汽车安全带带感系统动力学研究
2022-05-19赖泽豪杜群贵
赖泽豪,杜群贵
(华南理工大学机械与汽车工程学院,广东 广州 510640)
1 引言
安全、环保、节能已经成为当前汽车工业发展的三大主题[1]。安全带的使用大大降低了乘员在交通事故中的伤害程度,能有效提升整车的安全约束系统性能[2、3]。
卷收器作为安全带总成中的关键性能部件,在保证乘员生命安全方面起着十分重要的作用[4]。一款卷收器带感系统的基本结构,系统由内棘齿罩壳1、惯性块2、带敏棘爪3、带敏弹簧4、外棘齿盘5组成,如图1所示。外棘齿盘5安装在缠绕织带的卷筒上,当织带拉出加速度较小时,外棘齿盘5和惯性块2同步转动;当织带拉出加速度大于某个阈值时,惯性块2角速度小于外棘齿盘5,惯性块2与外棘齿盘5发生相对转动,惯性块2推动带敏棘爪3压缩带敏弹簧4同时带敏棘爪3与内棘齿罩壳1啮合,使外棘齿盘5的转动停止,带感系统完成锁止。由于安全带带感系统锁止过程中具有加速度大,运行时间短,织带行程小等特点,系统对于各个零部件之间的精度要求较高。越来越多的学者通过仿真分析以及建立数学模型等方法对带感系统进行动力学研究,文献[5]通过Adams 对某型安全带卷收器进行仿真分析,其分析结果直观但未能建立运动方程进一步分析;文献[6-8]分别建立了特定型号卷收器带感锁止系统的动力学模型,文献[6、7]在建模过程中忽略惯性部件的滞后效应,将其角速度与芯轴等同,文献[8]在建模过程中对弹簧压缩量的计算进行了较大的简化,导致动力学模型精度不够高。分析图1 形式安全带卷收器的工作原理,建立带感系统的力学模型以及动力学方程,分析外棘齿盘、惯性块以及带敏棘爪转角的关系,分析带敏弹簧刚度以及弹簧预压缩量对系统锁止加速度以及织带拉出量的影响,确定带感机构尺寸设计的合理范围,为提高安全带锁止性能的稳定性提供保证,为安全带卷收器的结构改进以及新产品开发提供理论依据以及指导。
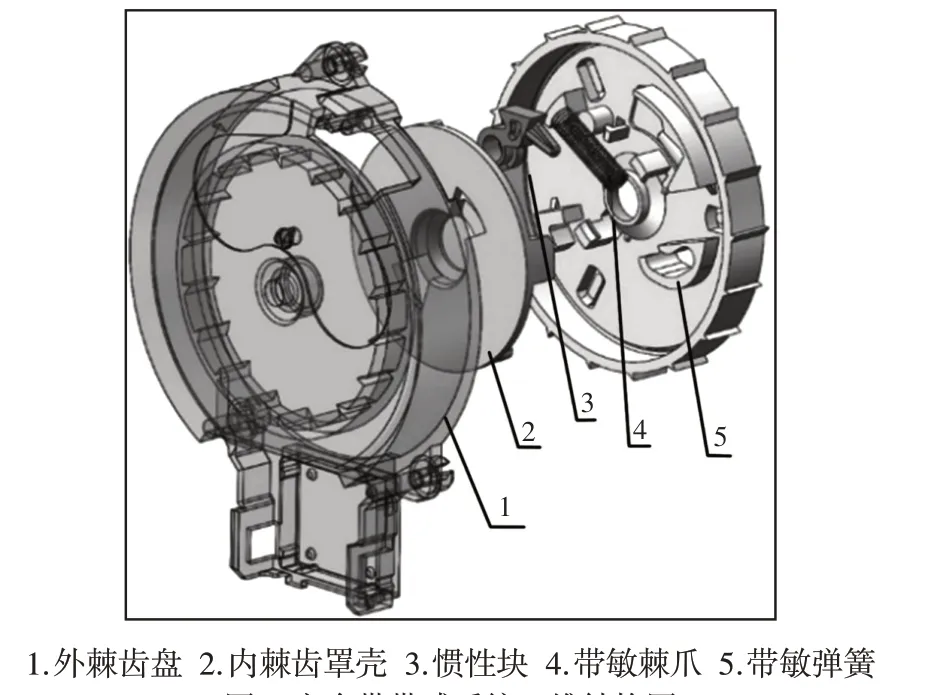
图1 安全带带感系统三维结构图Fig.1 Structure of Belt-Induction System in the Seat Belt
2 带感系统动力学分析
根据图1中带感系统各个零部件之间的运动关系,建立其等效力学模型,如图2所示。图中:θ1—外棘齿盘转动角度;θ2—惯性块转动角度;θ3—带敏棘爪转动角度;J1—惯性块转动惯量;L1—带敏棘爪转动轴心与惯性块相切接触点距离;L2—带敏棘爪转动轴心与带敏弹簧在棘爪上受力点距离;S—惯性块与带敏棘爪相切接触点到惯性块轴心距离;x0—弹簧初始压缩量;k—弹簧刚度;h(t)—带敏棘爪对弹簧压缩量。

图2 安全带带感系统运动结构等效力学图Fig.2 Equivalent Mechanical Model of Belt-Induction System
对于外棘齿盘,其安装在卷筒芯轴端面,与卷筒芯轴同步转动;建立外棘齿盘的运动方程,式中:a—织带拉出线加速度;R—卷筒缠绕织带后半径;卷收器锁止过程中织带拉出量较小,假设半径R在织带拉出过程中保持不变,则:

分析实际工况可知,当t=0,有θ1=0,θ1=0,由此得C1=0,C2=0;则外棘齿盘的转动角度表达式为:

惯性块以及带敏棘爪安装在外棘齿盘上,惯性块与外棘齿盘同轴同向转动,由于带敏弹簧的预压缩带来的弹力作用,惯性块与带敏棘爪保持相切线接触,当惯性块转动速度滞后于外棘齿盘时,惯性块推动带敏棘爪转动并压缩弹簧,最终棘爪与内棘齿罩壳啮合锁止;根据动量矩定理,建立惯性块的运动微分方程如下:
式中:L2θ3—惯性块推动带敏棘爪对带敏弹簧的压缩量。
当惯性块与外棘齿盘产生相对转动角度γ时,惯性块推动带敏棘爪转过角度θ3。建立惯性块与带敏棘爪的运动学等效机构原理图,如图3所示。将惯性块简化为导杆机构,棘爪简化为曲柄机构;建立两者关系式,式中:e—棘爪与惯性块轴心距离;φ1—棘爪与x轴夹角;φ2—惯性块与x轴夹角。可得:


图3 惯性块与带敏棘爪的运动学等效原理图Fig.3 Equivalent Mechanical Model of Inertial Disk and Pawl
由此可得:

将方程(6)代入惯性块运动微分方程式(3)求解θ2的表达式,通过分析得知无法得到解析解;为了得到解析解以便分析带感系统中带敏弹簧的刚度k、弹簧初始压缩量x0等主要结构参数对系统锁止性能的影响,需要对方程(6)进行一定程度的近似简化。
如图4 所示,将式(6)拟合为一条直线,其表达式为:φ1=3.882φ2-3.7105,其拟合方差为5.25×10-6,满足精度要求。

图4 φ1、φ2函数关系曲线图Fig.4 Graph of φ1、φ2
由此可得:

至此,得到惯性块的运动学微分方程为:

带敏棘爪与内棘齿罩壳锁止后,卷筒继续转动,推动锁止块与卷收器框架啮合锁止,此时安全带卷收器完全锁止完成。带敏棘爪锁止时卷筒的转动角度为θ1,锁止块锁止过程卷筒转动角度为α,卷收器锁止时织带总拉出量为L,带敏棘爪锁止时织带拉出量为l1,锁止块锁止过程中织带拉出量为l2,即有:

GB 14166-2013对于带感系统的功能要求为[9]:当织带在拉出方向上加速度值<0.8g时,卷收器不应锁止;当加速度值>2.0g时,卷收器必须锁止,织带拉出量≤50mm。由于卷筒上缠绕织带存在间隙,同时织带延伸率在(10~15)%之间,因此设置10mm的安全余量,则有:

3 实例分析求解
运用所推导的动力学方程,对一款卷收器的带感系统进行锁止性能分析。已知γ=3°,α=30°,g=9.81m/s2。带感系统主要结构参数,如表1所示。

表1 带感系统结构参数Tab.1 Structural Parameters of Belt-Induction System
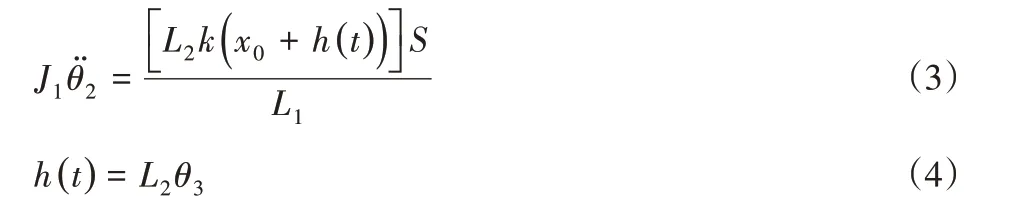
将参数代入式(2)和式(8)中,利用Matlab计算θ1,θ2数值大小。同时,以时间t为x轴坐标,加速度a为y轴坐标,各个转动角度θ1,θ2以及滞后角度γ为z轴坐标,在Matlab绘制三维曲面图形。由图5 可知,当加速度为0.8g ≤a≤0.91g 时,外棘齿盘与惯性块转动角度θ1,θ2相等,则外棘齿盘与惯性块未发生相对转动。当加速度a≥0.91g时,外棘齿盘θ1大于惯性块转动角度θ2,外棘齿盘与惯性块开始发生相对转动。由图6可知,当γ≥3°时,带敏棘爪与内棘齿罩壳完全锁止,此时织带的最小加速度a=1.0871g,带感系统锁止耗时t=0.053s;卷收器完全锁止总耗时为t=0.069s,则织带总拉出量S=25.384mm。
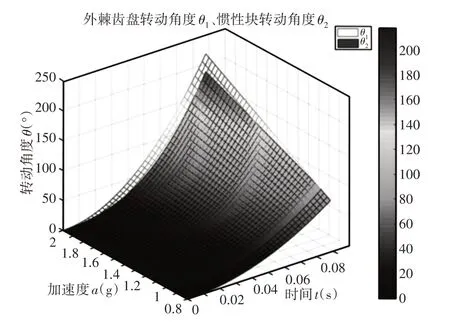
图5 θ1、θ2随加速度、时间变化曲面图Fig.5 Surface Map of θ1、θ2
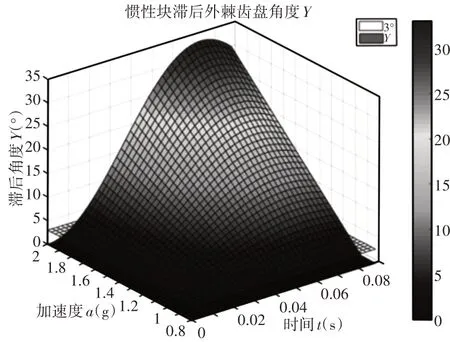
图6 滞后角γ随加速度、时间变化曲面图Fig.6 Surface Map of Lag Angle γ
分析惯性块的动力学方程可知,带敏弹簧刚度k以及弹簧的初始压缩量x0对带感系统的锁止性能具有较大影响,在Matlab分别计算不同刚度k以及压缩量x0下,带感系统的加速度以及锁止时织带拉出量大小,并绘制相应曲线。由图7可知,当弹簧刚度越大时,带感系统的锁止加速度越大,而锁止织带拉出量在(25~30)mm 之间变化,整体呈增长趋势。当带敏弹簧刚度k≤4.64N/m 时,系统锁止加速度a≤0.8g;当带敏弹簧刚度k≥11.61N/m时,锁止加速度a≥2.0g;根据国标GB 14166-2013中对带感系统要求,确定带敏弹簧刚度的设计取值范围:4.64N/m ≤k≤11.61N/m。由图8可知,当带敏弹簧预压缩长度在4.45mm ≤x0≤11.77mm 时,系统的锁止加速度以及织带拉出量符合GB 14166-2013中对带感系统要求。

图7 弹簧刚度与锁止加速度、织带拉出量关系图Fig.7 Relation Chart of Spring Stiffness,Locking Acceleration and Ribbon Pull-out

图8 弹簧预压量与锁止加速度、织带拉出量关系图Fig.8 Relation Chart of Spring Pre-Compression,Locking Acceleration and Ribbon Pull-out
由此可知,在安全带的开发设计以及生产制造过程中,带感机构内部核心运动部件的尺寸公差设计以及质量控制,对卷收器带感系统的锁止性能稳定性具有较大影响;确定核心部件的参数设计范围,不仅可以保证卷收器锁止性能符合国标要求,同时可以提高锁止过程的可靠性。
4 实验验证
利用实验设备,对该款产品进行锁止性能测试实验。本试验台主要用于测试卷收器锁止时的加速度大小、锁止过程耗时以及锁止过程织带总拉出量,如图9所示。首先将卷收器总成准确安装在规定的位置,通过电机驱动拉出织带,在极短的时间内达到实验预设的加速度值,并保持该加速度值不变拉出织带,若卷收器在织带拉出量小于50mm 范围内锁止,设备自动记录实验结果;否则,系统自动增加加速度值,继续实验。

图9 卷收器锁止性能测试机Fig.9 Test Equipment of Retractor Lock Performance
将卷收器正确安装后,设置实验的初始加速度值为0.8g,加速度峰值为2.0g,加速度增量为0.1g。若实验过程中某一加速度值3次试验结果均满足国标要求,则该加速度值为带感系统的最小锁止加速度。测试结果,如图10所示。图中实线表示卷收器的织带拉出加速度随时间变化的曲线,虚线表示织带拉出量随时间变化的曲线。可知,本款卷收器的锁止耗时为70.38ms,锁止加速度为1.1g,织带拉出量为26.84mm,满足GB 14166-2013 对带感系统的锁止性能设计要求。通过试验结果和理论模型计算对比,带感锁止加速度相对误差为1.17%,织带拉出量相对误差为5.42%。所建立的动力学模型求解结果与实验结果误差在可接受范围内,证明了模型的正确性。

图10 带感锁止系统性能测试结果Fig.10 Test Results of the Belt-Induction Locking System
5 结论
通过建立带感系统的动力学模型。对实例模型进行分析,分析卷收器带感系统的锁止时间以及锁止时织带拉出量与织带拉出加速度的关系,确定核心部件的尺寸参数设计范围。最后,通过试验验证了动力学模型的正确性,其结果同时满足国标要求。所建立的带感锁止系统的动力学模型,对探索和设计车内人体安全约束系统和整车碰撞分析工作具有极大的意义;对工程人员进行产品结构改进以及产品开发具有重要的指导作用,有利于优化设计安全带锁止系统的结构以及进一步地完善汽车安全约束系统。