体操器械支撑座感知判断的变形预测研究
2022-05-19刘健欣
刘健欣
(1.平顶山学院,河南 平顶山 467000;2.河南大学,河南 开封 475001)
1 引言
体操是一种美与力量相结合的运动形式,体操动作中既有动态动作,也有静态动作。基础体操是一种动作和技术都比较简单的体操,其主要目的、任务是提高身体素质,培养良好的姿势,主要面向广大人民群众,最常见的是广播体操和健身体操,以防治各种职业病。从字面上讲,竞技体操是指在比赛中为了取胜,取得优异成绩,以获得奖牌为主要目的的一种体操。这种体操动作难度大,技术复杂,具有一定的危险性。1984年,艺术体操被列为正式比赛。体育是中国竞技体育的传统优势,在国际体育界处于领先地位,是实现“奥运辉煌”的重要体育项目之一。几十年来,中国竞技体操在世界比赛中取得了巨大成就,提高了国际声誉[1]。体育锻炼往往使人体在一定高度的器械或空间内完成一个不寻常的动作,训练辅助器材是指除与器械比赛外,在平时训练中使用大量的训练器材。使用大量的辅助器材,是体操不同于田径、球类等运动项目的显著特点。竞技体操项目,如双杠、吊环、平衡木、蹦床等,是随着体操技术动作的不断创新和物质科学技术的不断发展,从辅助训练设备发展而来的。今后将更加重视辅助训练设备的发展和创新。连接支撑座是体操训练辅助装置的基本组成部分之一,主要起到整体的支撑和保护作用。然而,由于体操运动员对辅助设备的压力过大,当受力过大时,撑杆容易变形。如果训练器材的轴承发生变形,训练器材的稳定性将大大降低,对运动员的训练工作将是一个隐患。
为最大限度地保证体操辅助训练器械支承座的稳定性,提出一种应力变形感知预测方法。当前国内外专家对相关器械变形预测方面进行了研究,文献[2]提出了基于装夹力监测的残余应力变形感知预测方法,建立了残余应力变形感知预测的数学模型,对感知预测过程进行了数学表述;提出了残余应力变形感知预测的实现步骤;搭建了残余应力变形感知预测试验平台,将叶片简化为薄板模型进行了残余应力变形感知预测试验,装夹卸载后残余应力变形感知预测值与实测值相比具有较好的一致性;文献[3]针对侧铣过程的变形分析,考虑到三维仿真模拟的时间成本比较高,将侧铣过程简化为二维有限元模型进行计算分析,基于简化的铣削模型研究了切削工艺参数对于残余应力的影响以及切削残余应力诱导的薄壁件加工变形,利用残余应力的有限元仿真结果,通过微元法和等效应变能预测得到变形量。但由于变形影响因子权重的不确定性,使得现有的应力变形感知预测方法具有预测灵敏度低、预测精度低等缺点。针对一系列预测问题,在传统方法的基础上进行了优化设计,提高了应力变形感知预测方法的精度和灵敏度,间接地为体操训练工作提供了更为稳定的辅助手段。
2 轴承联接支撑座应力变形感知预测模型设计
此次体操训练辅助器械轴承联接支撑座应力变形感知预测模型的运行原理,根据体操训练辅助器械的使用规律,对轴承联接支撑座的应力进行感知与预测,并计算支撑座的最大稳定系数。结合应力与变形的关系,得出应力变形感知的预测结果,并输出预测的应力变形量[3]。基于用户需求而自行设计的自定制应用程序,为用户提供了更加人性化的操作空间,可根据不同的功能需求,对模型进行更有针对性、更高级的设计与开发,在传统预测方法的基础上,优化设计的轴承联接支撑座应力变形感知预测模型框架,如图1所示。
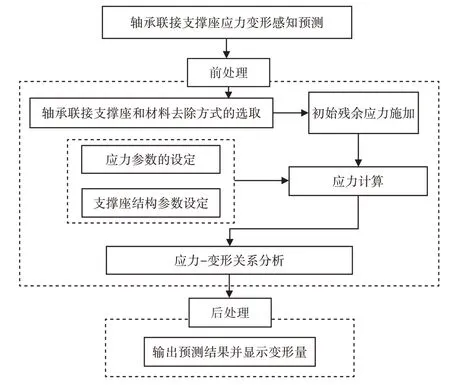
图1 轴承联接支撑座应力变形感知预测模型框图Fig.1 Block Diagram of Stress Deformation Perception Prediction Model of Bearing Joint Support
2.1 分析体操训练辅助器械轴承联接支撑座几何结构
辅助器械按训练目的和任务分类,根据目标和任务可将辅助器械分为防护辅助器械、诱导训练器械、素质训练器械、消除疲劳器械、测试诊断器械等5类[4]。在诱导式训练器、素质训练器和消除疲劳训练器中都涉及轴承连接支承座,针对这三种支承座进行了结构几何分析。采用Design Modeler 模块对支承座进行了三维结构子模型的建立。支撑座采用45°焊缝焊接,支承座厚度8mm,截面(208×208)mm,支承座长度为2000mm,T型钢开口为1196mm[5]。支架材料密度为7.85g/cm3,杨氏模量为200gpa,泊松比为0.3。在确定材料特性时,可以选择材料库中的结构钢。利用工作台自动网格化功能,相关系数设为80,深中心设置为精细,其他默认值,网格划分结果为78234个节点,34921个单元[6]。为了提高分析的精度,有必要对实际工况下的载荷和约束进行模拟,并对连接支撑座和支撑连接孔施加固定约束。另外,考虑到支座自重,对支座施加标准重力加速度。
2.2 确定应力变形感知点
采用模拟或理论分析的方法,预测了体操训练辅助器械支撑座结构工件可能的变形状态。这时可以简化工件的结构,残余应力的分布等,对变形趋势大致估计即可,对变形较大的部位施加感应点[7]。在考虑实际装夹条件下,将知觉点设置在10mm宽度的边缘,对零件支撑座的变形进行直观预测。
2.3 求解轴承联接支撑座应力
滚动轴承安装在转子部件上,使其与转子部件配合,使其与转子部件一起运动。滚动轴承发生故障后,转子总成脱落。滚动轴承的外圈首先与支承座分离器的一部分接触[8]。在摩擦力的作用下,带动支承座分体绕定位销在一个固定点上摆动,其他支承座分体通过环形接头同时绕各自的定位销摆动。在这一过程中,分别产生机械应力、热应力和残余应力。轴承和支撑座之间滑动接触的受力情况,如图2所示。
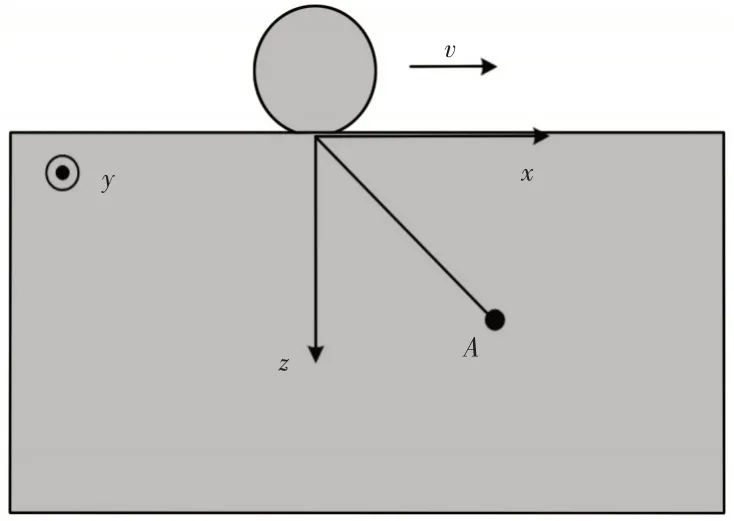
图2 轴承-支撑座之间滑动接触受力分析示意图Fig.2 Schematic Analysis of Sliding Contact Force Between Bearing and Support
假设窄带上分布式法向应力分布为p(s),切向应力分布为q(s),那么在辅助器械使用过程中,轴承联接支撑座内部任意一点A处由p(s)和q(s)引起的应力分量,可通过式(1)进行计算。
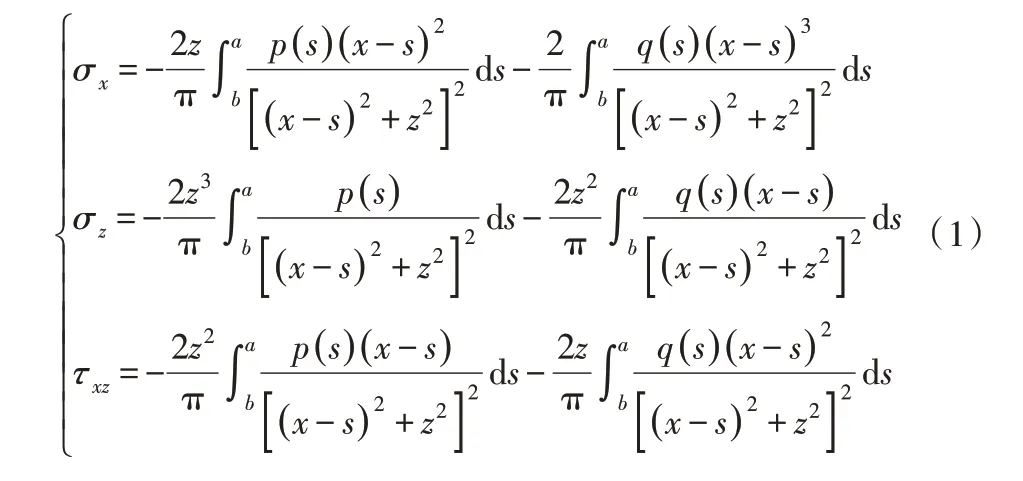
式中:a、b—受载区域的上下边界;
x、z—A点的x方向和z方向上的坐标;
s—y方向上的坐标距离[9]。
由于轴承的摩擦,支撑座上还会产生热应力,在已知支撑力温度的前提下,可预测出支撑座上任意一点的温度分布,进而可计算出热应力,具体的计算公式可以表示为:

式中:E—弹性模量;υ—泊松比;α—热扩散系数。
综合支撑力的弹性加载、弹性卸载以及应力松弛等因素可以得出轴承联接支撑座的残余应力[10]。通过轴承联接支撑座上各个位置上的应力计算结果,可以得出应力的分布情况,如图3所示。
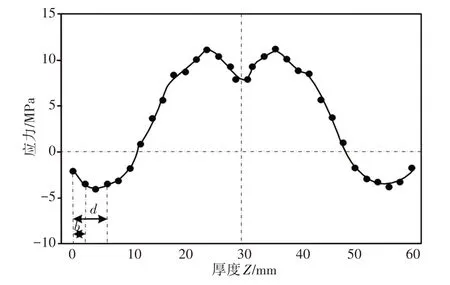
图3 轴承联接支撑座在Z方向上的应力分布曲线Fig.3 Stress Distribution Curve of Bearing Connecting Support in Z Direction
2.4 实现轴承联接支撑座应力变形感知预测
结合轴承联接支撑座应力分布关系,判断当前施加在体操训练辅助器械轴承联接支撑座上的应力是否大于轴承联接支撑座的稳定性极限值,若判断结果为肯定则证明轴承联接支撑座可能出现变形情况,否则感知预测结果为无应力变形。应力感知变形量综合了平面度、平行度和垂直度的计算结果,也就是从空间三维中的各个角度上进行变形量的计算,以累加的方式得出最终的应力变形量感知预测结果。将是否变形和变形量作为最终的预测结果输出。
3 预测性能测试实验分析
为了测试设计的体操训练辅助器械轴承联接支撑座应力变形感知预测模型是否实现了设计要求,设计性能测试实验,并从预测模型的灵敏度和精度两个方面进行具体测试和分析。
3.1 搭建应力变形感知预测模型运行环境
运动训练器材的使用过程是一个动态过程,支座连接处的应力变化较小,很难直接观察定量的试验结果,而各部位的变形和应力的有限元分析计算过程是一个求解的过程,如果直接通过操作来进行的话ABAQUS/CAE 要完成整个仿真过程,需要花费大量的时间,而且需要不断的人工干预,为了避免使用ABAQUS/CAE界面进行人工操作,节省了大量的时间和精力,提高了工作效率,因此,有必要对这一过程的仿真和数据处理进行控制Py⁃thon脚本语言。Python是一种具有面向对象解释能力的计算机编程语言。ABAQUS有限元程序通过集成脚本语言Python提供了大量的库函数,Python可以调用这些函数来完成建模、网格划分、指定材料属性、变形预测、分析结果后处理等操作。在上述实验环境下,利用这两种工具在计算机网络中实现了应力变形预测模型,预测界面,如图4所示。
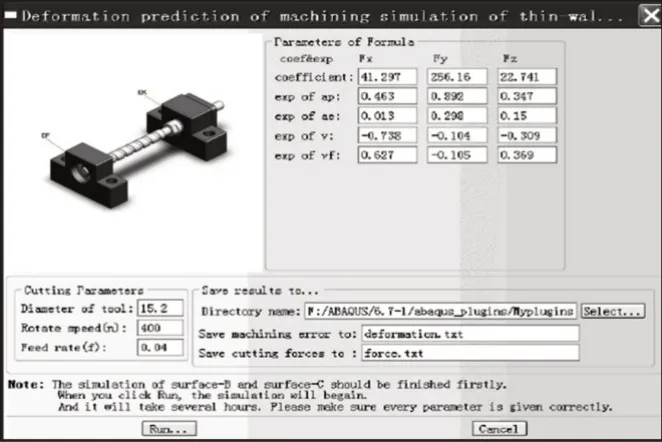
图4 支撑座应力变形感知预测模型运行界面Fig.4 Operating Interface of Stress Deformation Prediction Model of Support Seat
3.2 选择体操训练辅助器械轴承联接支撑座实验样本
选择竞技体操中所使用的单杠、双杠、跳马等辅助器械设备,并提取其内部的轴承联接支撑座作为实验样本。截取支撑座一小节,并将其网格化结果,如图5所示。
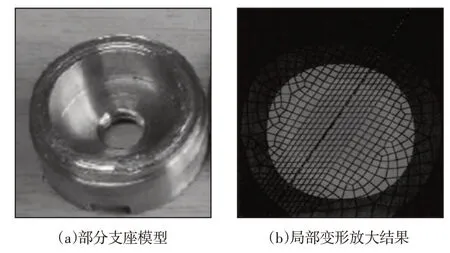
图5 支座部分网格化模型Fig.5 Partial Gridding Model of Support
3.3 设置应力数据与预测对比标准
随着时间的移动逐渐增加轴承联接支撑座上的应力,实验中采用的应力增加方式为程序控制方式,由此来保证应力增加速度和幅度的统一性和精准度。在不同的应力下,利用应力变形监测工具得出在不同的应力作用下,轴承联接支撑座的实际变形情况,并以此作为测试实验的对比标准。
3.4 描述测试对比指标与测试过程
根据体操训练辅助器械轴承联接支撑座应力变形感知预测模型的优化设计要求,分别设置灵敏度和精准度作为此次实验的两个测试指标,其中灵敏度通过预测模型的时间开销来体现,而预测的精准度通过变形量的预测误差表示。为了形成实验对比,除了设计的预测模型外,还设置文献[2]方法和文献[3]方法作为实验的两个对比方法。分别将两种对比方法导入到实验环境中得出预测方法的预测界面,并将实验样本数据导入到实验环境中。
3.5 预测性能测试对比结果
通过三种预测方法的运行,分别得出不同应力下变形感知的预测结果,将输出的预测结果与变形的监测结果数据进行比对,便可以得出有关于预测误差的对比结果,如图6所示。
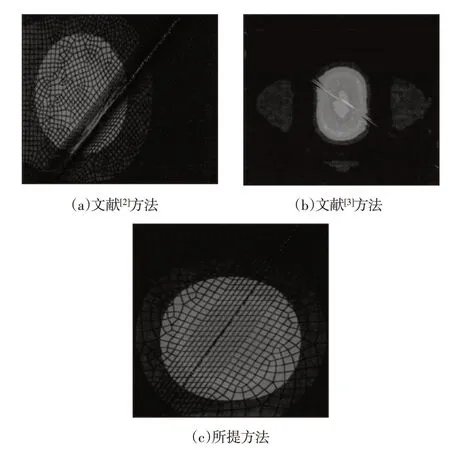
图6 应力变形感知预测精准度对比图Fig.6 Comparison of Prediction Accuracy of Stress Deformation Perception
从图6中可以看出,文献[2-3]方法提出变形预测方法在预测误差上无明显区别,但所提预测方法的预测误差明显低于两种对比方法。同时通过相关数据的调取与计算,可以得出预测灵敏度的对比结果,如表1所示。
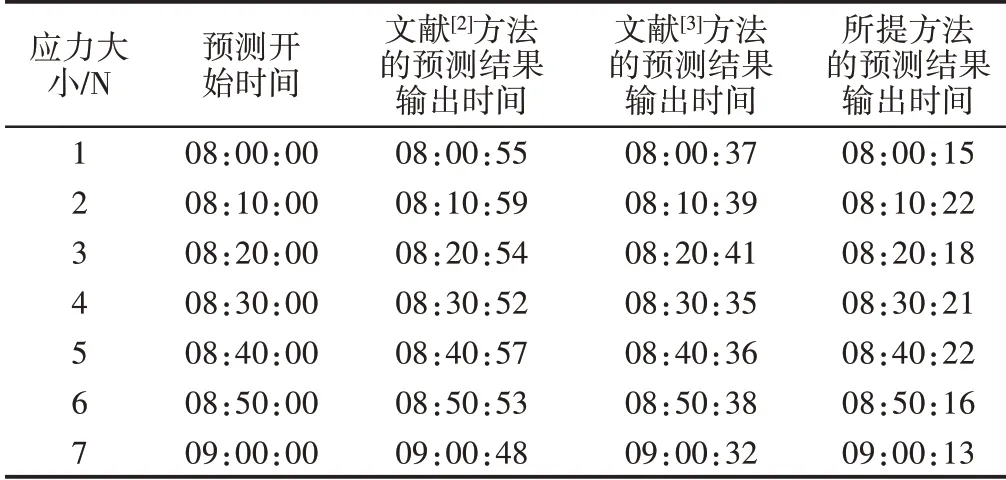
表1 预测灵敏度测试对比结果Tab.1 Comparison of Predictive Sensitivity Tests
从表1中的测试结果中可以看出,文献[2]方法、文献[3]方法的平均时间开销分别为54s和36.9s,而所提方法的平均时间开销为18.1s,由此可见所提方法的运行时间更短,即灵敏度更高。
4 结束语
通过体操训练辅助器械轴承联接支撑座应力变形感知预测模型的开发与应用,可以有效地预测出体操训练辅助器械的故障情况,及时对变形器械进行维修和处理,最大程度地保证体操运动员的训练安全。