映射关系约束下双目视觉测量误差调整仿真
2022-05-14许恒硕
王 震,许恒硕,廉 哲
(1. 沈阳理工大学,辽宁 沈阳 110159;2. 南开大学计算机学院,天津 300270)
1 引言
立体视觉测量技术是一种基于视差原理采用多种光学成像设备从不同位置、不同角度获得物体图像,并通过计算得出不同图像间的对应点位置偏差,从而获得被测目标三维信息的方法[1]。其具有操作简单、非接触和成像速度快等特点,为机器视觉中获取物体信息的主要手段之一,已被广泛应用到物体定位、逆向工程以及机器人焊接等领域。但是由于环境噪声、光学畸变等原因可能导致测量结果产生误差,因此,对其误差进行补偿就变得尤为重要。
近几年,关于视觉测量系统的误差补偿方法较多,崔恩坤[2]等人提出了一种立体视觉测量系统标定误差补偿,该方法首先利用系统的外在结构构建测量坐标系,并引入系统误差以减小标定过程中的非一致性,随后利用相机各参数间的耦合作用对标定误差进行补偿,建立与标定参数相关的虚拟映射。实验表明该方法具有一定的可行性,但是由于不同相机的参数也有所不同,且参数数量较多,导致算法的计算量较大,且可能在计算过程中出现计算错误的概率也较大,因此,在实际应用过程中还存在较大问题。王建华[3]等人提出了一种基于相位误差自校正的高速三维测量技术。对原包裹相位进行变换后,获得第二包裹相位,随后将两个包裹相位融合实现减小相位误差的目标,最后为提高测量速度,该方法对光栅条纹进行离焦二值化处理。实验表明该方法在一定程度上提高了计算速度,但是还存在跳跃性误差的问题。石博[4]等人提出了一种基于多级条纹级数修正的相位误差校正方法。以光栅条纹的相位周期为准对条纹级数进行一级粗校正,避免伽马效应导致跳跃性误差的传递,随后进行取整函数优化,并以绝对误差相位为依据进行二级精度校正。通过校正后的条纹计算求得理想相位值,该方法能够有效地降低光栅条纹的跳跃性误差,但是由于涉及算法过多导致计算效率较低。
基于此,为更精准地提高视觉测量结果,本文提出了一种基于相位映射的立体视觉测量误差补偿方法。首先根据视觉测量原理总结出可能导致误差出现的原因,并以此为依据,通过光栅条纹的灰度均值及调制强度建立实际相位和理想相位间的映射关系,为避免过校正效应发生,设定出控制因子进行补偿,完成相位补偿,获得实际相位值。实验表明本文方法能够有效地提高测量精准度,实际应用价值较高。
2 立体视觉测量误差分析
立体视觉测量的原理如图1,其主要理论依据为视差原理,通过投影仪及两台以上摄像机收集被测目标的三维信息。

图1 立体视觉测量成像原理
若图1中左右两个图像的坐标系为O1x1y1、O2x2y2,镜头聚焦后空间中的点P通过投影仪映射成像,在图像坐标系下,两个相机点P1、P2的坐标为(X1,Y1)、(X2,Y2),此时两个摄像机的光学主点分别为o1、o2。假设两个摄像机是在同一水平直线上,首先将左侧的相机光学主点o1作为原点构建三维视觉测量坐标系oxyz,且将P置于平面oxz中,此时线段o1o2则为测量系统的基线[5],将其记作B。设两个相机的有效焦距为f1和f2,x轴与相机光轴O1o1、O2o2的夹角分别为α1、α2,相机的光学中心连线和两个相机的光轴夹角[6]为ω1、ω2,通过空间几何原理可得点P在测量坐标系中的位置如下

(1)
式(1)中,夹角ω1和ω2可以通过P1、P2的x轴坐标X1、X2和焦距f1、f2之间比值的反正切函数获得,具体计算方法如下
(2)
立体视觉测量误差主要由系统参数标定不当和实际测量环境干扰导致的。现阶段参数标定已经较为成熟,可以达到较高精度,因此,本文主要研究的是在实际测量过程中所产生的误差。P点的测量误差主要通过对坐标系三个方向误差进行均方和获得,其表达式如下

(3)
通过式(1)和式(2)对式(3)的各方向误差进行偏求导得出


(4)
通过式(3)和式(4)可以得出,如果对两个坐标系的精度要求相同,即δX1=δX2=δY1=δY2=δx,α1=α2=45°时,测量误差最小。又因为测量目标一般是在图像的中心区域,因此,为简化分析可以令y=0,ω1=ω2=0°,f1=f2=f,那么式(3)可以简写为

(5)
由式(5)可归纳出影响测量精度的主要因素如下:
1)镜头焦距f
镜头焦距f的误差体现在表达式分母上,可以通过长焦镜头使误差降低,但是如果选择不当也可能导致镜头景深过短。
2)镜头分辨率
由于被测目标的光线可能会通过镜头聚焦在图像传感器上,镜头的像点会形成直径固定的弥散斑,导致成像模糊。若弥散斑的直径大于传感器像素尺寸则会导致图像分析的精度降低,使测量误差增加。
3)镜头畸变
在实际应用中,镜头普遍存在光学畸变的情况,即实际像点和理想像点之间有差异。畸变的主要类型有以下三种,分别为:径向畸变[7]、薄棱镜畸变[8]以及偏心畸变[9],但是随着现阶段光学系统各方面的改进,在系统设计、加工和安装等阶段均能够达到较高的精度,薄棱镜畸变和偏心畸变已经基本被解决,因此可以对其进行忽略,仅考虑由投影与摄像机偏移所产生径向畸变导致的测量误差即可,其表达式如下
(6)
式(6)中,(X,Y)表示理想像点坐标,(X′,Y′)表示实际像点坐标,r表示像点与坐标系原点间的距离,即二者之间的极径,k1,k2,k3,…表示径向畸变系数。
3 基于相位映射的误差补偿
由于镜头焦距和镜头分辨率导致的误差可以通过技术手段克服,因此,本文主要研究的误差补偿目标为镜头径向畸变导致测量精度较低的情况。径向畸变为一种非线性畸变,这种非线性畸变会使得光学系统中的摄像机和投影仪间的亮度传递函数表现为非线性,从而导致系统收集到的光栅条纹与既定的余弦函数有所差异。由于投影仪给出的光栅条纹图像的相位θs(x,y)与灰度Is(x,y)为离散量,相机采集的光栅图像的相位θp(x,y)与灰度Ip(x,y)为连续的,因此可以通过线性差值法求解出x≠1,2,…,N处的Is(x,y)及θs(x,y)。由于条纹的变化只与横坐标相关,因此下文只对其x轴方向的变化进行研究。


(7)


(8)


(9)


(10)


(11)
由于反余弦的值域是[0,π],则根据式(7)求得θp(x)的值一般为非单调性的,并且不处于[θs(x0),θs(N)]范围之间,也就意味着其不符合线性差值的唯一性和单调性,因此还需对θp(x)进行进一步处理。

θp′(x)=θs(x0)+θs(1)+D1
(12)
θp′(x)=θs(x0)+θs(1)+π+D2
(13)
式中,D1和D2均为变换参数,二者的表达式分别如式(14)、式(15)所示

(14)

(15)
当相同相位值出现时,即
θp′(n)=θp′(n+1)=θp′(n+2)=…=θp′(n+k)
(16)
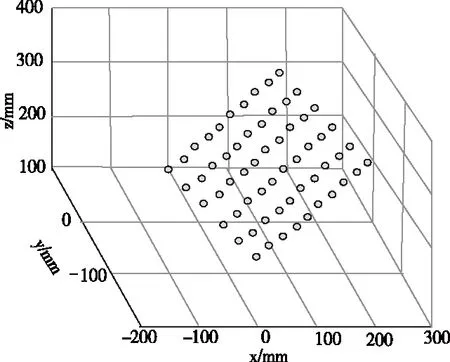
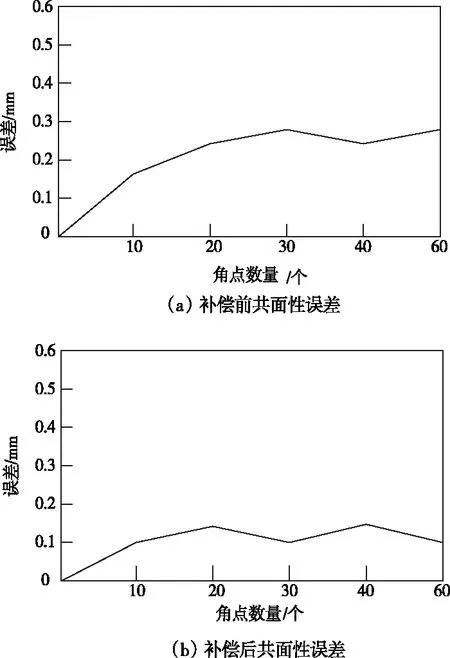
式(16)中,n θp′(n+k)=θp′(n+k)+ε(k) (17) 其中,n ε(k)=αk (18) 由于相对θp′来说ε(k)为一个小量,因此ε(k)对θp′(n)的影响接近于零。实际操作过程中,也可能会有过校正现象出现,因此还需设定出控制因子β对过校正进行补偿,其表达式如下 (19) 式(19)中,β的值大于1,其具体值可以根据测量的实际要求确定。 为验证所提方法在实际测量过程中的可行性,搭建出一套由摄像机和投影仪构成的立体视觉测量系统。系统选用的投影仪的分辨率为1280×1280pixel,摄像机的分辨率为1390×1390 pixel。 1)生成两组不同的光栅条纹,一组为4步相移条纹,另一组为48步相移条纹,二者接近于理想状态,因此可以将二者的相位视为标准相位。 2)分别向测量系统的均值白板中投放两组光栅条纹图像与一组具有单一灰度值的灰度图像,随后采集调制后的灰度图像和光栅条纹。 3)采用直方图来统计图像不同灰度值频率,并根据区域的不同对单一灰度图像进行编码。 4)将相机的区域信息投射至投影仪的靶面上,记录投影仪的分区域结果。 5)求解两组光栅条纹的相位信息,将第二组的相位信息设置为标准值,计算出相位误差。 6)设定控制因子β补偿过校正,完成相位补偿获得实际相位值。 通过上述步骤获得被测目标的具体三维信息后,提取相机和投影仪的误差补偿参数所用的标准棋盘格中的60个角点,如图2所示。 图2 标准棋盘格角点 对60个点进行拟合,使其成为一个平面,以角点的共面误差,也就是点与平面之间的距离来衡量所提方法的误差补偿效果。补偿前和补偿后的视觉测量结果分别如图3(a)和图3(b)所示。 图3 补偿前后共面性偏差分布 从图3中可以看出补偿前的共面误差平均值约为0.243mm,补偿后的共面误差平均值约为0.127mm,补偿后误差的平均值在很大程度上有所降低,由此证明了本文方法的有效性。 本文首先分析了导致立体视觉测量相位误差产生的原因为投影仪和摄像机的镜头发生畸变,因此首先求解出实际的光栅相位,随后采用线性差值算法构建了实际光栅和理想光栅的映射关系,计算出理想模式的相位分布,完成基于相位映射的误差补偿。最后通过实验证明了所提方法的可行性。该方法可以在不需要投射较多光栅条纹的情况下,不依赖复杂计算就能够大幅度提高测量精度,实际应用价值较高。但是本文的研究对象仅为双目立体测量系统,因此下一步还需要使算法适用于多目立体视觉测量系统,进一步提高算法的适用性。
4 仿真研究
4.1 实验步骤
4.2 实验结果
4 结论