2 导航数据模拟方法
数据模拟是上位机软件的主要功能之一,主要实现方式为解析P294 文件,按照配置格式,生成每个传感器数据的数据文件及时间间隔文件。
P294 是国际通用的拖缆地震勘探原始数据交换文件,由头信息和数据信息两部分构成,其中头信息规定了勘探船的作业配置信息,包括传感器的种类、数量,各传感器的观测值ID、挂载位置等信息,数据信息部分按照P294 规定的数据格式,记录传感器数据。P294 中记录的数据格式与传感器的原始数据格式不同,因此在进行数据模拟时,首先,根据P294 文件头的配置信息确定数据种类、数据格式,以及数据对应的观测值ID;其次,在P294 文件数据记录部分,将各传感器数据,按照导航控制平台可接收的数据格式,进行数据合成,生成每个传感器的数据文件,同时根据各传感器相邻数据的时间间隔,生成对应的时间间隔文件。RGNSS 数据中包含了多个传感器数据,但在P294 文件中仅定义了一个观测值ID,需在生成数据文件前,对每个RGNSS 传感器配置独立的ID,该ID配置需和综合导航系统中的参数配置保持一致,才可使得数据发送到综合导航系统时被正常解析。
除了水鸟数据外,所有数据格式均为标准ASCII数据串,水鸟数据为16 进制格式,在解析P294 文件进行模拟数据生成时也需按照综合导航系统中的参数进行拖缆的平台配置。
3 软件设计及实现
3.1 架构设计
综合导航模拟测试系统的软件报告上位机软件和ARM 嵌入式软件两部分。软件架构示意图如图1所示,考虑到上位机与嵌入式设备性能上的差异,上位机软件主要用于与用户进行交互,实现数据处理与显示等复杂功能。嵌入式软件主要用于数据的接收与转发。上位机软件与ARM 嵌入式软件使用网络通信方式连接,通过socket 相交互,拥有该socket 的类,通过对接收的协议数据进行解析,控制数据的发送。

图1 软件架构示意图
3.2 软件设计及实现
综合导航模拟测试系统的上位机软件基于QT5开发,采用C++语言,可跨平台运行在有Windows 或Linux 操作系统的计算机上,以实现导航原始数据的模拟及多种指定格式数据的控制发送,配置通信参数,监控系统的运行状态。其主要功能为:
(1)系统参数配置,包括网络配置、P2 文件抽取文件目录及参数配置、串口通信参数配置、触发端口及触发时序配置等,参数配置可保存及加载。
(2)导航数据模拟,对P2 文件解析及数据抽取,支持多种数据种类及数据格式,支持整个文件抽取及部分炮号抽取。
(3)显示数据发送、接收及触发状态,监控收到的头端数据内容。
(4)系统运行控制,包括打开与关闭串口、开始与结束发送、数据计数清零等;综合导航模拟测试系统上位机软件运行界面如图2 所示。
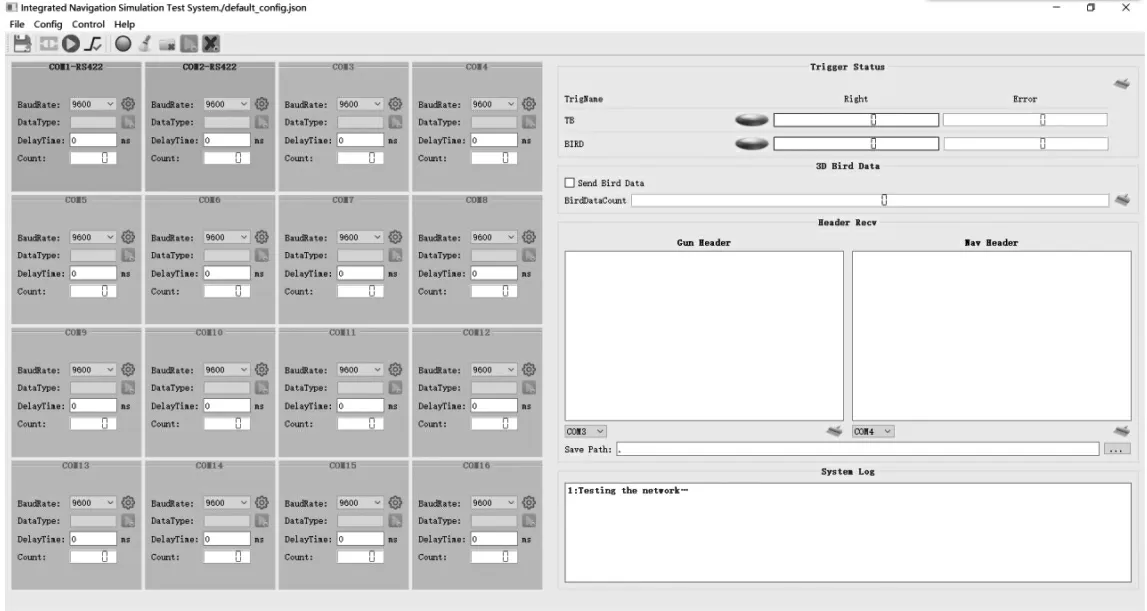
图2 上位机软件
4 结语
本软件针对多套拖缆导航数据进行了数据模拟及发送测试,能有效支持拖缆综合导航系统的室内开发测试,后续将进一步增加对海底电缆P2 数据的支持,为海底地震勘探综合导航系统的研发提供支撑。
