基于转矩补偿的动车永磁电机电磁优化设计
2022-05-17薛秀慧
姜 琛,薛秀慧,张 磊
(中车永济电机有限公司,山西 永济 044502)
随着我国交通水平的日益提升,对动车的性能要求也随之提高。永磁同步电机(PMSM)是现阶段应用在动车系统中最为广泛的设备之一,结构简单且伺服性能优越[1-3]。虽然该电机是一种非线性、多变量的控制电机,应用至伺服系统中效果较为良好,但系统参数若发生改变,则会出现转矩扰动,使电机抗干扰性能与应变能力变差[4]。因此,较多学者针对电机性能提出了优化方法,如刘福贵等[5]研究了双C型定子横向磁通永磁电机的优化设计方法,王可煜等[6]研究了基于非线性抗扰滑模控制的永磁同步电机直接转矩控制方法。然而这些方法对电机转速的优化效果较差。本文基于转矩补偿对动车永磁电机电磁进行优化设计,通过对动车电机整体结构的分析与电磁状态方程分析,得出转矩扰动对电机的影响结果,以此构建永磁电机电磁速度控制策略,再通过PI变增益策略结合转矩的观测与补偿,实现动车永磁电机电磁优化。
1 基于转矩补偿的动车永磁电机电磁优化方法
1.1 动车永磁电机结构
基于复合结构的动车永磁电机如图1所示,通过径向放置两种电机,可以改善内燃机转矩与转速,使内燃机的燃油效率更高[7-9]。在永磁电机内,双转子电机功率与内燃机功率相加即为最大输出功率,因此当永磁电机处于最大输出功率时,双转子电机功率和内燃机功率等级均不高于同级别的传统内燃机动车。

图1 基于复合结构的动车永磁电机
电机能量运行状态如图2所示。
由于能量流在两个电机之间传输时变化较大,会使电机间磁场出现过饱和现象,引起输出转矩波动,若永磁电机固有频率和输出转矩频率相同,则会产生谐振现象,影响电机的输出效率,因此需优化电机磁路参数,降低转矩波动对电磁的影响[10-11]。

图2 电机能量运行状态
1.2 永磁电机电磁状态方程
依据上述电机结构构建基于三相静止坐标系下的复合结构电机状态方程,分析该动车永磁电机电磁转矩特性。磁阻转矩与内、外转子的内径与外径均能够改变永磁电机的磁路参数[12],为得到精确的分析结果,作如下假设:不考虑磁滞、涡流损耗与磁阻转矩。设定子三相绕组电压为UA,UB,UC,内转子三相绕组电压为UU,UV,UW;定子三相绕组电流为iA,iB,iC,内转子三相绕组电流为iU,iV,iW;定子三相绕组电阻为RA,RB,RC,内转子三相绕组电阻为RU,RV,RW;外转子永磁体切割定子为EA,EB,EC,内转子绕组产生的反电动势为EU,EV,EW。同时设i相、j相的自感为Lii(i=A,B,C)、Ljj(j=U,V,W);i、j两相的互感为Mij;定子、内转子绕组漏电感分别为Lσ1,Lσ2。电机电压与电机磁链存在关联,还与定、转子绕组电流、各项绕组电阻存在关联,可由式(1)表示:

(1)
其中
(2)
式中:U为定子三相绕组总电压;R为电机电阻;Is为永磁电机电流;Iir为i相定子绕组电流;ψ为磁路系数;ψA,ψB,ψC分别为定子三相绕组磁链;ψU,ψV,ψW分别为内转子三相绕组磁链;Lm为每相互感;ψm为永磁体磁链。联立式(1)、(2),得到电机的电压方程为:
(3)

由公式(4)计算内、外转子的电磁转矩。内、外转子运转时,内转子与定子保存的磁动能分别为W1,W2,外转子保存的磁动能为W3;定子在内、外转子中产生的电磁转矩分别为T1,T3,外转子产生的电磁转矩用T2表示。
(4)
式中:Tor为外转子外侧转矩;Tin为内转子外侧转矩;θ1,θ2分别为外、内转子转动的角度;ψm1,ψm2分别为外转子外侧和内侧磁链;M1~M4分别为外侧、里侧电机自感和互感;pn为电机极对数。根据式(4)可知,当pn未发生改变时,内、外转子输出转矩与转子区域位置存在关联,并且当永磁体磁链发生变化时,输出转矩均会改变。因此,优化电机电磁,能够改善磁场的耦合状态[13-14],使电机装置尺寸与输出转矩扰动均能减小。
1.3 永磁电机电磁优化设计与实现
根据以上输出转矩特性分析可知,为使永磁电机电磁得到优化,需使转矩扰动减小[15],因此本文提出通过转矩补偿并配合永磁电机电磁增益PI控制策略,降低转矩扰动。
1.3.1PI变增益策略设计
在电机伺服系统中为降低转矩扰动,增加了PI变增益。永磁电机具有滤波器性质,当电机幅频值达到峰值时,其转速也升高,当电机幅频值远离峰值时,电机转速受到扰动而降低。设峰值频率为ω0,转矩扰动时峰值频率ω0的信号分量会增大,电机转速响应速度则会变慢。因此,可观测峰值频率ω0的信号分量,以此作为PI变增益的控制条件,实现对转矩干扰的控制。同时,为使峰值频率ω0不会因比例系数的调整出现改变,需调整变化积分时间常数。
由式(5)带通滤波器的计算结果能够提取峰值频率ω0的分量:
(5)
式中:Gbp(s)为峰值频率ω0的分量;s为电机幅值;Kr为谐振系数;ωc为电机角速度。
同时采用带通滤波器计算转速变量ωout,依据ωout构建PI变增益控制策略Kvg:
(6)
式中:Kv为PI控制器所设比例系数;c为转速变动率,本文设为10;ω*为转速指令值;|ωout|为过滤转速信号。带通滤波器谐振点增益与谐振系数存在关联,由Kr来表示,带通滤波器带宽与ωc相关,假如|ωout|>ω*/k,则规范比例系数可使其变化风险降低。
计算ωout与ω*/k比值,获取比例系数,若转矩存在扰动,则可以通过提高比例系数的方式抑制转矩扰动,并改善伺服系统刚性。
为保障恒定的积分时间常数与比例系数比值,进而使带通滤波器性能得到保障,计算PI控制器积分时间常数Mv的改变规则Mvg:
(7)
1.3.2转矩的观测与补偿
依据以上PI变增益控制策略,本文构建基于卡尔曼滤波器的转矩观测器[15],实时观测转矩扰动情况并进行补偿。永磁电机的运动方程为:
(8)
式中:iq为q轴电流;G为黏性摩擦系数;κ为机械角度;Md为转矩ML与摩擦转矩Gw的总和,即Md=ML+Gw;w为转动惯量;J为量化值;Kt为摩擦系数。
若在某个采样周期转矩ML为固定值,则dML/dt=0,同时知dMd/dt=dGw/dt,将式(8)离散化,由此卡尔曼滤波器输出的计算公式为:

(9)
式中:x(k),x(k-1)均为状态变量;y(k)为测量信号,y=κ;g为系统模型与参数的偏离量;v为测量器件的量化偏离量;Sx(k-1)为状态函数;Ox(k)为量化函数;Gx(k-1)为模型。式(9)的矩阵形式如下:
(10)
式中:S为系统矩阵;G为递推矩阵;O为测量矩阵;Ms为滤波增益;M为滤波信号。通常情况下,卡尔曼滤波算法可通过观测量或滤波增益矩阵实现递推运算,二者可通过并行的形式完成递推运算。
进行观测量递推计算时,需提前获知(k-1)时刻的观测结果x(k-1)与输入信号u(k-1),依据x(k)=Sx(k-1)+Gu(k-1),计算出k时刻观测结果x(k)的估计值,同时,计算k时刻测量值y(k)的估计值,得到x(k)与y(k)的偏差e(k),然后滤波增益矩阵K(k)与e(k)相乘获得x(k)估计值调整后的结果K(k)e(k),再将x(k)估计值与K(k)e(k)相加得到x(k)的真实结果。
对滤波增益矩阵开始递推计算之前,需先通过式(11)计算出x(k)估计值的误差协方差P1(k):
P1(k)=SP(k-1)SM+Q(k-1)
(11)
然后通过式(12)计算滤波增益矩阵K(k):
K(k)=P1(k)OM[OP1(k)OT+R(k)]-1
(12)
再后通过式(13)计算得到误差P(k):
P(k)=P1(k)-K(k)OP1(k)
(13)
式中:SP(k-1)为量化模型;P(k-1)为x(k-1)的误差协方差;R(·)为测量噪声矢量σ的协方差;Q(·)为扰动矢量ω的协方差。
计算完成后,将转矩Md调整为相应电流量,并通过前馈补偿调整速度环控制器发出的信号,与变增益PI控制器互相配合,改善转矩扰动的影响。
2 仿真实验
为验证本文方法对动车永磁电机电磁的优化能力,进行仿真实验,分析永磁电机电磁优化前、后各参数改变情况,分析结果见表1。根据表1可知,经本文方法优化后,电机外转子外径、内转子内径均有所增加,额定电流与定子外径均有所减小,达到了较好的优化效果。

表1 永磁电机电磁优化情况
设永磁电机转速为1 200 r/min,在电机运转至0.5 s时,修改系统负载转矩,从0 N·m增大至15 N·m,分析电机进行转矩补偿前与转矩补偿后的负载响应情况,结果如图3所示。由图3可知,转矩补偿前与补偿后均能在0.1 s时达到设定转速1 200 r/min,在0.5 s提升负载转矩时,补偿前电机转速突然降至1 000 r/min,且之后无法达到1 200 r/min,而经本文方法补偿后,电机转速在增加负载转矩时仅有小幅度波动,之后迅速恢复到设定转速。由此可知,应用本文方法能有效实现电机转速优化。

图3 1 200 r/min时负载响应情况
仍然设定永磁电机转速为1 200 r/min,在电机运转至0.5 s时再次调整系统负载转矩,从15 N·m降低至0 N·m,分析电机转矩补偿前与转矩补偿后的负载响应情况,结果如图4所示。由图4可知,未进行转矩补偿时转速突然提高,然后缓慢下降,且不能保持稳定,而经本文方法补偿后,转速并未出现大幅度波动,在0.5 s处转速仅有小幅度提升,随后恢复到设定值。由此可知,经本文方法补偿后电机转速更加稳定。
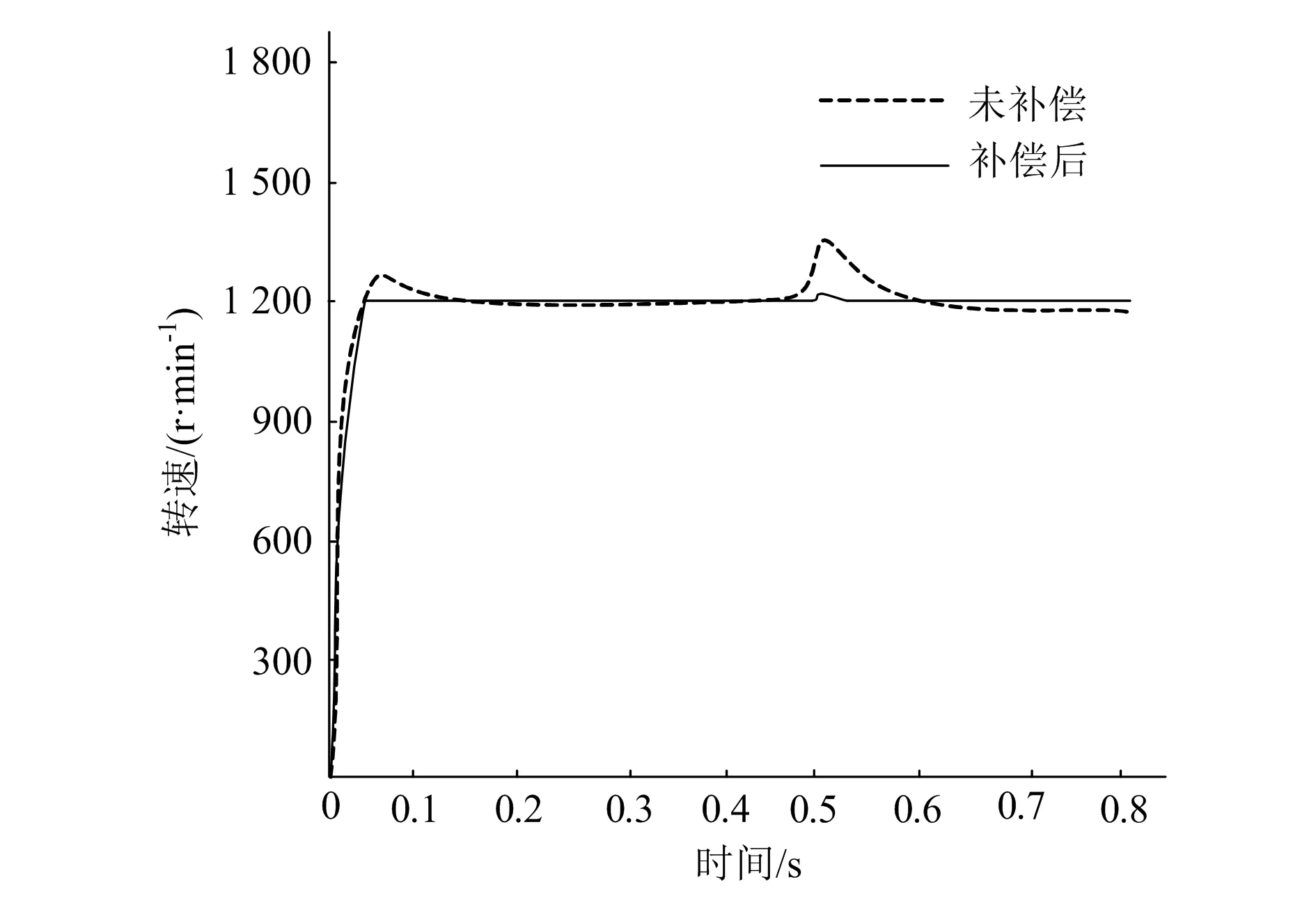
图4 1 200 r/min时负载响应情况
分析额定转速下优化前、后的永磁电机输出转矩情况,结果如图5所示。由图5可知,优化前内转子与定子绕组转矩波动幅度均较大,而优化后转矩波动幅度相对较小,说明优化后转矩较为稳定,由此可知,本文方法具有较高的永磁电机电磁优化能力。
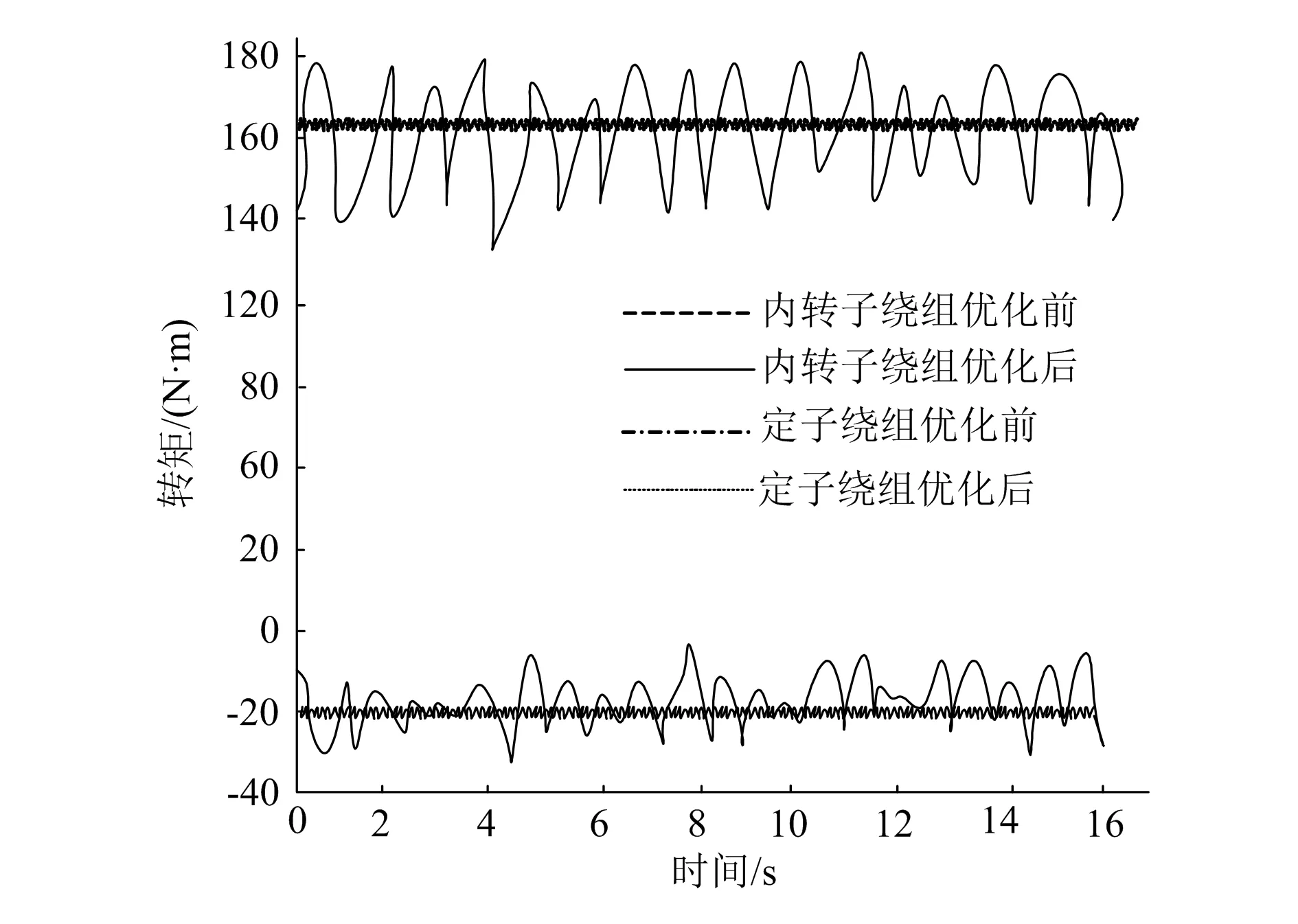
图5 转矩优化前后对比
3 结束语
本文提出基于转矩补偿的动车永磁电机电磁优化方法,通过对动车永磁电机结构的分析与永磁电机电磁状态方程分析,了解转矩对动车电机的影响,以此为基础构建基于PI变增益策略的转矩观测与补偿方法,实现动车永磁电机电磁的优化,并通过实验分析,验证该方法的性能,由实验结果可知该方法能够有效优化电机转速与转矩。未来可在现有基础上进行深入研究,以实现动车永磁电机的全方位优化。
