有界广义GMM和无阈值递归图的特征提取方法及应用
2022-05-19赵心阳
赵心阳,肖 涵,2,吕 勇,2
(1.武汉科技大学机械自动化学院,湖北 武汉 430081;2.武汉科技大学冶金装备及其控制教育部重点实验室,湖北 武汉 430081)
1 引言
齿轮传动广泛应用于机械设备中,但由于工况的复杂多变,齿轮自身也容易发生故障,统计表明,在齿轮箱的全部零件中,齿轮自身失效引起的设备故障约占全部故障的60%[1],因此针对齿轮故障诊断方法的研究一直是近年来的热点。齿轮振动信号更多的表现出非线性、非平稳特征是普遍共识[2],学者往往将振动信号的非线性特征,如Lyapunov指数、分形维数、熵等用于故障诊断,取得一定的效果[2-3]。但由于振动信号通常信噪比较低,而上述参数对噪声较敏感,导致其作为特征量时,故障识别精度不高。
递归性是动力学系统的基本属性之一,1987年Eckman基于相空间重构理论提出递归图(Recurrence Plot,RP)分析方法[4],用以从递归图的内部层状结构揭示时间序列的复杂性和可预测性,包括传统阈值递归图(Thresholded Recurrence Plot,RP)和无阈值递归图(Un-Thresholded Recurrence Plot,URP)。为了解决递归图分析方法无法定量描述动力学特性等问题,文献[5-6]提出传统阈值递归图特征提取方法-递归定量分析(Recurrence Quantifica⁃tion Analysis,RQA)。通过研究递归点的分布规律,研究者已提出的递归参量已达20余种,且已应用于设备故障诊断领域。但递归参量的选择往往由研究者主观确定,且故障识别精度有待提高。由于URP中递归点间的距离参数被保留下来,因此对于同一时间序列,URP 中往往包含比RP 更多的信息量,近年来针对URP 的研究逐渐成为热点。2018年,文献[7]提出利用URP 分析方法检测绝缘电力电缆因热老化引起的劣化程度。文献[8]根据URP中的欧式距离分布提出了一种基于无阈值递归矩阵的检测器,用于检测噪声环境中信号的出现。但上述研究均是从定性角度分析,无法定量描述URP,限制了其应用。这里提出一种采用有界广义高斯混合模型(BGGMM)进行URP特征提取的方法,用于URP的定量分析,并应用于齿轮故障分类。
2 算法
2.1 无阈值递归图
递归图作为时间序列中重复模式的图形表示,是分析时间序列周期性、混沌性以及非平稳性的一个重要方法[2]。算法流程如下:
(1)对于一维时间序列xi(i=1,2,3,…N),经相空间重构后,得到高维相空间:

式中:Nd=N-(d-1)τ,τ—延迟时间;d—嵌入维数。
(2)对于相空间中的轨迹x→i(i=1,2,…Nd,x∈Rd),无阈值递归图定义为:

式中:‖ ∙‖—向量范数,常用范数包括1-范数,2-范数和∞-范数,这里采用∞-范数;与传统阈值递归图不同,无阈值递归图由于没有阈值ε的限定,其递归矩阵Ri,j(unthres)—相空间中两个向量x→i和x→j之间的欧式距离。
2.2 有界广义高斯混合模型
基于高斯分布的混合模型一直都是研究的热点,广泛应用于模式识别、图像处理和故障诊断等领域。其中高斯混合模型(GMM)[9]是应用较多的混合模型之一,但由于其具有奇异性,即样本数不足时参数估计会更加困难,从而导致算法发散。为解决GMM 的不足,学者提出更具鲁棒性的广义高斯混合模型(GGMM)[10]。相较于传统GMM,GGMM 嵌入额外参数λ用以控制拟合曲线尾部凸起与否,因此可适应更多类型数据。但是上述混合模型都未考虑数据边界问题,当数据存在支撑边界时,将导致参数估计存在较大的偏差。因此文献[11]2014年提出有界广义高斯混合模型(BGGMM)用以拟合高斯分布和非高斯分布数据,并考虑数据的边界问题,近年来广泛用于模式识别等领域。文献[12-13]成功将BGGMM 应用于视频和图像降噪以及图像分割领域。文献[14]结合独立分量分析方法(ICA)和BGGMM成功实现对关键字进行无监督识别。
2.2.1 算法简介
高斯混合模型(GMM)是单高斯概率密度函数的延伸,广泛应用于模式识别、图像处理、故障诊断[6]等领域。
K个分量的GMM,其定义为:

式中:Θj—模型参数,ωj作为混合权重系数,满足ωj≥0。

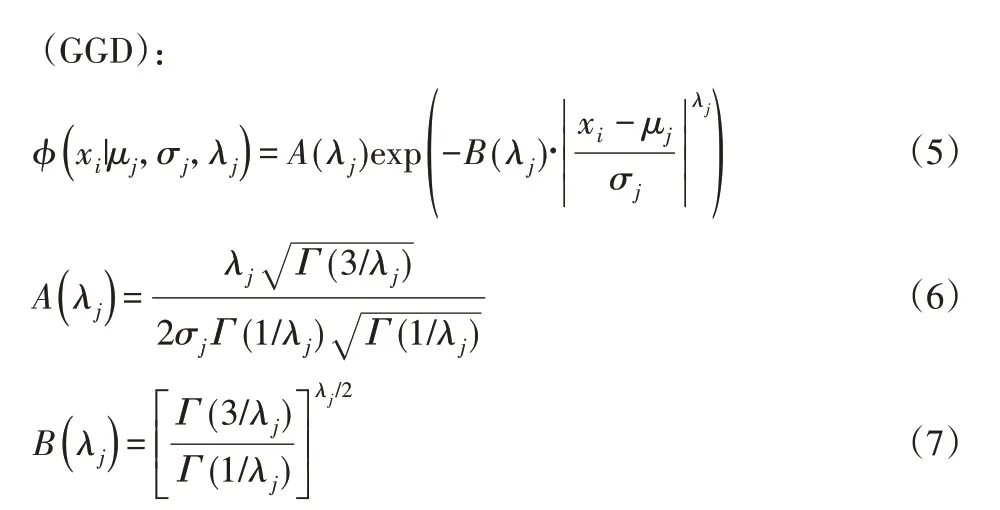
式中:μj和σj—混合模型中的均值和方差,参数λj控制该分布的尾部凸起与否;Γ(∙)—伽马函数。值得提出的是,GMM 和GGMM是BGGMM的特殊情况:当λj=2,H(xi|Ωj)=1时,式(4)可表示为GMM的概率密度函数;当H(xi|Ωj)=1时,表示为GGMM的概率密度函数。
2.2.2 参数估计
期望最大化(Expectation-Maximum,EM)算法在统计学中广泛被用于参数的最大似然估计,同时也是基于高斯分布的混合模型中常用的参数估计方法[15]。EM算法以迭代的形式实现最大似然函数的最大化,包括E-Step 和M-Step,在这里所应用的BGGMM中,最大似然函数定义如下:

为了最大化式(8),采用其负数方程作为误差方程,此时最大化似然函数即等效为最小化误差式(9),误差方程定义如下:

在E-Step中,后验概率定义为:

在M-Step 中,根据式(10)得出的后验概率更新模型参数如下:
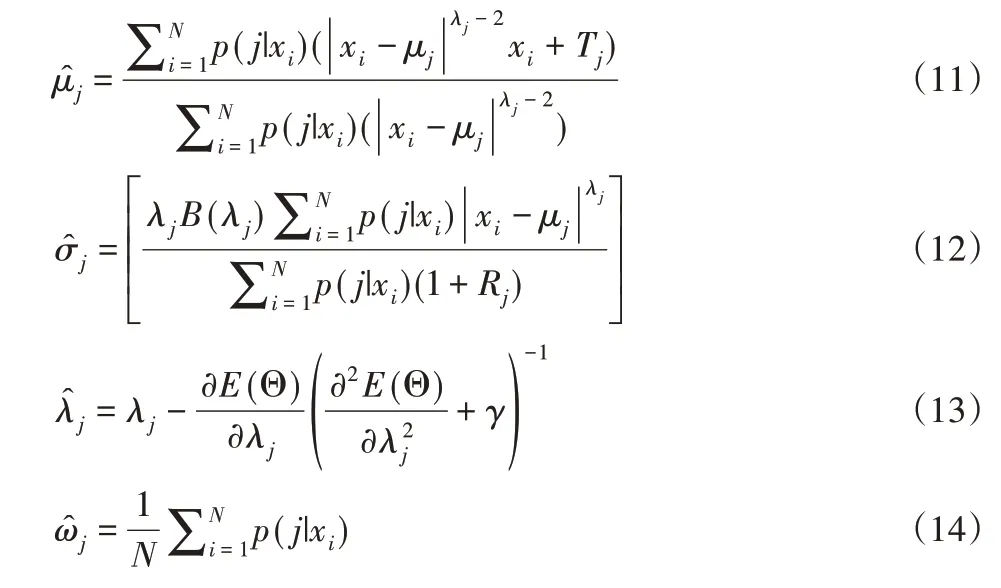
其中:

式中:γ—比例因子—从混合模型特定组分j的广义高斯分布中提取的随机变量;M—大正整数;当x≥0时,sign(x)=1,否则sign(x)=0。
最后,对式(9)中的误差函数进行评估,检查收敛准则。若不满足收敛条件,则从E-Step重新开始下一次迭代,直到满足收敛准则为止。
3 URP统计定量分析
无阈值递归图(URP)可以检测递归点之间距离的微小变化,而如果这些变化小于预定义的截止距离,则在RP中无法检测到。因此,URP中的模式可以比RP提供更多的信息。为了从统计学角度量化URP,这里提出采用BGGMM进行URP统计定量分析方法,算法流程如下:
(1)输入时间序列x(t);
(2)通过式(1)和式(2)经相空间重构获得无阈值递归矩阵Ri,j(unthres),然后将递归矩阵中值的直方图进行归一化处理;
(3)初始化模型参数Θ=(ωj,μj,σj,λj);
(4)通过式(10)式(14)迭代更新模型参数Θ;
(5)检测迭代收敛准则。若不满足,返回步骤(4)继续迭代,直至满足条件,迭代停止;
(6)输出均值和方差,组成特征向量(μ,σ),对URP进行定量描述。
本节中,为了验证该方法的有效性,利用两组仿真信号进行分析。(1)周期信号:x(t)=sin(2π10t);(2)Lorenz信号:

周期信号和Lorenz信号的时域波形图、对应的URPs以及归一化后的欧式距离分布直方图,如图1所示。从图1可看出,正弦周期信号URP的递归点沿主对角线平行或垂直分布,而混沌信号URP中出现大量平行与主对角线的线段。其对应的分布直方图近似服从于高斯分布,所不同的是,图1(a)中的直方图明显存在数据边界,数据也更加分散;图1(b)中,数据更接近于高斯分布,且相对集中,这表明原始信号存在差异。经BGGMM拟合(K=1),提取均值分别为1.45和1.92,方差分别为7.04和1.91,提取的均值和方差均存在差异,其中方差存在较大的差异也解释了直方图数据的集中程度的不同,这表明混合模型的参数可作为URP的定量分析指标。

图1 仿真信号时域图及其对应的URPs和欧式距离分布直方图Fig.1 Time-Domain Plot and their URPs as well as the Euclidean Distance Distribution Histogram of Simulate Signals
4 齿轮故障分类识别实验
这里将该方法应用于齿轮故障的分类,提出的齿轮故障分类算法的流程图,如图2所示。

图2 齿轮故障分类算法的流程图Fig.2 The Flowchart of Fault Classification Algorithm
4.1 实验装置
为了验证所提方法的有效性,通过齿轮故障实验台采集不同齿轮状态下的振动信号,实验台及其结构简图,如图3 所示。实验台包括550w(220V-50Hz)电机,带有一对啮合齿轮的齿轮箱,联轴器和磁粉制动器。其中,电机的转速和负载在(300~1217)r/min和(0~20)N·m范围内变动;小齿轮的齿数为20,大齿轮37,模数均为3;振动信号由安装在输入轴承座的垂直方向上的加速度传感器采集。
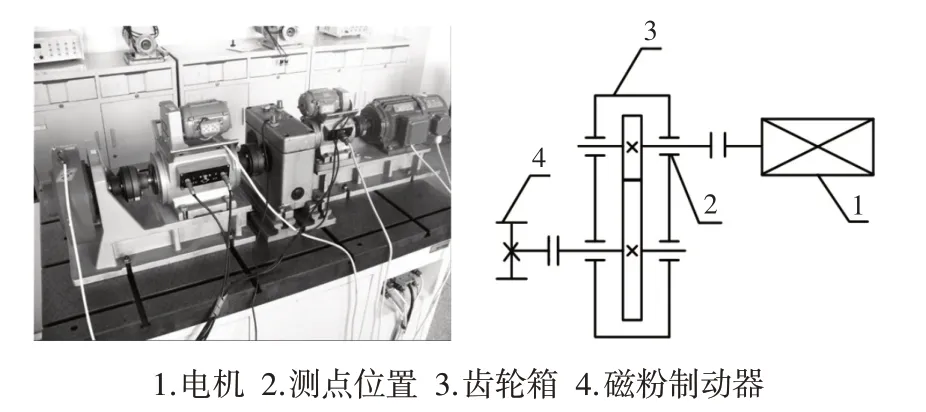
图3 齿轮故障实验台及其结构简图Fig.3 Gear Failure Test Table and its Structure Diagram
4.2 时域信号及无阈值递归图
采用上述实验台,分别采集四种齿轮状态的振动信号各100组,采样频率10kHz,采样时间0.1s。四种齿轮故障状态的时域信号波形图及其对应的URP,如图4、图5所示。原始信号不进行降噪处理,采用虚假邻域法确定嵌入维数d=4,平均互信息算法[16]确定延迟时间τ=4。
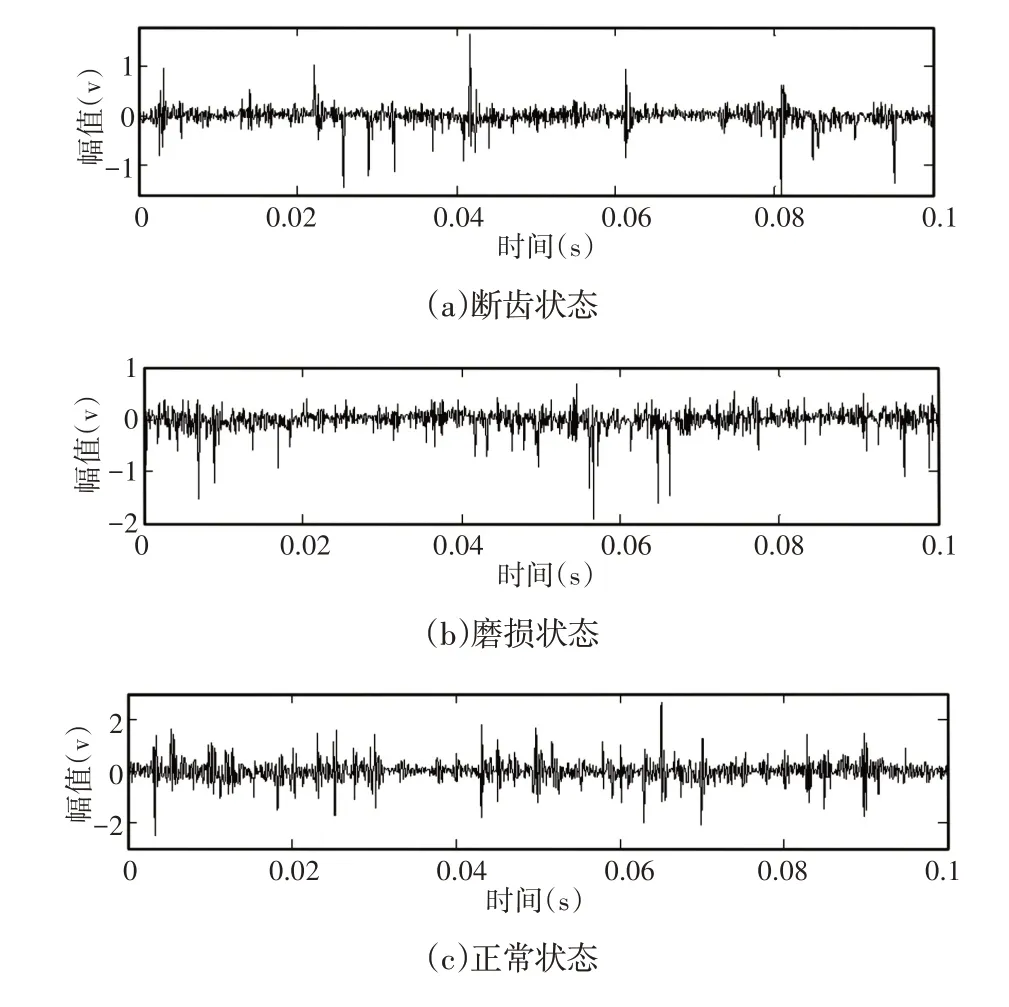

图4 四种齿轮状态时域波形图Fig.4 Time-Domain Signals of Four Gear States
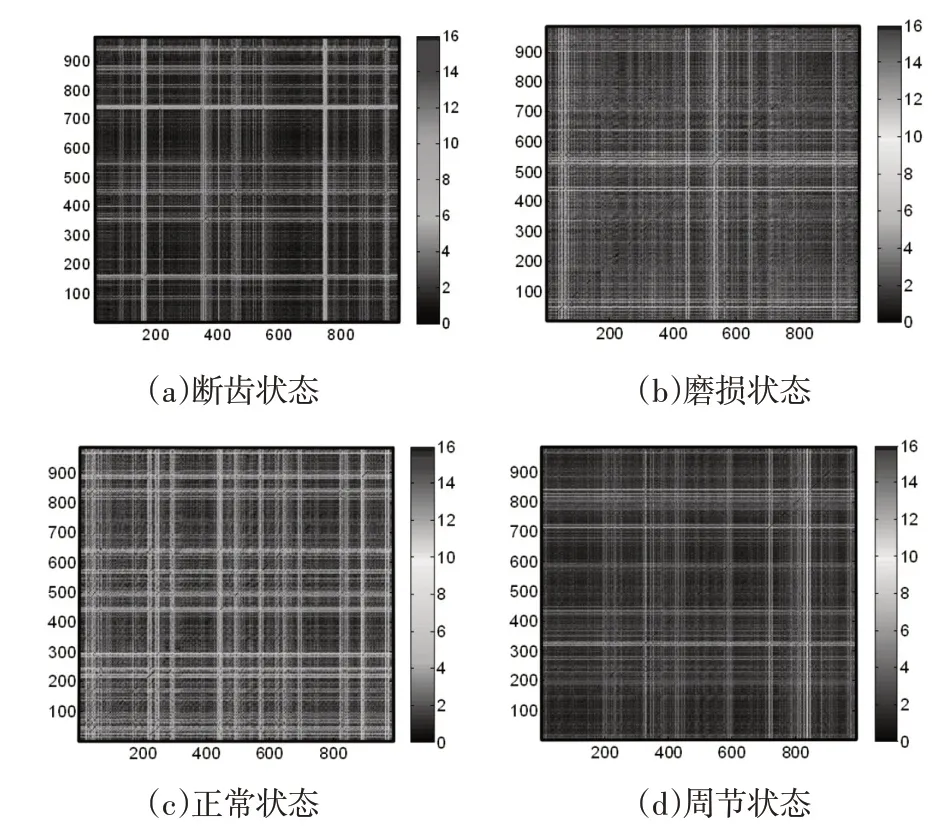
图5 四种齿轮状态的无阈值递归图Fig.5 Un-Thresholded Recurrence Plots of Four Gear States
从时域波形图看,原始信号掺杂噪声较多,无法直接从原始时域信号区分四种齿轮故障状态;从URP中看出,递归图中的递归点主要呈垂直分布,动力学系统所决定。
4.3 故障识别结果及对比
无阈值递归图中,向量之间的欧式距离大小由颜色深浅不一的递归点映射在图像中,如图5 所示。四种齿轮故障模式下的URP 颜色深度不同,表明递归点的欧式距离分布存在差异。应用BGGMM 拟合URP 中递归点欧式距离分布直方图,并提取均值和方差组成特征向量(μ,σ)用以齿轮的故障分类。分别以均值(μ)和方差(σ)为横纵坐标绘制,如图6 所示。由图6 可以看出,四种齿轮故障状态下的振动信号特征向量的分布存在较大的差异,除了断齿和周节两种状态存在少量重叠外,四种故障齿轮的特征向量基本完全被分开。

图6 BGGMM提取的特征向量分布情况Fig.6 Distribution of Feature Vectors Extracted by BGGMM
为了验证该方法的有效性,将所采集的各齿轮故障状态数据按1:1的比例分为训练数据和测试数据,即前50组数据用于训练,后50组数据用于测试,建立高斯混合模型,应用贝叶斯最大似然分类器进行分类。并与传统RQA的10种递归定量[16](RR、DET、L、Lmax、ENTR、LAM、TT、Vmax、T1/T2)作为特征向量时的识别率进行比较,结果如表1所示。
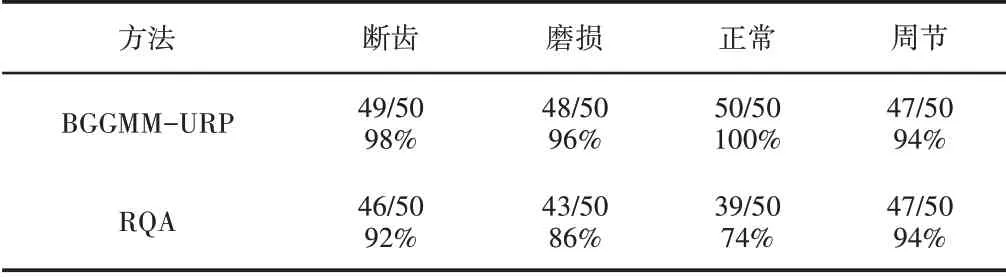
表1 URP定量分析和传统RQA方法的识别率Tab.1 Identification Rates of URP Quantitative Analysis and Traditional RQA Methods
从表1可以看出,基于BGGMM的URP定量分析方法的识别率明显高于传统RQA方法,四种齿轮故障状态的识别率均高于90%,其中对齿轮正常状态的识别率较高,达到100%。对于齿轮磨损和正常两种状态,较传统RQA 方法分别提高10%和26%。表明这里所提出的齿轮故障分类方法具有一定的优势。
5 结论
近年来,递归定量分析广泛应用于故障诊断等领域,但其诊断精度有待提高,此外,目前缺乏针对无阈值递归图定量分析的有效方法。这里提出一种采用BGGMM进行URP特征提取的方法,用于定量分析URP,并成功应用于齿轮的故障分类中。实验结果显示,与传统的RQA方法相比,该方法在齿轮故障识别方面具有更好的性能和更高的分类精度。
所提方法是从模式识别的角度,对无阈值递归图的一种统计定量分析方法,将递归矩阵中欧式距离的分布直方图的统计参数作为定量分析指标。但提出的定量指标所对应的动力学特征还需进一步研究,此外,研究其它的统计学参数作为定量分析指标也是后续的研究内容。