基于TOA 算法的超声波定位节点布局研究
2022-05-18张兴红张志忠孙冰曼
张兴红,陈 然,张志忠,孙冰曼,徐 翊
(重庆理工大学 两江国际学院,重庆 401135)
0 引言
随着信息技术的飞速发展,室内定位技术的需求不断增加。超声波定位技术具有传播速度低、分辨率高、抗干扰能力强、传感器体积小、定位系统易集成化和小型化等优点,因此超声波定位技术是室内定位常用的技术[1]。而且超声波本身是一种频率高于20 kHz 的声波,其方向性好、穿透能力强的特点决定了超声波定位是一种高效的非视距、非接触式定位技术[2]。室内定位的广泛应用前景使得对室内定位的研究一直在进行,综合已有的研究,发现对于超声波接收器布局结构的研究较为空白。因此,提出了2 种快速布局的超声波接收器布局方案,通过固定的布局,简化计算,无需处理盲区,避免了一更换场景就需要重新设计布局方案的繁琐,使得超声波定位系统的安置速度进一步提高。
1 超声波定位原理
1.1 超声波测距原理
在超声波定位系统中,发射端会根据预定程序或按照有规律的时间将超声波信号发射到周围。本文采用超声波发射端放置于待定位物体上的方案,如图1 所示。当定位系统启动时,超声波接收端会分别接收到来自发射端发射的超声波,利用超声波分别到达这些接收端的传输时间,再结合超声波速率和相应的定位算法即可计算出超声波发射端的具体位置[3]。
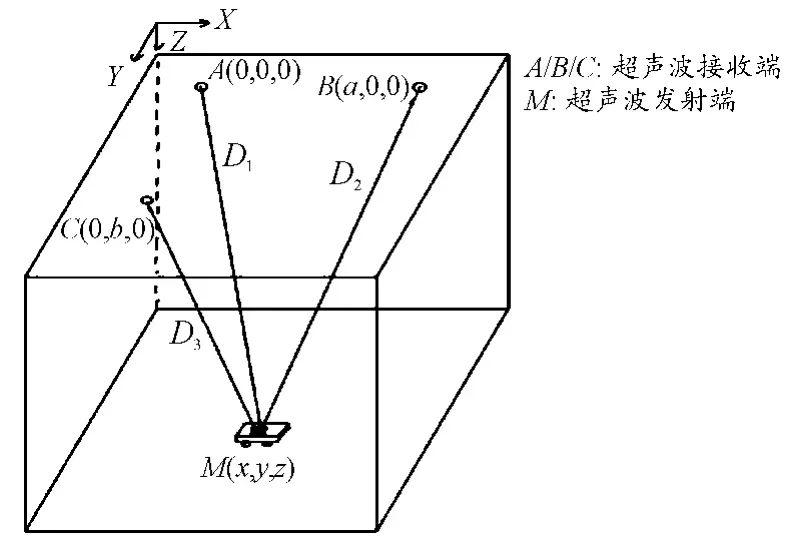
图1 超声波三维定位原理图
如果在定位系统中待定位物体处于移动状态时,那么通过持续的测量距离和位置解算就可以记录出目标物体的移动轨迹。设超声波在空气中的传播速度为C,搭载超声波发射端的待定位目标到每个超声波接收端的传播时间为Ti,则待定位目标物体到超声波接收端之间的距离如式(1)所示。

由于超声波在空气中的传播速度与温度相关,测量误差由超声波传输时间Ti和超声波在空气中的速度C 决定[4-5]。超声波的传播速度由式(2)表示。

式中:C0=331.45 m/s;T0=273.16 ℃;E 为环境温度。
1.2 超声波定位算法
采用TOA 定位算法,即时间到达算法,该算法是测量超声波发射端(待定位物体)发射超声波到各个超声波接收端(基站)所经过的时间,时间与超声波速度的乘积为待定位物体到各个基站的距离,当以各个超声波接收端为圆心,距离为半径作圆,2 个距离圆相交于两点,得到超声波发射端的2 个位置解,所以需要第3 个距离圆才能确定发射端的实际位置[6-7]。
为方便计算,假设XOY 平面是室内空间的天花板,超声波接收器布置在该平面上的位置分别为A(0,0,0)、B(a,0,0)、C(0,b,0),被定位物体M 位于地面,其空间坐标位置为M(x,y,z),则3个接收点至待定位物体M 的距离分别为D1、D2、D3。超声波三维定位原理图如图1 所示,由图中的空间几何关系可得式(3)。
解上述方程得:
可以通过式(3)解得T(x,y,z)坐标值,如式(4)所示,最终得到被定位目标M 的空间位置坐标。
在二维空间中的TOA 定位可看作三圆相交于一点的模型,如图2 所示。当超声波接收器和发射器的时间完全同步时,可测得待定位物体到达固定基站的准确时间,假设待定位物体的位置坐标为M(x,y),3 个接收端位置坐标为RSi(xi,yi),i=1,2,3,超声波信号的速度C 乘以TOA 测量时间得到3 个接收端到待定位物体的距离r1,r2,r3,根据几何关系可以计算得到待测物体的坐标。
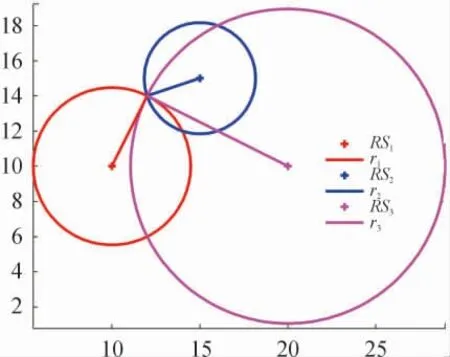
图2 TOA-二维示意图
通过TOA 算法实现二维定位,待定位物体的位置在3 个距离圆的交点处,则至少需要3 个超声波接收器(基站)才能实现定位,并且3 个接收器不能共线。通过以上TOA 原理可以看出,其中的时间参数均为系统中的绝对时间,也就是需要超声波收发端进行严格的时间同步,从而满足所有超声波接收端的参考时间为同一个时间点。
2 超声波接收端布局
因为超声波发射端是具有发射角的,因此存在最大覆盖范围。图3 显示了典型超声波发射端的覆盖区域,该区域可以通过以下参数来表示。θ:超声波接收端可以感知到的最大锥角。r:超声波发射端的最大覆盖范围圆的半径,超过该范围,目标将无法接收信号。R:超声波发射端的最大发射距离。h:超声波接收端与目标之间的垂直距离(高度)。
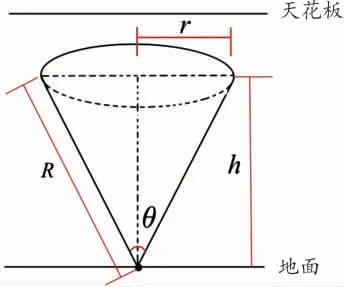
图3 超声波发射端覆盖范围
在确定超声波接收节点的位置时,需要遵循无论发射端在定位区域中任何位置移动时,都要确保其发射信号区域有3 个或3 个以上的超声波接收节点存在,这样才能确保定位系统正常工作。超声波接收节点的布置问题首先考虑如何确定一个布局结构,使其有较大的覆盖范围,同时仍要成本最小。而成本取决于系统中使用的超声波接收端数量。对于超声波接收端布局,通常布局的面积大于超声波发射端的发射范围,因此可以忽略边界效应。
通过以上对超声波定位系统接收节点设置数量和位置分布的分析,设定超声波发射器方向角θ,根据超声波接收节点位置布局策略,提出了基于正方形端点的接收节点布置方案,如图4 所示。这是利用了正方形可以在平面上平铺的特性,这样就保证了在任何平面都可以完全覆盖,没有测量盲区,同时也确定了快速布局的可能性。
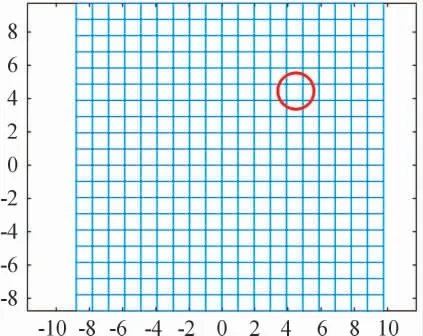
图4 基于正方形端点的布局
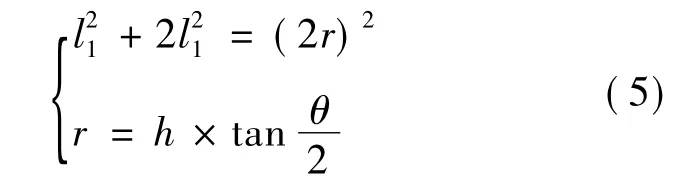
正方形边长是超声波发射端覆盖圆半径r 的函数,半径r 是高度h 和超声波发射端发射角θ 的函数,函数关系如式(5)所示。因此对于给定的设计区域,正方形边长越大,布局成本就越低。
从图4 可知基于正方形端点的超声波接收器布局的3 种情形,如图5 所示。
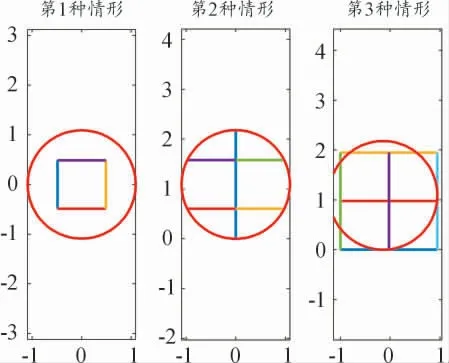
图5 基于正方形的3 种情形
假设实际布局空间的长为A、宽为B、高为h,S是天花板的面积。对于正方形布局方案,系统中所需的超声波接收节点数量是边长的函数,如式(6)— (8)所示。
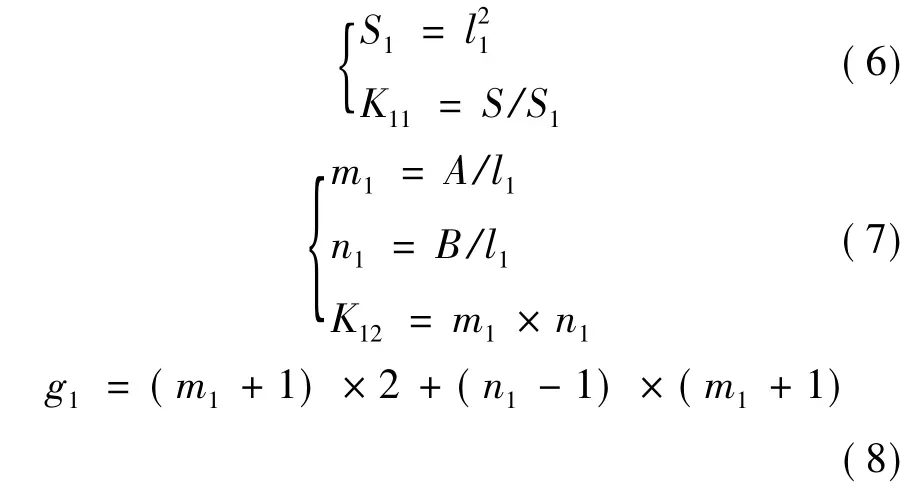
式中:S1是正方形的面积;K11是所需的正方形个数;m1是每一行的正方形个数;n1是每一列的正方形的个数;m1与n1的乘积K12用来验证K11。g1是超声波接收节点的个数,其计算示意图如图6所示,第1 行每增加1 个正方形,端点增加2 个,考虑第1 个正方形有4 个端点,如式(9)所示:
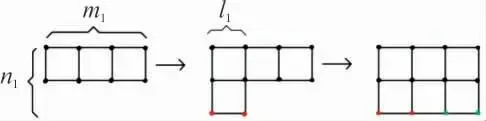
图6 基于正方形的超声波接收节点计算示意图

第2 行第1 个正方形端点增加2 个,后面每增加1 个正方形,端点增加1 个,考虑所有的列数再减去第1 列,如式(10)所示:

将式(10)化简得式(11):

通过计算确定了正方形的边长以及个数,既保证了布局的快捷性,也确定了在任何位置都有3个及3 个以上的超声波接收端接收发射信号。
基于正六边形端点的布局方案也是相似的情况,也需要遵循无论发射端在定位区域中任何位置移动时确保其发射信号区域有3 个或3 个以上的超声波接收节点存在,使其有较大的覆盖范围,同时也要成本最小,其布局方案如图7、8 所示。
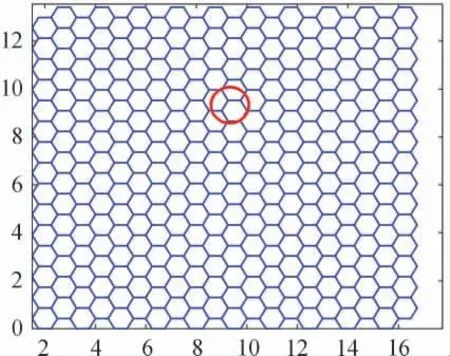
图7 基于正六边形端点的布局
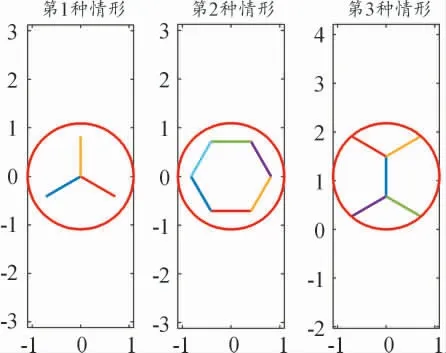
图8 基于正六边形的3 种情形
同样假设实际布局空间的长为A、宽为B、高为h,对于正六边形布局方案,正六边形边长l2与高度h 和超声波发射端发射角θ 的函数关系如式(12)所示。
系统中所需的超声波接收节点数量也是正六边形边长的函数,如图9 所示,其中参数a 和b 都是为计算其超声波接收节点数量而设定,如式(13)—(15)所示。
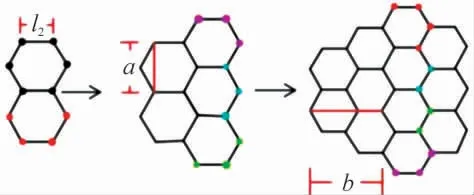
图9 基于正六边形的超声波接收节点计算示意图
式中:S2是根据正六边形几何关系得到的面积;K21是所需的正六边形个数;m2是每一行的正六边形个数;n2是每一列的正六边形的个数;K22用来验证K21;g2是超声波接收节点的个数。
在通过超声波发射角θ 计算出正方形或正六边形的边长后,以正方形或正六边形为基本单元,再通过实际空间平面的长和宽计算出空间平面长边需要几个基本单元,宽边需要几个基本单元,然后平铺覆盖整个定位空间平面,使得整个定位空间没有盲区,设第1 个基本单元的第1 个节点为原点,其余的节点只需要通过简单的几何关系计算即可得出坐标。所以,使用规则图形的超声波接收端布局,将可以大量节省计算的工作量,并允许快速部署设计合理的布局,特别是对于超声波节点布置面积较大的情况,在安装系统时,可以通过固定边长的正方形或者正六边形的端点来快速安装超声波接收节点。
3 仿真和实验
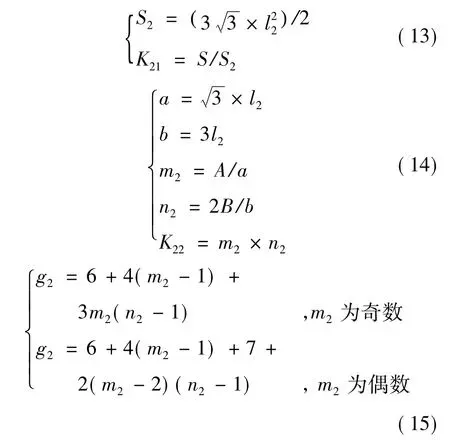
在通过对2 种布局方案的每一种情形进行计算后,得到2 种方案3 种情形下超声波接收端真实的位置坐标。再代入超声波接收端的真实位置到TOA 算法,对2 种布局方案进行仿真实验,设温度E 为20 ℃;通过测量方向角实验确定超声波发射端方向角θ 为40°,如图10 所示,测量数据如表1 所示,表中Inf 代表空集,实验数据表明在误差为毫米级的范围内,选择半角为20°,这样超声波发射端方向角θ 即为40°。
图10 超声波传感器方向角测量
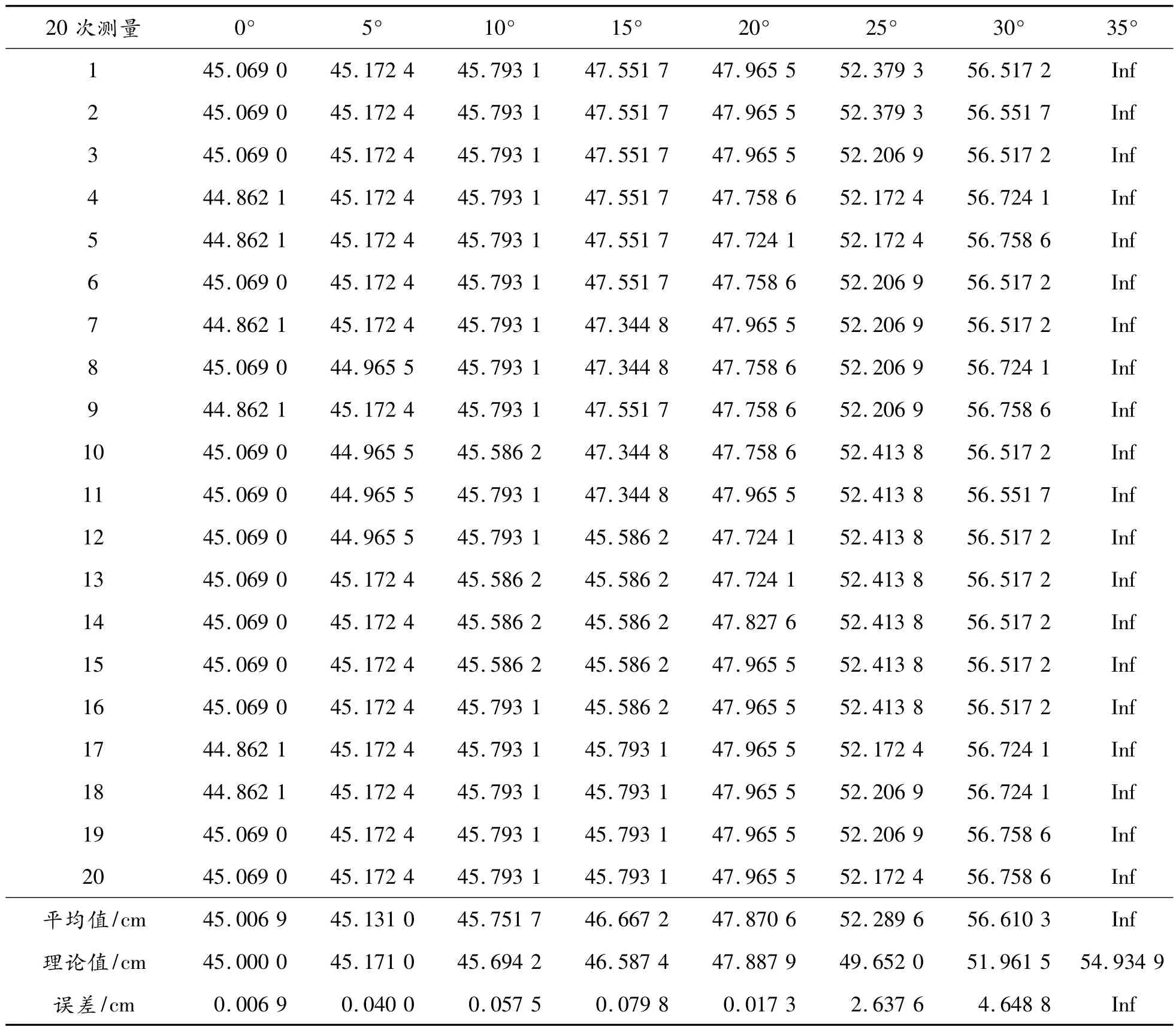
表1 超声波传感器方向角测量数据及分析
通过Matlab 对每个情形进行50 次仿真,然后将每次得到的定位坐标画成散点图,如图11 所示。
图11 为2 种方案的3 种情形测量坐标值的散点图,单位都是m,从图中可以看出,与真实坐标值相比,测量坐标值主要分布误差在2~3 cm,仿真结果证明2 种方案是可行的。
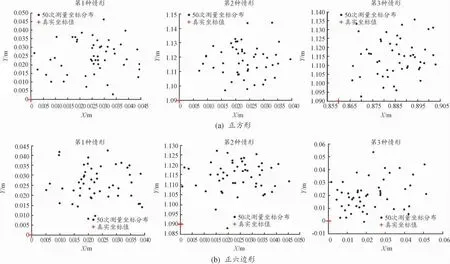
图11 正方形和正六边形3 种情形测量坐标值的散点图
对每个位置50 次仿真得到的数据,计算其均值和标准差,设定置信区间为0~4 cm,计算在此置信区间的置信度,结果如表2 和表3 所示。
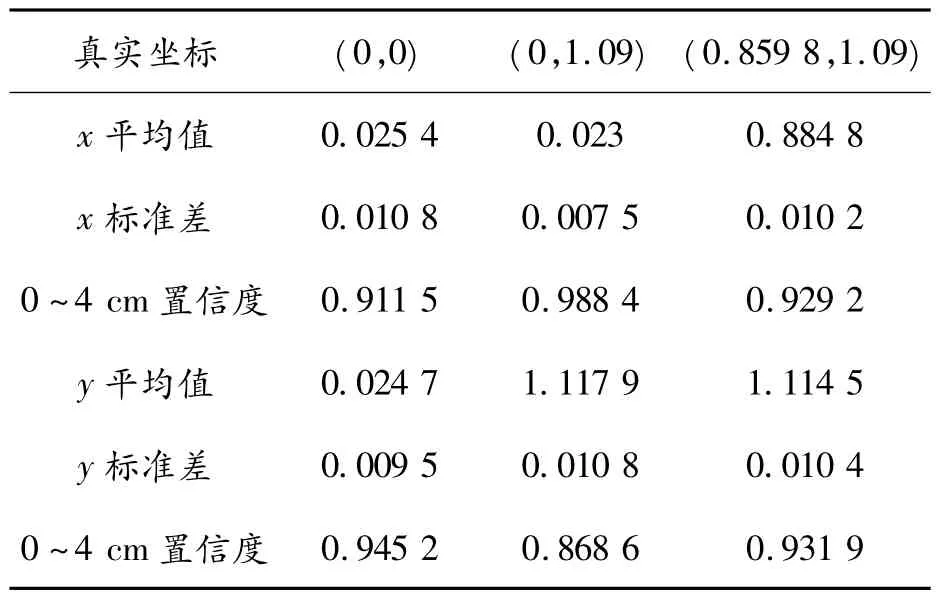
表2 基于正方形端点的布局方案误差分析
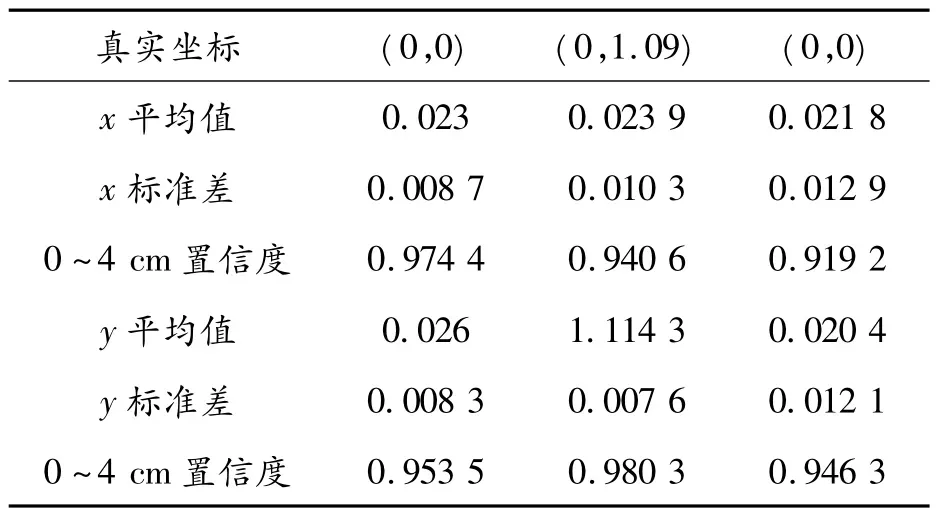
表3 基于正六边形端点的布局方案误差分析
可以看出较小的标准差代表这些测量数值较接近平均值,基于正方形端点的布局方案置信区间为0~4 cm 时的置信度最小为86.86%,最大为98.84%,平均置信度为92.91%;而基于正六边形端点布局方案置信区间为0~4 cm 时的置信度最小为91.92%,最大为98.03%,平均置信度为95.23%,因此正六边形的定位效果比正方形稍好,但两者误差皆可以控制在4 cm 以内,这也说明了布局方案的稳定性及可靠性。
使用CoppeliaSim Edu 软件对整个布局方案进行实时定位仿真,如图12、13 所示,仿真结果证明所提出的布局方案可以准确定位待定位物体。
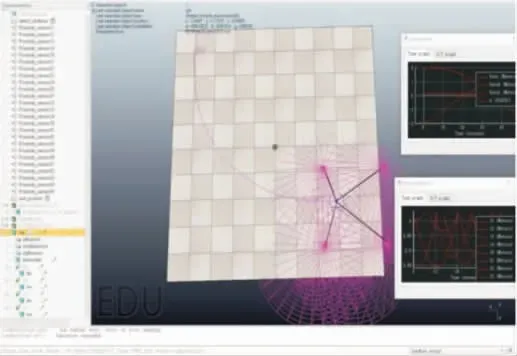
图12 使用CoppeliaSim Edu 对布局方案仿真
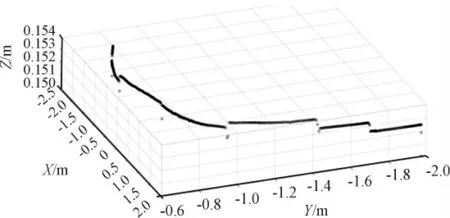
图13 使用CoppeliaSim Edu 对布局方案实时定位效果曲线
实验时的超声波定位系统的最终总成结构如图14 所示。该定位系统平台采用了铝材框架搭建,成形尺寸是90 cm×90 cm×90 cm。该实验平台硬件部分主要由以下几个部分组成:超声波发射阵列(2×2 个超声波发射探头);4—6 个超声波接收端;超声波信号发射和接收电路;主控模块STM32F103;计算机以及若干线材、厘米方格纸等。超声波定位系统实验平台软件部分主要由收发数据处理程序和计算程序组成。

图14 实验平台设计示意图
实验测试结果数据如表4 所示,可以看出,各个测试点的水平坐标误差也即x 轴方向坐标误差基本保持在4 cm 以内,竖直坐标误差即y 轴方向坐标基本也都保持在4 cm 以内,其中x 轴坐标和y 轴坐标误差大多集中在2.5~3.5 cm,其中x 轴坐标的平均误差为3.01 cm,y 轴坐标的平均误差为3.31 cm,各测试点实际位置与系统解算位置之间的距离平均误差为4.58 cm,基本满足定位系统的预期定位误差指标。
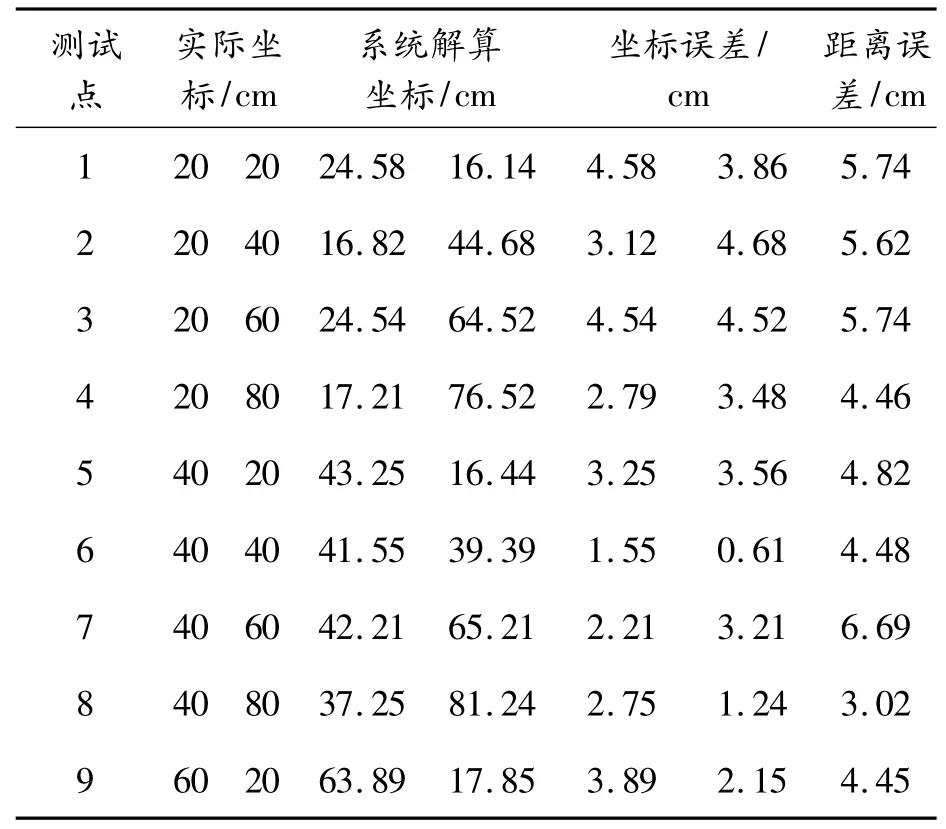
表4 实验数据分析
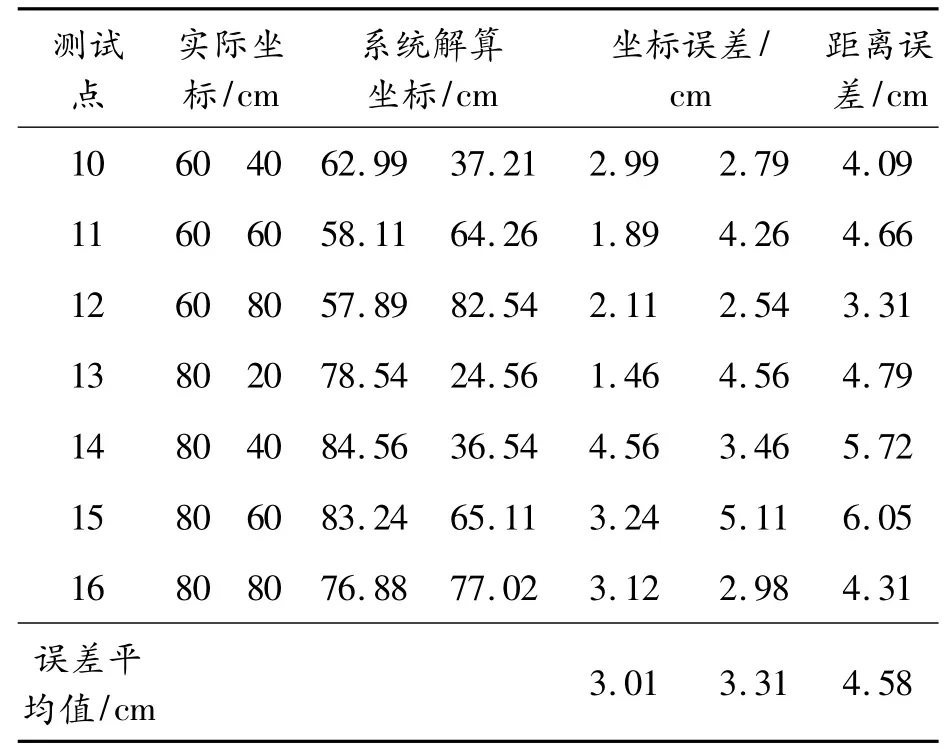
续表(表4)
为提升定位系统的部署效率,针对不同定位空间的超声波接收节点布置数量和位置计算相对繁杂这一问题,设计了固定的布局方案,可快速获取定位节点的布置数量和具体位置坐标,极大提升了定位系统安装的灵活性和便利性。
4 结论
通过对本研究所实现的超声波定位系统进行定位实验,根据最终结果表明,该定位系统的定位误差能够控制在4 cm 内,能满足提出的预期定位目标,而且通过提出的2 种布局方案将会极大地节约计算工作量和布置时间,所以一般情况下都能够满足大部分用户的定位需求。未来还可以进一步改进,通过更为巧妙的算法提高精度;使用发射角更大的超声波发射端以控制超声波接收端的数量并减少成本。
