利用侧扫声呐实现船舶目标的快速识别
2022-05-17陈晶晶王润田
王 晨,陈晶晶,王润田
(中国科学院声学研究所东海研究站,上海 201815)
0 引 言
与传统的陆上运输相比,水上运输具有成本低、载量大、经济环保等优势。伴随着我国经济和运输业的不断发展,船舶的总拥有量、运行速度、载重量等方面都有了显著提升,但事故发生率也相应增加。因此,完善水上交通系统,加强航行船舶的自动监控,是内河航运发展的必然趋势和要求[1]。
目前,常见的船舶监测方法有自动识别系统[2](Automatic Idcntification Systcm, AIS)、雷达[3-4]、视频监控等。然而这些方式都存在一些难以忽视的弊端,例如AIS系统,部分低吨位船舶并没有配备,所以会出现漏检现象;雷达监控耗资大,且在一些弯曲河道使用时会受到限制;视频检测主要是基于图像的目标识别技术[5-6],容易受天气、光照、水面反光等环境因素影响导致漏检或错检。
随着声学技术的不断发展,回声探测法在水下目标探测方面得到越来越广泛的应用,尤其是多波束声呐和侧扫声呐,广泛应用于水下目标探测与识别领域[7-8]。邬佳伟等[9]设计了一种利用侧扫声呐采集到的声图影区,对船闸内的静态船舶进行实载吨位测量的方法。但是该方法检测范围有限,而内河航运全航道水面比较宽,船舶航行具有一定的随机性,且不一定按照一个很窄的航路通行。因此,本文设法基于船舶本身的信号特点,研究一种能够适用于大范围航道针对动态船舶的快速识别方案。
1 理论模型
内河船的船体大多为钢结构,水下壳体以钢板或水泥壳为主。内河船船型结构规则,如图1所示,船体俯视面呈长方形,纵切面呈梯形,主驾驶舱位于船尾,航行方向如箭头所示。当声波从水中发射到船体时会发生强反射,且垂直入射点的回波信号最强,所以可以通过船体水下部分的回声特性来构建出船舶目标快速识别方法。

图1 内河空船及载货船Fig.1 Picture of inland ships
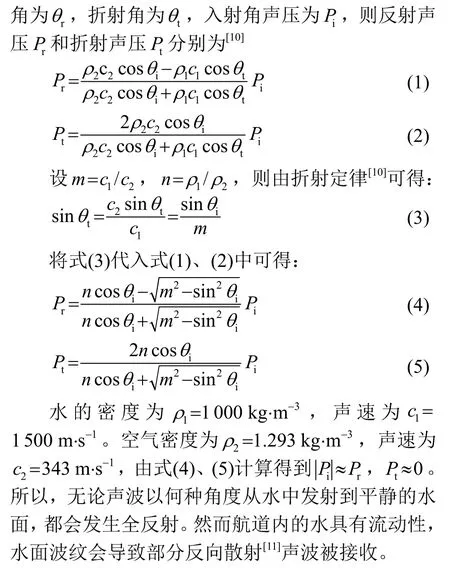
基于以上理论分析,考虑到侧扫声呐的声学特性及其性价比等因素,建立利用侧扫声呐进行船舶检测的模型如图2所示:将拖鱼安装于航道侧壁的底部,利用安装在拖鱼上的单侧换能器线阵发射声波到水面。当船舶经过时,会接收到船体水下部分的反向散射信号,其中船体与水面的交界处反射信号最强,船舭部次之。
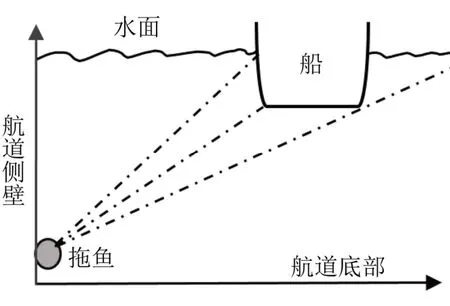
图2 基于侧扫声呐检测模型Fig.2 Detection model based on side-scan sonar
2 实验测试
2019年,项目组在广西西江上建立了一套船舶吃水深度检测系统,并利用该系统进行了本研究的实验。该处航道宽度为120 m,实验中使用的侧扫声呐发射频率为150、450 kHz,水平波束开角分别为 0.6°和 0.2°,垂直波束开角为 50°。由于设备安装在航道侧壁,所以只用到侧扫声呐的B侧鳍,如图3(a)所示。安装深度为21 m,为了使声束尽量覆盖整个航道,调整拖鱼的安装角度,最终声束覆盖范围如图3(b)中的阴影区所示。

图3 系统安装示意图Fig.3 Schematic diagram of system installation
该系统采用24 h连续工作方式,声发射频率为1 s发射5次,监测航道范围为14.7~120 m。
2.1 声图特征
在声图中用灰度来代表信号强度,暗色代表回波信号较弱,亮色代表回波信号较强。船舶进入检测点时,由于船体的强反射在声图中呈现出明显的结构特征。如图4(a)所示,载重船的成像呈梯形,这与船体的纵切面形状一致。如图4(b)所示,空船的成像为一条逐渐增强的亮线,这与空船船尾重、船头轻的行驶状态相吻合。
图4 不同目标的侧扫声呐声图Fig.4 Acoustic images of different targets displayed by side-scan sonar
实验记录中还发现,除了船舶(载重船、空船)会在声图中有明显的特征之外,鱼群、渔网、垃圾漂浮物或者下雨,也会产生明显的影像,如图4(c)~4(f)所示。虽然这些伪目标可能会给船舶的自动识别造成干扰,但是从声图上可以看出不同的目标有不同的结构特点。
2.2 数据分析
(1)船舶目标会引起信号能量的变化。
设第i帧的回波信号声压为Pi(j) ,j=1,2,… ,N,其中:j为采样点,N为采样总数。则计算单帧信号的能量值为

利用Matlab对图4中的6种信号进行能量统计,结果如图5中的实线所示,虚线框内是目标出现的位置。
通过图5(a)和图5(b)的能量变化图可以看出,当船舶驶入检测点时信号能量会明显增强。其中,载重船的能量值随着船体的驶入迅速增加,空船的能量值随着船体的驶入逐渐增强。
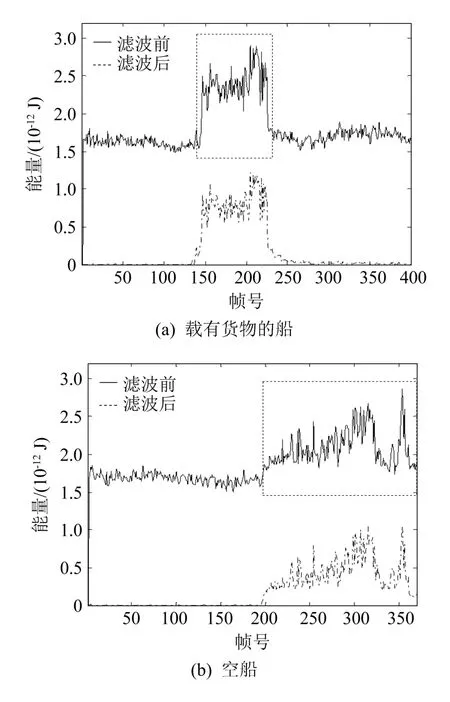
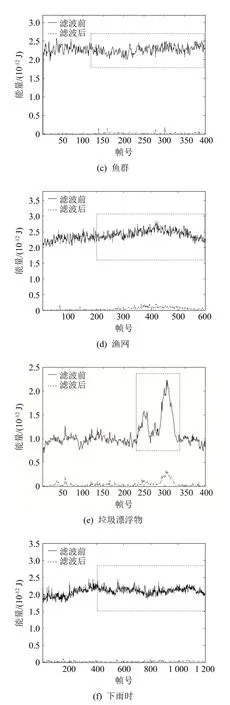
图5 不同目标的回波信号能量变化图Fig.5 Energy change of different target echo signals
同理,伪目标也可能引起能量变化,结果如图5(c)~5(f)所示:鱼群、渔网、下雨时的能量变化并不明显;垃圾漂浮物受其材质、大小等因素的影响,能量增加幅度较大,并且只从能量上来看,在某个瞬时与船体目标近似,容易导致误判。
由于环境信号相对稳定,可以将其作为本底噪声进行处理。经过统计分析,选取连续的几帧(比如3帧)环境信号对本底噪声进行滤波效果较好。设选取的连续3帧为第k,k+1,k+ 2 帧的环境信号,则滤波后的信号Psi(j) 和信号能量Esi(j)分别为[10]

图4中6种信号滤波后的能量结果如图5中的虚线所示。滤波后的环境能量值约为 0,船舶的能量依然很强,垃圾漂浮物的能量值虽有明显减小,但依然强于环境信号。
(2) 船舶声图中存在明显的线型结构特征。
在本实验的声发射频次下,一艘船的总帧数一般在50帧以上。图6为不同目标的声图和单帧信号图。从图4(a)~4(b)可以看出,船体水下结构的棱角部位回声信号能量最强,且具有连续性,形成线型图案。而其他伪目标没有这种结构特征,如图4(f)所示,从连续多帧的信号图来看线性结构并不清晰。例如,图6(a)中第48帧经过滤波后的信号如图6(b)所示,该帧信号信号幅度的最大值为第6 528个采样点的位置,对应于船体与水面的交界处,这是由于船体与水面交界处的回波信号强。图6(c)中的第 94 帧经过滤波后的信号如图6(d)所示,信号幅度最大值为第6 337个采样点的位置,对应声图中能量最强的位置。
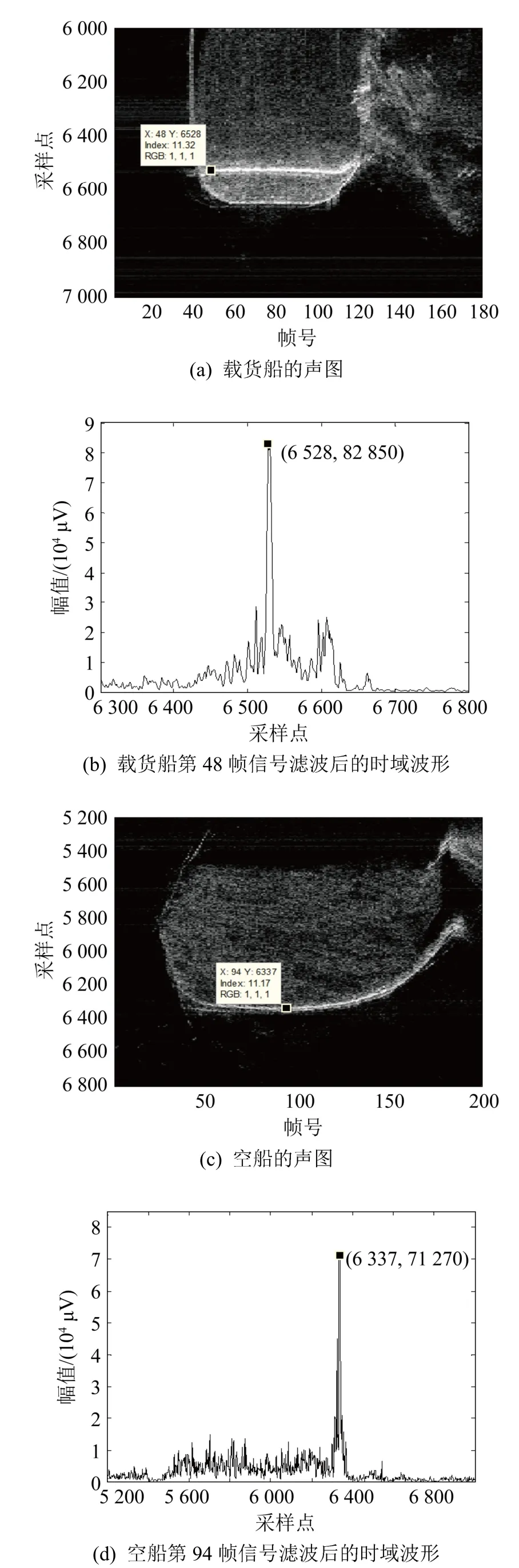
图6 不同目标的声图和单帧信号图Fig.6 Acoustic images of different targets and the signal waveform of a single frame
分别对图4中载重船、空船、垃圾漂浮物的前10帧的回波幅度最大值的采样点位置坐标进行了统计,结果如表1所示。船舶目标相邻帧的最大值的采样点位置很接近,而垃圾漂浮物的波动较大。

表1 载物船、空船、垃圾漂浮物的前10帧最大值坐标Table 1 Sampling points of empty ship, ship with cargo and floating object corresponding to the maximal values in the first 10 frames
进一步计算三种目标回波幅度最大时采用点位置的平均差,船舶信号的平均差较小,载重船为1.2,空船为3.5,垃圾漂浮物的平均差较大,为78.4。
3 船舶快速识别方法试验
基于以上分析,总结出基于侧扫声呐的船舶目标信号具有以下两个特点:首先,当船舶经过时,信号能量会明显增强;其次,船舶具有明显的线型结构特征,即信号回波幅度的最大值采样点位置平均差小。根据以上结论,提出一种船舶目标快速识别方法,其流程图如图7所示(图中Esi为滤波后的信号能量,Es为能量阈值,Flag为疑似船舶标记,Xi为Flag=1后的第i帧信号能量的最大值采样点位置,X为Xi的平均差,Xs为平均差阈值)。
图7 船舶目标快速识别流程图Fig.7 Flow chart for rapid identification of ship target
(1) 对原始信号Pi的本底噪声进行滤波,得到信号Psi;
(2) 计算信号Psi的能量Esi;
(3) 航道环境相对稳定,船舶信号特点明显,尤其是滤波后,环境噪声的能量值几乎为 0,因此可以利用先验知识设定能量阈值Es。当Esi>Es时,进行疑似船舶标记Flag=1;
(4) 当Flag=1时,开始计算信号的能量最大值的采样点位置Xi,连续计算10帧;
(5) 计算采样点位置的平均差X;
(6) 同样利用先验知识设定一个平均差阈值Xs,当X>Xs时,则可以判定该目标为船舶目标。
利用实验中获得的实验数据,对该方法进行测试。如图8所示为某一时间段内经过监测点的船舶声呐图像。检测结果如表2所示。

图8 一段时间内检测到的船舶声图Fig.8 Ships detected in a period of time
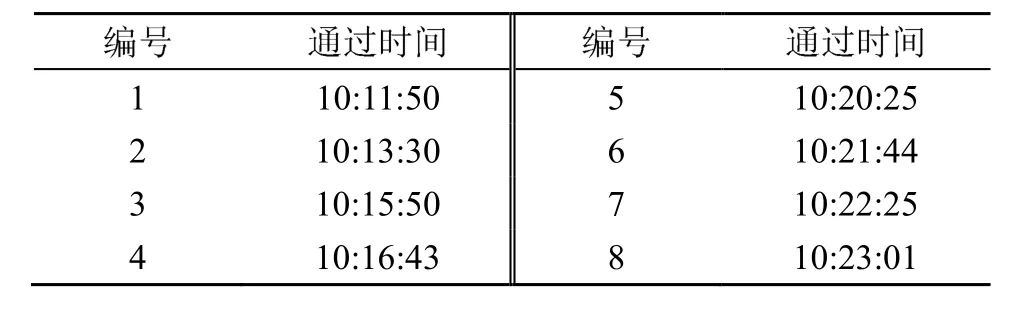
表2 对图8中的船舶检测结果Table 2 Detection results of all ships in Fig.8
通过对大量实验数据的检测,该方法对船舶的识别率可以达到 95%。引起漏检的主要原因有两点:(1) 当两艘船交汇重叠时,只能检测出离拖鱼近的那一艘。这是因为离得近的回波信号较强,在做最大值分析时只抓到离得近的点。(2) 当船在检测点直角拐弯时,信号呈大尺度弧形,信号幅度最大值的采样点的平均差难以满足判别条件。针对以上不足之处,可以考虑通过调整设备安装角度或在航道另一侧增设一套设备解决。
4 结 论
本文利用回波探测原理,设计了一种利用声呐进行内河航运船舶监测的方法。基于大量实验数据分析,总结了船舶目标的信号特点,提出了一种利用侧扫声呐对船舶目标进行快速识别的方法,即根据信号的能量变化特征和船体的线型结构特征快速判别船舶目标。该方法具有检测率高、虚警概率小、监测范围大、实时性好等优势,为进一步监测船舶吃水深度、速度、种类等交通流参数提供了理论支持。
