基于GNSS与场量传感器的振动数据同步采集系统设计
2022-05-17耿煜琛张晓明韩玉香
耿煜琛,张晓明,2,韩玉香
(1.中北大学仪器与电子学院,山西 太原 030051)(2.中北大学仪器科学与动态测试教育部重点实验室,山西 太原 030051)
在现代战争中,地下侵彻武器发挥着越来越重要的作用。在侵彻武器研发过程中,毁伤能力评估是必不可少且十分重要的一环。这其中侵彻武器的炸点定位是进行毁伤评估的基础[1]。目前广泛采用侵彻武器爆炸产生的振动波信号对炸点进行定位以及对毁伤效果进行评估[2]。
在实际测试中,由于各个节点之间的时间基准不一致,不能确定爆炸振动波到达节点的时间,影响炸点定位的精度[3],因此必须对分布式节点采集的数据进行时间同步。振动波的传播速度约为5 500 m/s,为实现米级定位,要求节点同步误差小于15 μs[4]。若利用无线网络实现大范围内节点数据的同步采集对无线链路的依赖性较强,时间同步误差随距离增加而增大,因此无法用于环境复杂、范围较广的爆炸场环境[5]。利用GNSS(global navigation satellite systems)高精度授时模块实现分布式节点数据的同步采集[6],由于卫星授时无累计误差,受距离影响较小,在室外开阔环境下不同的卫星接收机之间的时间同步误差仅有十几纳秒,因此可以满足系统对炸点定位的需求[7]。在利用插值算法[8]对振动波的传播特性进行分析时,必须准确得到振动波在各个位置点的矢量信息,因此需要对节点位置以及振动矢量进行采集[9]。为了得到准确的节点位置,采用事后处理的GNSS-PPK(post processed kinematic)技术进行定位测量,PPK定位技术定位精度可以达到毫米级[10]。利用加速度计与磁传感器组成姿态测量模块,在节点安装完成后对节点姿态进行测量,通过补偿算法实现分布式节点振动数据的空间统一。在1 km×1 km的范围内实现米级定位精度以及反演精度,振动波矢量角度误差要小于0.5°。
针对以上需求,本文设计了基于GNSS与场量传感器的振动数据同步采集系统,该系统相对于传统的同步采集系统,结构简单、功耗低、适应性强,便于安装与移动,在爆炸场等大范围、分布式节点的振动数据采集中具有较高的实用价值。
1 系统整体设计及硬件组成
针对爆炸场振动测试覆盖范围大、环境复杂等问题,根据炸点定位算法、物理场反演技术对数据的高时空同步要求,依靠GNSS高精度定位授时技术、PPK技术,利用场量传感器组成姿态测量模块,设计了一种针对振动监测的分布式数据同步采集系统,系统由数据采集模块、控制模块以及存储模块组成。数据采集模块主要由GNSS接收机、振动监测数据采集模块和姿态采集模块组成;控制模块主要由单片机以及无线模块组成,通过LoRa无线通讯技术实现大范围的分布式节点控制,满足节点的低功耗要求与数据同步采集需求;存储模块采用体积较小的SD卡存储测试数据,以减小节点体积,提高其环境适应性。系统整体及硬件设计如图1所示。
2 多节点数据同步采集设计
2.1 时间同步原理
时间同步采集就是在同一时间基准下,各个分布式节点在同一时刻对数据进行采样。因此每次采样时需要确定节点此时在统一时间基准下的时间坐标,以及此时传感器的有效数据。
GNSS的每个卫星内部都配有高精度的原子钟模块,能够与地面基站进行时间校准,因此本文系统利用GNSS卫星接收机采集卫星信号获取高精度授时信息,并依靠自身晶振模块具备短时内的守时能力[11],在校准后以固定频率的秒脉冲输出方波信号以及通过串口输出解码卫星信号的UTC(universal time coordinated)时间信息,实现接收机输出信息与卫星时间基准的同步。多个卫星接收机模块在接收卫星信号质量良好的情况下可以实现时间基准的统一。各个节点的MCU(microcontroller unit) 根据接收机输出时间基准进行数据采集与存储,达到同步采集的目的。
2.2 时间同步方案设计
在卫星接收机模块输出时间基准后,需要将节点采样时间与时间基准坐标进行校准。
时间校准由两部分组成,一部分是利用无线指令控制节点开始采集,并结合PPS秒脉冲与UTC时间实现开始时间同步;另一部分是GNSS高精度授时模块产生PPS脉冲作为外部脉冲信号输入A/D模块的转化外部触发引脚,触发采样。其原理如图2所示。

图2 时间同步原理
2.2.1采集开始时间校准
控制中心通过无线网络广播指令控制节点开始采集,节点收到无线控制指令后,开启串口接收中断,接收到GGA(global positioning system fix data)协议数据后,读取其中的UTC时间信息,并开启MCU外部中断5,等待下一次PPS秒脉冲触发,从而减少了无线传输导致的同步采集误差,其原理如图3所示。
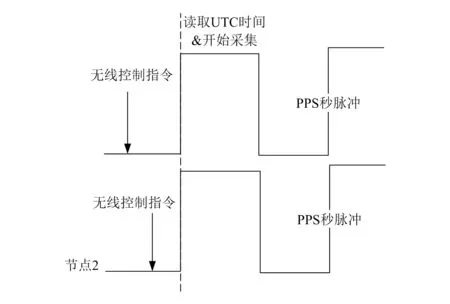
图3 同步开始采集原理
2.2.2采集时间校准
将PPS秒脉冲输入A/D模块的start引脚触发A/D模块内部复位,A/D模块对三轴振动数据进行采样。完成采样后A/D模块触发单片机外部中断,单片机中断处理函数通过SPI读取多路转化数据,完成数据的同步采集,具体流程如图4所示。

图4 同步采集流程图
接收机模块以10 Hz的频率通过串口输出GGA数据,通过TIMEPLUSE管脚输出占空比为50%、频率为50 kHz的方波信号。通过读取各个节点的UTC时间,确认开始采集时刻,若UTC时间一致,则开始时刻保持一致,若UTC时间存在差异,根据UTC时间差值,对开始采集时间进行校准。
在开始时间同步后,第一个采样点时刻即第一个脉冲上升沿时刻,为时间基准0时位置,之后每个采样点对应一个时间点,如图5所示,其中T为采样周期。
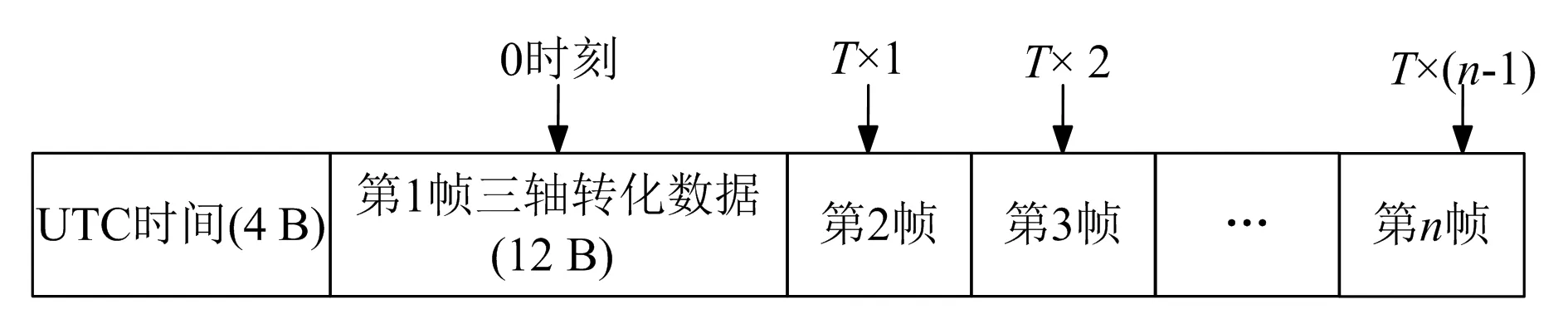
图5 数据与时间点对应关系
3 多节点数据空间统一设计
3.1 PPK定位技术
PPK定位技术是在GNSS-RTK(real time kinematic)载波相位差分技术的基础上,通过保存观测数据进行事后处理的动态定位技术,其解算定位精度可达到毫米级,既具备RTK定位精度高的特点,又解决了RTK定位对数据链路要求较高的问题,更加适合爆炸场等环境复杂、时效性要求较低的场合[12]。
在实际工程中,提取各个节点卫星接收机输出的UBX格式的星历和观测数据文件,利用RTKLIB工具中的RTKCONV分离观测数据的星历文件和观测文件,再通过RTKPOST导入参考站高精度位置坐标以及参考站的观测数据,在差分定位模式中可以计算出节点相对参考站的坐标位置。对各个节点与同一参考站进行数据处理,即可将所有节点位置统一到同一空间坐标系中。
在进行节点定位时需要对天线与传感器的相对位置进行测定,以提高定位准确度。将卫星接收机天线放置在节点传感器的正上方,方案设计如图6所示。

图6 天线与传感器相对位置关系
3.2 矢量数据空间统一
3.2.1传感器的标定
传感器在生产与组装过程中,可能存在不正交角、零点偏移误差以及灵敏度误差等,因此需要在采集测试之前分别对加速度传感器、三轴磁传感器以及三轴振动传感器进行标定。利用三轴振动传感器的标定数据,实现电压值与加速度值之间的转换,并将振动矢量数据转换到节点载体坐标系。同时为了保证节点姿态信息的有效性与准确性,还需要对三轴振动传感器敏感轴方向与由加速度计和三轴磁传感器组成的姿态测量模块敏感轴方向之间的角度偏差进行标定,保证姿态信息的一致性。
3.2.2节点姿态测量与补偿
在一定范围内,根据地磁场与重力场区域不变的特性,利用三轴加速度传感器与三轴磁传感器组成姿态测量模块,测量节点在E-N-U坐标系的俯仰角θ、滚转角ψ和偏航角γ。
在布置完成测试节点后采集并保存节点姿态信息。根据静态采集的三轴加速度数值,解算出节点载体坐标系在E-N-U坐标系下的俯仰角θ与滚转角ψ,再根据三轴磁传感器解算出节点的偏航角γ。根据坐标转化公式[13],将节点数据转化到大地坐标系下,从而实现振动数据的矢量空间基准统一,整体方案如图7所示。

图7 节点姿态补偿过程
4 实验验证
4.1 多节点时间同步验证
将两个节点A/D模块的模拟输入端接入同一信号发生器的信号输出端,模拟振动采集过程。将两个节点的采集数据同步到同一时间基准下,提取同一个时刻两个节点的电压差值。根据输出信号时域内的线性方程计算两者之间的时间差,即为节点之间的同步误差,实验数据如图8所示。
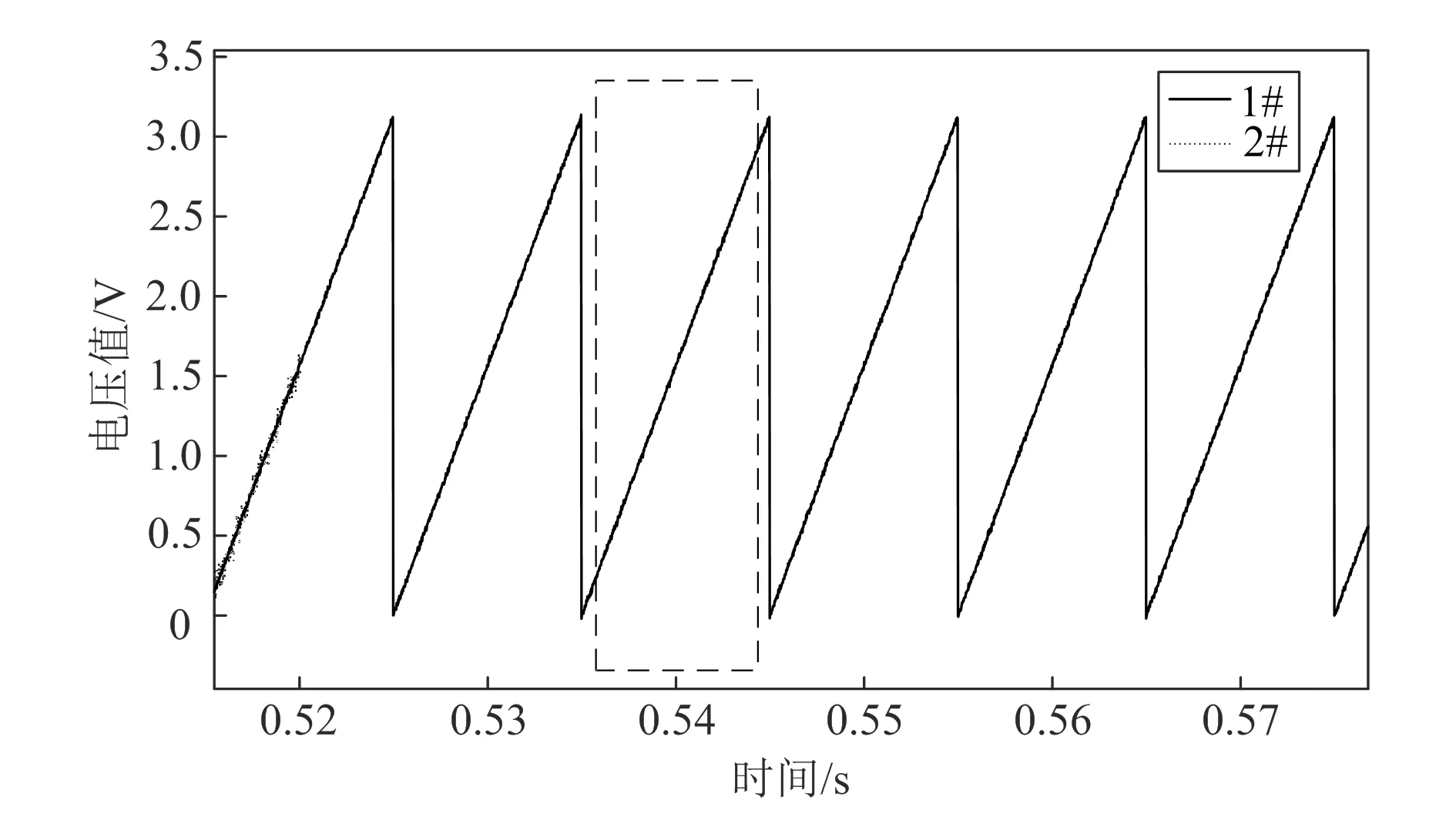
图8 多节点同一信号采集结果
提取两节点虚线内的电压差值,并根据锯齿波线性方程,将电压差值转化为时间差。由图9可知,分布式节点的同步误差小于5.5 μs。
4.2 节点空间位置精度验证
为了验证PPK技术的定位精度,采用基线为50 m对固定节点位置进行定位,将定位结果与全站仪测量的位置进行比对。结果表明,水平方向的定位精度达到毫米级,高程方向的定位精度达到厘米级。E-N-U方向上定位精度如图10所示。

图9 虚线内节点同步误差时间同步误差
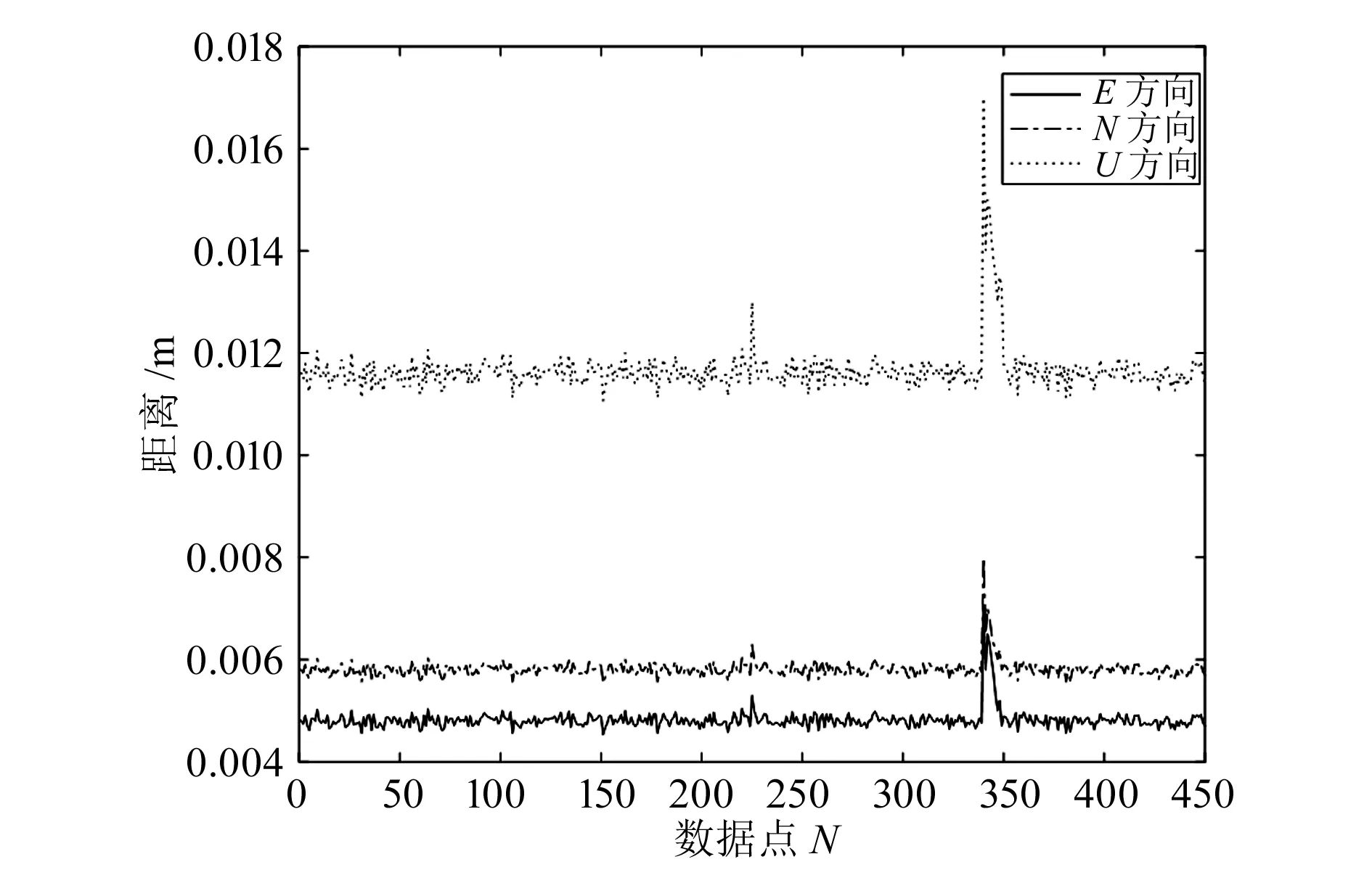
图10 节点GNSS在E-N-U方向上的定位精度
4.3 节点矢量数据同步验证
将3个节点与模拟炸点的地面投影点放置在同一条直线上,节点振动传感器X方向指向炸点,如图11所示。各节点振动波P波水平分量的矢量方向应保持一致,通过对标记点进行锤击模拟侵彻武器的爆炸过程,根据各个节点对振动波水平矢量方向的误差来验证多节点之间的空间统一性。
图11 实验布设方案
在数据采集完成后,首先利用标定数据对三轴振动数据进行补偿,将振动数据转化至载体坐标系,根据振动波幅频特性对不同轴向振动数据中的P波进行提取[14],提取结果如图12所示。通过对比X轴、Y轴的P波能量值,确定各个节点的传入振动波水平矢量方向。

图12 姿态补偿前各节点X、Y轴P波分量
节点与炸点地面投影点的连线作为基准矢量方向,姿态补偿前,各节点矢量反演结果如图13中虚线箭头所示,由图可知,3个节点矢量方向误差较大,与实际振动传入方向偏差较大,无法满足对爆炸场炸点定位的需求。采集各个节点的姿态角,见表1,完成姿态补偿后,通过矢量旋转得到3个节点的振动矢量如图13中实线箭头所示。姿态补偿后E-N-U坐标系下各节点最大矢量角的误差小于0.5°,具体见表2。

图13 姿态补偿前后节点E-N面内振动矢量方向反演结果

表1 各个节点在E-N-U坐标系下的姿态角 单位:(°)

表2 平面反演振动矢量角度误差 单位:(°)
5 结束语
本文针对侵彻武器毁伤能力评估过程中大范围爆炸场环境下的分布式多节点振动数据时间同步与空间统一的问题,设计了一种基于GNSS技术与物理场姿态测量技术的振动数据时空同步采集系统。通过模拟振动实验,验证了系统的时间同步误差小于5.5 μs ,矢量方向误差小于0.5°,节点位置定位精度达到毫米级,能够满足对爆炸场炸点定位以及毁伤能力评估的要求。该系统结构简单、体积较小,便于布设与安装,能够实现大范围远距离的控制,可以稳定地工作在爆炸场测试环境以及其他大范围振动环境下,为侵彻武器的毁伤能力评估与炸点定位奠定了基础。
