专用高压环网柜分合闸智能机械臂设计初探
2022-05-18覃事文肖雨嫣黄里李泽文黄亮
覃事文,肖雨嫣,黄里,李泽文,黄亮
(1.国网湖南省电力公司常德供电分公司,湖南 常德 415001;2.长沙理工大学电气与信息工程学院,湖南 长沙 410114)
1 前言
随着用户对供电可靠性的要求越来越高,如何减少用户停电成为电力公司亟待解决的问题。合环倒负荷以及故障时,非故障区域快速恢复用电是减少用户停电较为有效的措施。环网柜是一组装在绝缘柜体内或做成间隔式环网供电单元的输配电电气设备(高压开关设备)。现有的微机环网柜保护装置具有三段式过流保护、零序保护等常规保护功能;由于环网柜内部由PT、CT、断路器等多种元件组成,任何一个元件发生老化或者绝缘破坏,均可能发生事故。如负荷侧有相间短路现象,短路电流瞬时可以达到几千安培;如断路器质量不过关,合闸时断路器会爆炸;如PT绝缘破坏,质量不好的PT也会发生爆炸,其爆炸产生的能量巨大,足以破坏整个开关柜,存在人身安全隐患。国内外为解决环网柜维护和作业过程中操作安全问题,设计带有双关节机械手的配电环网柜电气操作机器人和“一键式顺控”自动控制系统等,但其造价太高,不利于携带,没有广泛应用。
某供电公司目前具有226个环网柜,但受限于环网柜无法进行一次核相,且人工合环操作存在环网柜爆炸、人员伤亡的危险性,运维人员不敢就地操作,同时,操作复杂、时间长导致用户停电时间过长,故环网柜合环未大面积推广。为此,本文针对高压环网柜人工分合闸操作难度大、危险性高等问题,研究了一种远程控制的双臂机械臂。
2 机械臂机械设计
双臂机械臂机械部分的结构主要包括左侧单轴机械臂、右侧二轴机械臂以及下方固定支撑支架,可拆卸操作头在步进电机的驱动下执行相应的操作任务。
2.1 整体设计
考虑到转动环网柜不同的开关所需力矩不同,本文设计了拥有两个可拆卸操作头双臂机械臂。设计指标(表1)与整体设计图(图1)。

表1 机械臂设计指标
机械臂的整体设计,如图1所示。1为支撑三脚架固定夹,2为支撑三脚架,3为控制中心盒,4为步进电机及减速器,5、7为可拆卸操作头1、2,6为二轴机械臂副臂旋转关节,8为二轴机械臂副臂,9为二轴机械臂主臂,10为二轴机械臂主臂旋转关节,11为电机滑轨。针对被转动所需力矩不同的环网柜开关旋钮,可选择不同的操作头。
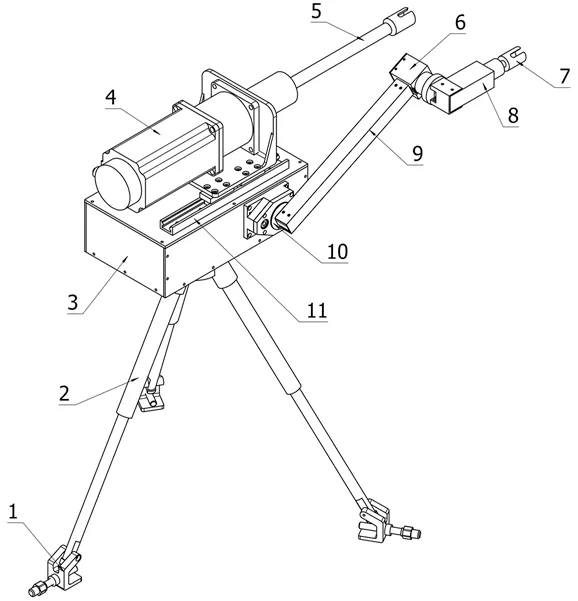
图1 机械臂整体设计
2.2 电机选型
2.2.1 单轴机械臂步进电机
可拆卸操作头1直接连接在步进电机输出轴上,在电源的牵引下来转动所需力矩较大的环网柜分合闸开关旋钮。
可拆卸操作头1在运动中,转矩为:

式中,G为旋转轴受力大小,L为质心到旋转轴的距离。
经现场测量,某公司高压环网柜分合闸按钮距可拆卸操作头1中心位置为L1= 400mm 。在转动时所需最小力为Fmin1= 150N 。所以进步电机需要提供的最小力矩为T1= 0.4× 250 = 100N⋅m ,考虑到电机传动效率约为η=86%,得步进电机的额定输出转矩为TN1= 116.28N⋅ m 。
通过以上计算得出的正常工作转矩及电机额定输出转矩,根据《中小型电机选型手册》选取步进电机的型号为110HSE20N,其额定静力距为20N·m,额定相电压为220V,额定相电流为4A,重量为11kg。并选取型号为3HSS2208H-110的驱动器和减速比为1:10精密行星减速器。
2.2.2 副臂首端减速步进电机
机械臂的副臂作为操作头与主臂的连接部分,是改变末端操作头运动轨迹的关键部位。副臂在空间中进行俯仰运动,显著提高末端操作头在空间中的运动能力,使操作更加灵活精确。考虑到其承载能力、刚度和重量,采用了铝合金作为加工材料,机械手副臂剖面图如图2。
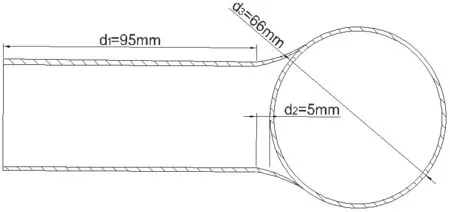
图2 二轴机械臂副臂
副臂质量Mvice为300g,副臂长度为dvice为166mm;副臂质心距离副臂末端电机输出轴的距离Lvice为145mm,根据转动惯量公式,以及平行轴定理公式:

可得:副臂转动所需最小转动惯量Jvice−min为 0.015 kg⋅m2,取副臂转速wvice为90°/s,加速时间tvice为0.2s,由转矩公式。

可得:副臂转动时所需最小转矩Tvice−min为0.0188N⋅m。
考虑机械手臂各部分摩擦以及重心轴的转动惯量,取安全系数为2。在考虑安全系数后,副臂转动时所需最小转矩为0.375N⋅m。考虑到整个机械臂的工作范围,当副臂与地面平行时,操作头扭转开关时的负载转矩最大,此时,操作头质心到副臂转动轴之间的最大距离约为295mm,扭转开关所需要的力约为5N,由公式(1)得扭转分合闸开关需要的转矩Tvice−G为1.47N⋅m。
2.2.3 主臂首端减速步进电机
主臂作为机械臂中位移和所受扭矩最大的部分,在保障机械臂运动的平稳性的基础上对其所受力矩进行严格计算。副臂的旋转关节位于主臂的末端,因此,主臂末端需要承受副臂所有力矩以及副臂末端电机自身重量导致的力矩。主臂剖面图如图3所示。
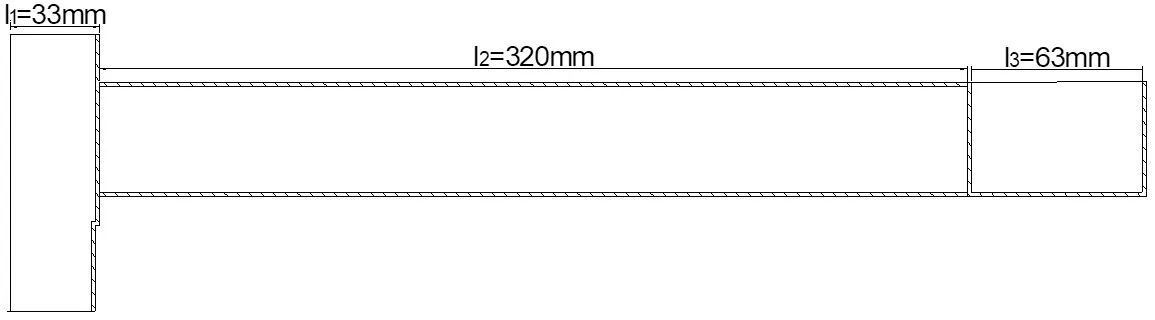
图3 二轴机械臂主臂
同上,当主臂和副臂位于同一条直线且水平与地面时,转矩和转动惯量最大。主臂与副臂末端电机的质量和Mmian为1500g,主臂长度为dmain为416mm,主臂质心距离主臂末端电机输出轴的距离Lmain为215mm。取主臂转速wmain为90°/s,由式(2)、(3)得使主臂转动的最小惯量为Jmain−min为 0.329kg⋅m2。取主臂加速时间tmain为0.2s,得主臂转动时所需最小力矩Tmain−min为0.411N⋅m。考虑机械手臂各部分摩擦以及重心轴的转动惯量,取安全系数为2,在考虑安全系数后,主臂转动时所需最小转矩Tm′ain−min为0.822N⋅m。
当主臂与地面水平时,操作头旋转开关时的转矩最大,此时操作头质心到主臂转动轴之间的距离最大约为565mm,扭转开关所需要的力约为5N,由公式(1)得扭转分合闸开关带来的转矩Tmain−G为2.7865N⋅m。
通过以上计算得出的主臂转动时所需最小转矩Tm′ain−min以及扭转分合闸开关带来的转矩Tmain−G,根据《中小型电机选型手册》选取微型行星减速步进电机型号为:35HSH24G51J-150。其相电压为24V,扭矩为6N•m,转速为15r/min,重量为0.35kg。
2.3 底座
综合考虑机械臂的作业高度、承重性能、稳定性、可携带性等要求,选取思锐碳钎维R5214X型三脚架为底座。三脚架采用10X碳钎材质,伸缩高度为0.58~1.6m,安全承重30kg。
3 二轴机械臂运动学与动力学分析
本章将建立一个二轴机械臂的运动控制模型,为控制机械臂的精密旋转角度提供基础。机械臂的模型包括运动学模型和动力学模型,研究机械臂运动学是为了分析机械臂末端操作头和环网柜开关按钮之间的空间位置关系。正运动学主要分析给定力矩或力的大小,求每个关节的运动轨迹;逆运动学分析已知每个关节的运动角度,求末端的力或力矩。而动力学模型主要分析动力学方程和各力矩阵之间的关系。
3.1 运动学分析
3.1.1 二轴机械臂正运动学分析
图4为提出的二轴机械臂模型,其手臂长度分别为L1和L2,关节角度分别为θ1和θ2,关节端点位置为(x,y),关节末端位置为:

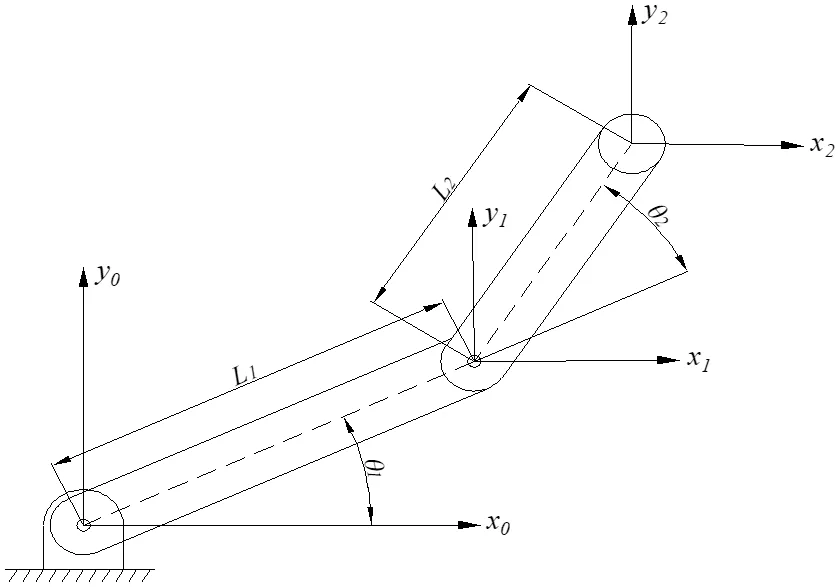
图4 二轴机械臂模型
3.1.2 二轴机械臂逆运动学求解
二轴机械臂在工作状态时具有一定的工作区域,如图5所示的二轴机械臂,其工作区域在圆弧1与圆弧2之间的区域,即机械臂的关节端点位置(x,y)位于外半径L1+L2与内半径L1−L2间。
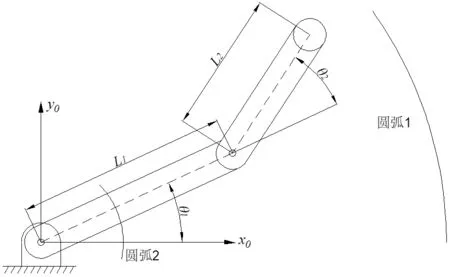
图5 二轴机械臂逆运动模型
利用D-H法建立二轴机械臂数学模型:
表3中,iθ为手臂夹角,iβ为手臂偏移量,iα为手臂长度,jα为手臂扭角。

表3 二轴机械臂的D-H参数
两机械臂间的齐次坐标变换矩阵:


即:
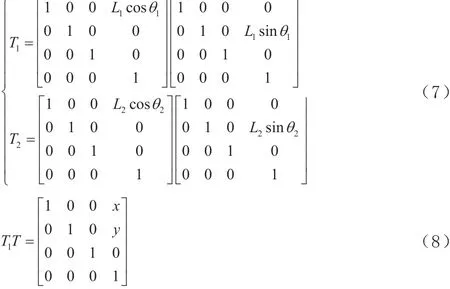
机械臂末端的位置矩阵:T=T1T2,则
得:

即:

又由式(1)得:

即可求得1θ和2θ的值。
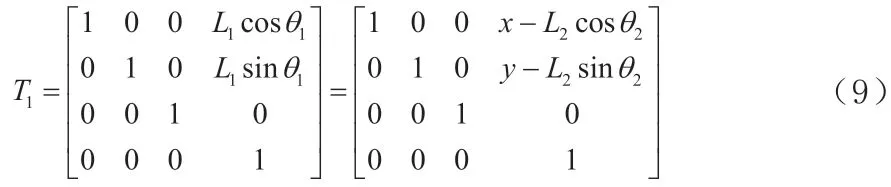
3.2 二轴机械臂动力学分析
通过拉格朗日法,对二轴机械臂的动力学模型进行建立。
如图6所示,1θ和2θ为手臂1和手臂2的关节变量角位移,1m和2m分别为质量,1τ和2τ分别为力矩,1L和2L分别为臂长,1c和c2为手臂质心,与铰接点的距离分别为d1和d2。
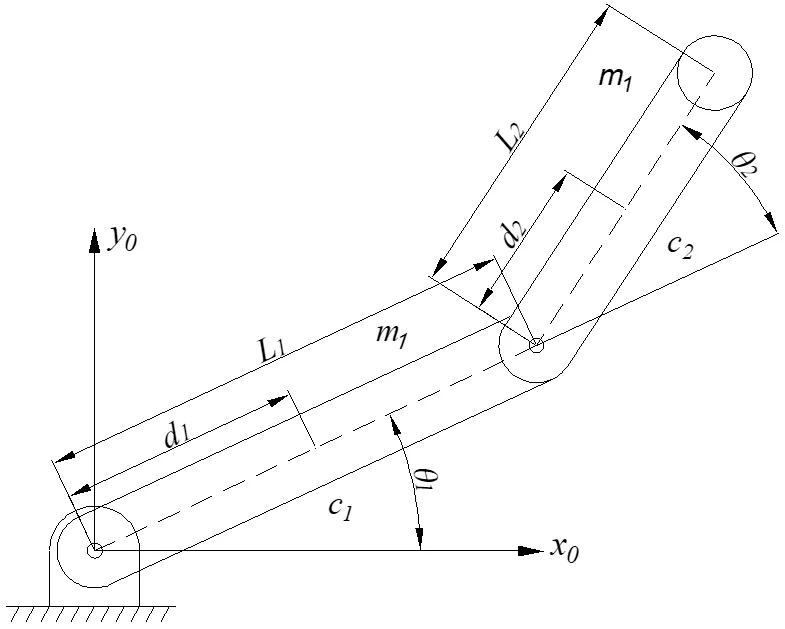
图6 二轴机械臂运动模型
拉格朗日方程为:

式中,L为系统的动能与势能差,qi第i个关节的广义坐标,iq˙为第i个关节的广义坐标对时间的一阶导数;
由此可得机械臂的动力学方程为:

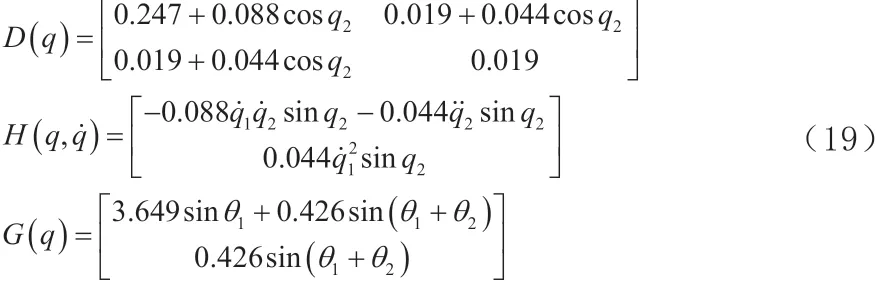
式中,D(q)为惯性矩阵,H(q,q˙)为向心力和哥氏力矩阵,G(q)为重力项矩阵,

计算动力学方程的系数矩阵,令转动惯量:

则:

将表1与表2中的参数代入式(14)~(18)中,可得二轴机械臂的动力学方程系数矩阵为:
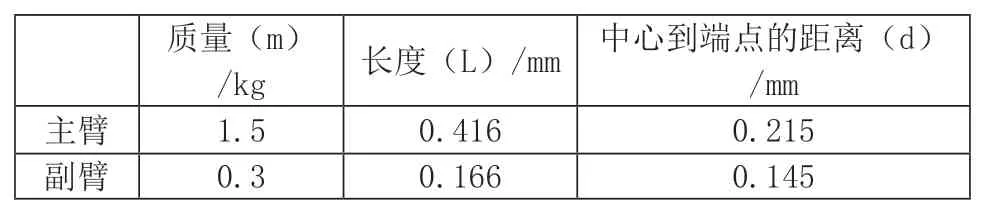
表2 二轴机械臂的参数
4 机械臂控制系统
机械臂控制系统总体结构框图如图7所示。
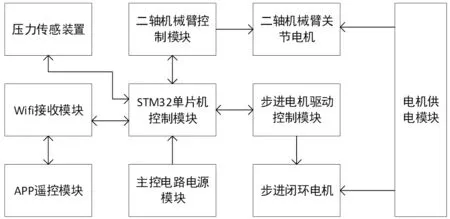
图7 控制流程图
图7为机械臂控制流程图。控制系统主要由基于模糊PID算法的STM32单片机控制模块、Wifi通信模块、压力传感模块、电机驱动模块和供电模块组成。单轴机械臂电机由独立的电机驱动器控制,经Wifi通信模块接收单片机控制器的目标指令完成开关柜的分合闸。主控单元通过Wifi通信模块接收APP给定指令,对二轴机械臂发出指令,执行相应的分合闸任务;对电机驱动控制器下发运动控制指令及电机运动参数采集并将参数上传给APP;安装在电机输出轴上的压力传感器实时反映操作头的受力情况,控制电机转动。
4.1 模糊PID控制原理
在工业中,PID控制因为结构简洁、控制器设计简单、参数方便调整、稳定性好等优点,成为热门的单片机控制技术。PID控制系统原理如图8所示。
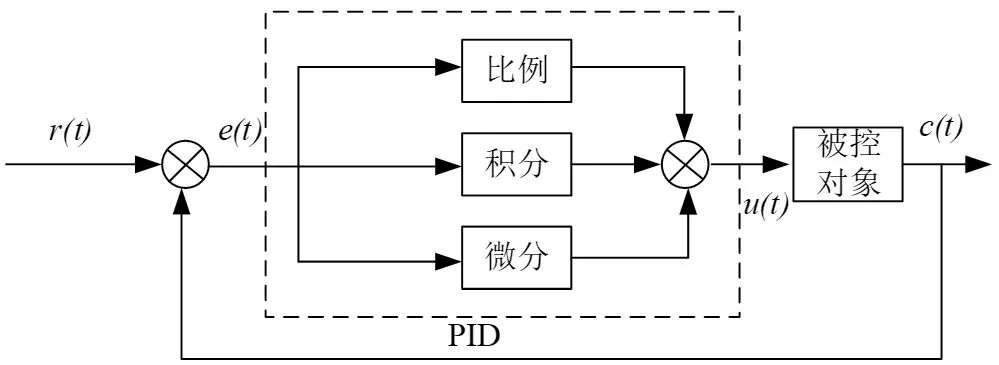
图8 PID控制系统原理图
KP、TI、TD是PID控制器三个最重要的参数,输入二轴机械臂各关节末端给定的位置信号r(t)和实际输出信号c(t)的差值e(t),将差值依照公式(21)的形式进行线性组合,输入给被控对象。本文中位置信号r(t)可由式(19)二轴机械臂的动力学方程系数矩阵求得。
在上式中,Kp为比例系数,TD为微分时间常数,TI为积分时间常数。PID控制器各环节的功能如下:
(1)比例环节P:比例放大差值e(t),当系统有较大偏差时,控制器会发挥作用以减小系统偏差。
(2)积分环节I:对控制器的输出变化速度与输入误差e(t)进行调节。TI是积分时间常数,其值越小,系统越稳定。
(3)微分环节D:控制器的输出与误差时间成反比。为防止误差突然出现变化,系统通过提前预判其变化趋势来引入一个修正量,从而减小误差。
4.2 单片机控制模块设计
机械臂控制系包括下位机底层控制软件和上位机遥控软件。
下位机底层控制软件是利用单片机与Wifi接收模块相结合进行机械臂驱动电机的无线遥控,单片机控制模块能够控制电机输出指定的转角是在单片机产生基本的 PWM周期信号(20ms)的基础上调节 PWM 信号的占空比来调节脉宽。现有的STM32单片机能输出脉冲宽度为微秒级的PWM信号,使电机的转角精度在1°以内。本设计利用模糊PID控制算法,将计算结果转化为PWM信号输出到电机。
4.3 APP遥控模块设计
基于IntelliJ IDEA 的Android Studio具有强大的移动端软件开发能力。Android Studio Canary是一个在网页上就能进行操作的可视化安卓应用程序制作平台,组件设计和逻辑设计都十分方便,入门门槛较低,其应用领域也十分广阔。
上位机遥控软件为控制端手机APP软件,论文中机械臂控制端APP是在Android Studio Canary平台上制作,对机械臂发送正转、反转、停止等相关指令功能来遥控智能机械臂。APP界面如图9所示。

图9 APP控制界面
4.4 压力传感模块设计
利用集成电路技术和半导体材料单晶硅的压阻效应制成的电桥形压阻式传感器,具有灵敏性高、测量范围广且价格便宜的特点。单晶硅材料可直接作为测量传感元件,在收到外界压力后单晶硅会发生形变,从而使其电阻率发生变化,导致电桥的输出出现不平衡量。直接测量电路输出信号后得到一组和压力成正比关系的变化的电流和电压信号。压阻式传感器目前被广泛用于压力、拉力和速度等物理量的测量和控制。
本设计选用固态压阻式压力传感器安装在电机输出轴一端的联轴器上。当环网柜分合闸成功后,压力传感器感应到压力骤降,迅速反馈给单片机控制单元,控制电机停止转动。
5 结语
智能机械在电力行业的应用越来越广泛,前有巡线无人机,后到智能分合闸机械臂。本设计为解决某供电公司高压环网柜人工分合闸存在安全隐患,设计一款可伸缩携带的智能机械臂进行分合闸。首先,设计机械臂的机械部分,通过计算机械臂受力力矩选取合适的驱动电机和底座。其次,对机械臂的运动学进行了研究,推导出了正运动学方程,再利用D-H法建立二自由度机械臂数学模型,进行了逆运动学分析。选用拉格朗日法建立机械臂动力学方程,并求解势能及动能。利用模糊PID算法,实现单片机对电机驱动装置的控制。最后,开发了 一款手机APP对智能机械臂进行远程无线遥控。该智能机械臂满足便于携带、可安装在环网柜面板上、操作空间大、应用环境多样、操作便捷、具有多种拆卸操作头等要求,为高压环网柜分合闸提供了便利。
