人工膝关节假体的磨损性能分析
2022-05-17焦朵朵高子瑞
焦朵朵,高子瑞,刘 峰
(1.中北大学机械工程学院,山西 太原 030051)(2.山西省先进制造重点实验室,山西 太原 030051)
超高分子量聚乙烯(ultra-high molecular weight polyethylene,UHMWPE)胫骨部件的磨损限制了膝关节假体远期使用寿命[1]。王猛[2]研究发现膝关节假体冠状面几何参数会对接触力学产生影响,由于捷迈NK-Ⅱ假体冠状面形合度高于强生PFC假体,因此步态周期内其瞬时接触面积相对较大。宋春燕等[3]研究发现,股骨部件的冠状面半径、胫骨部件的冠状面半径和矢状面后端半径是影响膝关节假体接触力学的重要几何参数,改变几何参数对假体进行优化设计可显著减小接触面积。
为了更加准确预测膝关节假体的使用寿命,一个合理的磨损模型至关重要。Strickland等[4]基于销盘90°交叉运动磨损试验确立了磨损深度与滑动距离之间的函数关系,任意交叉运动下的磨损率可基于90°交叉运动下的试验数据进行数值计算,有效解决了交叉剪切这一关键变量对磨损的影响,但该磨损模型未考虑接触应力变量对磨损的影响。Liu等[5]对文献[4]中提出的磨损模型进行了完善,引入接触应力与摩擦系数之间的函数关系来计算摩擦功,最终确立了磨损深度与摩擦功之间的函数关系,有效耦合了接触应力、交叉剪切这两个关键因素,该磨损模型已在高子瑞等[6]建立的髋关节假体磨损仿真分析中得到了验证。
目前文献[5]中的摩擦功磨损模型尚未应用于膝关节假体,本文基于此磨损模型对捷迈NK-Ⅱ、强生PFC假体进行磨损仿真分析,研究膝关节假体几何参数对磨损的影响,进一步基于膝关节假体验证摩擦功磨损模型,为膝关节假体优化设计提供理论依据。
1 磨损模型
UHMWPE的磨损深度与接触应力、交叉剪切、滑动距离3个变量密切相关。瞬时线性磨损深度Wd的表达式为:
Wd=KM·f(CS)·f(FW)
(1)
式中:KM为磨损深度稳定值;f(CS)为交叉剪切函数;f(FW)为等距离90°交叉运动下的磨损深度形函数。
1.1 磨损深度形函数
本文基于γ辐射剂量为4 Mrad的GUR 1020 UHMWPE销在接触应力4.7 MPa时等距离90°交叉运动下的试验数据[4],建立了磨损深度与摩擦功之间的函数关系,如图1所示。当摩擦功小于摩擦功临界点(FWC)时,随着摩擦功的不断增加,磨损深度增长得较快,将初始磨损率记为KT,大小为78.125 pm/(N·mm);当摩擦功大于FWC时,随着摩擦功的不断增加,磨损深度增长得比较缓慢,最终趋于稳定,将稳定值记为KM,大小为45.5 pm。
基于以上试验数据拟合出磨损深度形函数f(FW)的表达式为:
(2)
式中:FW为单位面积上的摩擦功;FWC大小为KM/KT。

图1 UHMWPE销等距离90°交叉运动时磨损深度与摩擦功曲线图
Saikko等[7]基于销盘摩擦试验研究了接触应力cp对摩擦系数η的影响,研究发现随着接触应力的不断增加,摩擦系数逐渐减小。基于试验数据得出η与cp之间的函数关系为:
(3)
单位面积上摩擦功FW的表达式为:
(4)
式中:s为相对滑动距离。
1.2 交叉剪切函数f(CS)
本文采用文献[6]中的方法量化交叉剪切,任意交叉运动下的磨损深度可基于90°交叉运动时的磨损深度进行数值计算,当前瞬时交叉剪切计算示意图如图2所示。交叉剪切函数的表达式为:
(5)
式中:μi为极化强度因子;φi为历史位移矢量在聚乙烯材料点坐标轴下的角度;θ为当前位移矢量在聚乙烯材料点坐标轴下的角度。
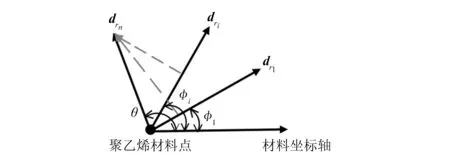
图2 交叉剪切计算示意图
当前瞬时磨损深度极限Wp的表达式为:
Wp=KM·f(CS)
(6)
极化因子中间变量λ的表达式为:
(7)
通过建立极化矢量数组(polar vector array,PVA)来存放μi和φi,PVA初始值定义为[1,0°]。每次添加新的位移矢量drn需判断与历史位移矢量dri是否存在共线情况,若ddn与dri无共线情况,则在PVA数组中添加新数据:μi+1=λ,φi+1=θ;若drn与之前第j个位移矢量drj存在共线情况,则μj=μj+λ,同时还需通过λ对μi进行等比例缩放:
μi=μi·(1-λ)
(8)
2 膝关节有限元模型磨损分析
2.1 膝关节有限元模型
本文基于ABAQUS有限元分析软件分别建立捷迈NK-Ⅱ、强生PFC假体有限元接触力学模型,将用户子程序UMESHMOTION与ALE自适应网格划分技术相结合进行磨损仿真分析,研究膝关节假体几何参数对磨损的影响。图3为两种膝关节假体在冠状面和矢状面的几何形状对比图[8],强生PFC假体中股骨和胫骨两部件在冠状面轮廓匹配呈曲线-曲线,而捷迈NK-Ⅱ假体中两部件在冠状面轮廓匹配呈直线-直线。

图3 强生PFC与捷迈NK-Ⅱ假体几何结构对比图
图4为捷迈NK-Ⅱ假体有限元模型所需定义的边界条件。由图可知,对胫骨部件定义前-后移动以及内-外旋转运动;在股骨部件内侧偏移5 mm建立参考点RP-1,RP-1与股骨部件之间定义刚体约束,在RP-1上定义垂直向下的载荷以及弯曲-伸展运动,同时将股骨部件的内-外旋转自由度放开。单个步态周期内膝关节假体有限元模型的载荷和运动输入条件基于ISO 14243-3 2014[9]位移控制条件进行定义,有限元模型中股骨和胫骨部件的网格大小均为1 mm。经过收敛性分析,最终确定单个步态周期的瞬时个数为100,磨损周期放大系数为6.25万。
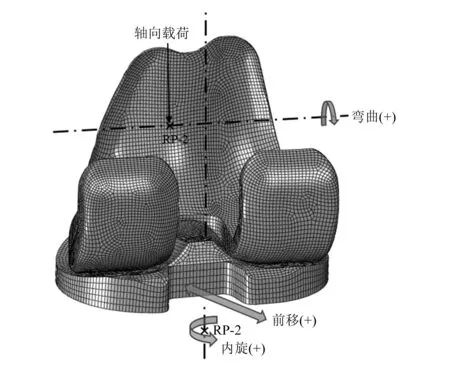
图4 捷迈NK-Ⅱ假体有限元模型的边界条件示意图
2.2 磨损分析流程
基于摩擦功磨损模型分别对强生PFC、捷迈NK-Ⅱ假体进行5百万标准步态周期磨损仿真,单个步态周期的磨损仿真流程如图5所示。首先累计每个节点历史周期总的磨损深度,对胫骨部件进行几何更新,为当前步态周期进行接触力学分析提供新的几何模型;其次对有限元接触力学模型依次定义材料、相互作用属性、运动条件以及边界条件,进行接触力学分析;最后使用ABAQUS有限元分析软件中的用户子程序UMESHMOTION基于Fortran语言编写节点磨损深度的计算程序,根据接触力学分析结果,在每个增量步的末尾提取胫骨接触表面上每个节点的接触应力、相对滑动距离,为磨损模型提供输入条件,依次计算每个节点的磨损深度。所有步态周期依次重复上述磨损分析步骤直至最后一个步态周期磨损仿真分析完成。
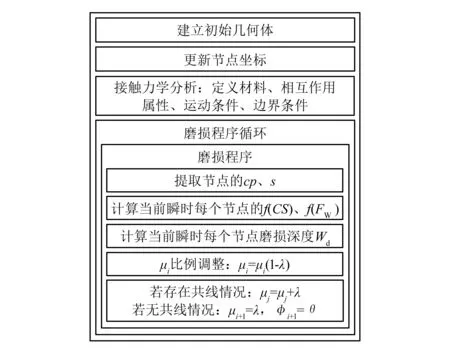
图5 单个周期磨损仿真流程图
3 结果与讨论
5百万步态周期内,捷迈NK-Ⅱ、强生PFC假体的磨损体积如图6所示。两膝关节假体磨损体积均随磨损周期的增加而线性增加,强生PFC假体5百万周期总磨损体积为3.3 mm3,而捷迈NK-Ⅱ假体为1.9 mm3,比强生PFC假体的磨损率低42%。O′Brien等[10]使用膝关节模拟机基于ISO 14243-3 2009位移控制条件研究了膝关节假体的磨损,得出强生假体的磨损率为3.37±0.6 mm3/MC,而本文中强生假体的磨损率为0.66 mm3/MC,远低于模拟机试验结果。虽然摩擦功磨损模型已在髋关节假体中得到了验证,但本文中膝关节假体磨损仿真结果偏低,其原因可能是膝关节假体的交叉剪切远低于髋关节,该磨损模型在低交叉剪切运动下的磨损还需进一步通过销盘试验进行研究。

图6 捷迈与强生假体磨损体积对比图
图7为两膝关节假体磨损5百万周期线性磨损深度分布图。强生PFC假体的最大线性磨损深度显著高于捷迈NK-Ⅱ假体,其原因是捷迈NK-Ⅱ假体矢状面形合度相对较低,载荷作用分散于胫骨部件各个位置,而强生PFC假体矢状面形合度相对较高,载荷作用力均集中于胫骨部件内侧和外侧的中心位置,单个周期内重叠接触面积较大,因此强生PFC假体的节点线性磨损深度相对较大。

图7 强生PFC(左)与捷迈NK-Ⅱ(右)模型磨损5百万周期线性磨损深度对比图
在步态周期14%、50%、90%内,两膝关节假体磨损前和磨损5百万周期后接触应力分布如图8所示。由于本次磨损仿真结果中两膝关节假体的线性磨损深度均相对较小,因此与磨损前相比,3个瞬时在磨损后的接触应力云图变化均不显著。在步态周期14%、50%、90%内,强生PFC假体磨损前和磨损后对应的接触面积依次为202.03,169.12,45.73 mm2;203.68,177.17,41.82 mm2。捷迈NK-Ⅱ假体磨损前和磨损后对应的接触面积依次为253.16,215.6,49.66 mm2;256.24,226.35,47.10 mm2。由此可知,由于捷迈NK-Ⅱ假体中冠状面形合度大于强生PFC假体,因此在磨损前和磨损后其瞬时接触面积均大于强生PFC假体。

图8 捷迈NK-Ⅱ与强生PFC模型接触应力对比图
4 结束语
本文基于ABAQUS有限元分析软件对捷迈NK-Ⅱ、强生PFC假体进行5百万标准步态周期磨损仿真,研究了膝关节假体几何参数对磨损的影响。结果表明,捷迈NK-Ⅱ假体的磨损率显著低于强生PFC假体,其原因是捷迈NK-Ⅱ假体矢状面形合度相对较小,载荷作用力相对分散,单个周期内股骨和胫骨的重叠面积较小,导致其磨损体积和节点线性磨损深度较小;同时捷迈NK-Ⅱ假体冠状面形合度低于强生PFC假体,导致其平均接触应力相对较小,进一步降低了磨损率。虽然在膝关节假体中,基于摩擦功磨损模型预测磨损率低于模拟机试验数据,但是该磨损模型较好地预测了膝关节假体几何参数对磨损的影响,为假体优化设计提供了理论基础。
