V2X 技术在城市交叉口防碰撞预警中的应用
2022-05-13冯晶晶
胡 艳,冯晶晶,姚 杰
(西安培华学院智能科学与信息工程学院,陕西 西安 710125)
城市道路交叉路口是交通事故高发地区,因其分布数量多、构造复杂、场景众多,一直以来都是交通冲突防碰撞预警研究的主要对象。V2X(vehicle to everything)技术[1]是车联网最重要的技术,借助于车–车(vehicle to vehicle,V2V)、车与路侧基础设施(vehicle to infrastructure,V2I)、车与行人(vehicle to pedestrian,V2P)之间的无线通信,实时感知车辆周边状况,并及时预警,可完成车辆状态信息和交通环境信息的采集,从而实现数据共享,达到车与其他事物互联的状态。LTE-V2X 是基于4G 技术实现车车通信,以LTE 蜂窝网络为V2X 基础的车联网专有协议,因此基于LTE-V2X 技术研究城市道路交叉口防碰撞预警是当今交通安全问题中的热点领域。
现有交叉路口碰撞预警机制前提是假设车辆能够获取周围全部车辆的信息、车辆之间无遮挡和信息交互无时延。Mazda 和Honda 算法是基于车辆之间安全逻辑距离来判断车与车之间是否会发生碰撞,仅仅通过车辆自身配置不同类型的传感器来获取车辆自身及周围车辆的运动数据信息[2]。文献[1]中路侧设备单元(road side unit,RSU)与车载单元(on board unit,OBU)能够进行通信,交互信息。RSU 获取车辆速度、方向和行驶轨迹等状态信息,判断是否某个时刻车辆占用相同的网格发生碰撞,从而产生预警信息和建议速度,广播给OBU。文献[3—4]的研究结果表明,提前一秒钟给驾驶员报警能够使车辆碰撞事故率减少一半以上,说明交叉路口防碰撞的通信交互时延要求越低越好。文献[5]中路侧设备利用雷达传感器识别行人的行为预测和碰撞预测,提高脆弱道路使用者的安全性。文献[6]给出了BP 神经网络可以很好地应用于城市道路交叉口事故的预警和预测模型的分析。文献[7]讨论了V2X 通信的技术细节,并讨论了如何利用它来提高交叉口的安全性。文献[8]通过数据挖掘获取交叉口的碰撞模式,适应不同类型的交叉口,提高碰撞检测的计算速度。文献[9]提出了一种基于V2X 的道路交叉口车–车避撞预警算法,其利用基于时间差的冲突检测改进算法以及矩形和圆形碰撞检测计算车–车碰撞检测算法,提高预测正确率。首先,所有假设前提均是通过车辆本身的感知设备能够100%获取到周围车辆信息,或者RSU 能100%通信获取到周围车辆信息。该假设并没有考虑车辆遮挡、障碍物和渗透率(安装OBU 的车辆占所有车辆的比例)等,很难满足实际城市场景下碰撞预警的需求。其次,车辆之间信息交互时延过大或者车辆之间信息传递存在缺失造成碰撞预警的不准确性和碰撞预警不及时性。再次,考虑实际应用的普遍推广,车辆自身需安装多个摄像头和雷达等感知设备,这会增大车辆的成本,很难得到推广和应用。为了解决以上问题,本文提出了一种基于V2X 技术的城市交叉口协助式防碰撞预警算法。该机制通过在城市交叉口部署RSU,利用雷达和摄像头的数据进行融合,把融合后的车辆信息发给RSU;RSU 从连接的红绿灯信号机中获取红绿灯信息,从连接的云平台中获取辅助局部道路地图数据信息。RSU 把获取的各种信息通过PC5 空口利用帧听预留的资源分配方式,把信息广播给交叉口的OBU。OBU 根据从RSU 获取的信息和自身从周围其他OBU 获取的车辆状态信息进行融合,应用到碰撞预警机制中,给出预警信息。本应用能够有效解决车辆之间遮挡、车辆安装OBU 渗透率无法普及、安装车载摄像头和雷达成本高等问题,给车辆实时提供红绿灯时长和行驶建议速度,有效判断交叉口存在的碰撞风险,提高预警的准确度,减少交通事故的发生。
1 交叉口协助式机制架构
在城市交叉口中,基于LTE-V2X 技术协助式防碰撞预警的总体系统架构如图1 所示,包括RSU、OBU、信号机、业务平台、感知融合单元、毫米波雷达或者激光雷达、摄像头。

图1 协助式机制架构
RSU:部署在路侧的设备单元,汇聚路侧交通感知设备(MEC、信号灯等)和业务平台传输的数据,并将V2X 事件、交通参与者信息、地图信息和红绿灯信息等通过PC5 口广播给OBU。
OBU:安装在车辆等移动设备上,能实时感知自身位置和速度等状态信息,通过PC5 口广播给周围的OBU 和RSU。
信号机:指导交通运行的红、绿和黄信号灯,按照一定频率输出信号机信息给RSU。
业务平台:既能给RSU 提供局部交叉口的地图信息,也能与RSU 交互交通参与者信息和事件信息。
MEC:处理摄像头和雷达的数据,给RSU 输出目标物和交通事件等结构化数据。
LTE-V2X 技术的交叉口协助式机制中,RSU能够全天候综合感知路面交通状况,将车、人等周边的交通元素有效地连接起来,与OBU 形成有效通信,为交叉路口碰撞预警机制提供输入,避免碰撞事故发生。
为了规避碰撞预警发生,驾驶员采取一定的措施规避危险所需要的最短时间成为最小安全时间。最小安全时间可以分为两个部分:反应时间和控制车辆的时间。人的反应时间小于等于2 s。控制车辆的时间反映到LTE-V2X 通信端到端时延要求为[10]:车速范围 0~70 km/h,通信距离大于等于150 m,OBU 和OBU 之间以及RSU 与OBU 之间应用层到应用层系统延迟小于等于100 ms。3GPP TR22.885 明确规定在有效通信距离50 m 之内,V2X 端到端最大通信时延为100 ms,LTE-V2X 应用层正确包的接收率大于等于95%[11]。
2 V2X 应用方案
V2X 技术在交叉口协助式碰撞预警应用分为以下4 个大模块,如图2 所示。
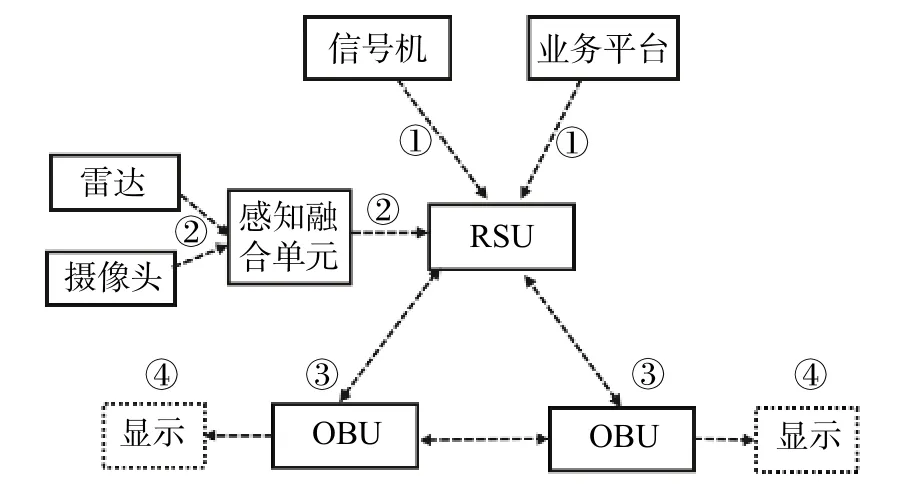
图2 V2X 应用方案示意图
1)信号相位和定时消息(signal phase and timing message,SPAT)以及地图(MAP)信息推送。RSU周期性获取交叉口红绿灯信息,广播给OBU。为了能让OBU 更加准确地获取每个车道红绿灯信息,RSU 把交叉口地图信息和红绿灯信息相匹配,广播给周围的车辆。
2)路侧感知目标物和预警事件发送。通过前端感知模块(雷达和摄像头)获取车辆信息,经过感知融合单元处理之后,输出车辆、行人和路面状况信息给RSU,RSU 广播给周围车辆。
3)车端碰撞算法和预警显示。OBU 获取红绿灯信息、地图信息、路面状况和目标物状态(位置、速度和加速度等),给端侧交叉路口碰撞预警输入信息。车辆一旦判断存在预警信息,及时提醒驾驶员,能够避免事故的发生。
4)车端建议速度显示。车端根据红绿灯信息和地图信息计算交叉口行驶建议的速度,给出建议每个车道通过交叉口的速度值。
2.1 信号相位定时消息和地图信息推送
SPAT 和MAP 推送流程如下。
步骤1,城市十字路口部署信号机,为RSU 周期性提供信号灯信息,生成SAPT 信息。
步骤2,RSU 从业务平台获取交叉口MAP信息。
步骤3,RSU 把MAP 中车道信息与SPAT 信息相匹配,把两个消息广播给周围的车辆。
对于特殊车辆(公交车、紧急车、救护车辆等)优先通行需求场景,优先通行车辆通过OBU 把请求调整红绿灯的信息发给RSU,RSU 获取请求信息之后,把反向控制红绿灯信息发给信号机,信号机控制器调整交叉口红绿灯信息,再把信号机信息传递给RSU,RSU 生成SPAT 和MAP,广播给周围车辆,从而保证特殊车辆优先通行。
2.2 路侧感知目标物和预警事件发送
路侧感知目标物和预警事件分别转为路侧安全信息(roadside safety message,RSM)、路侧交通事件和交通标志标牌信息(road side information,RSI),流程如下。
步骤1,感知融合单元目标物生成。部署路边的雷达和摄像头等感知设备实时获取周边道路交通信息,例如,行人、车辆、位置、速度等,感知融合单元把摄像头和雷达信息进行融合,进一步生成目标物的运动状态信息。
步骤2,RSM 生成。RSU 通过感知融合单元获取各种交通参与者的类型、位置、速度等感知信息,生成RSM 信息,发送给车辆。
步骤3,RSI 生成。RSU 可以通过交叉路口碰撞算法,筛选出存在碰撞风险的车辆,产生碰撞预警事件,广播给周围车辆。
2.3 车端碰撞算法和预警显示
步骤1,OBU 收到RSU 发送感知RSM。
步骤2,OBU 同步收到周围OBU 发送车辆速度、位置等运动状态信息(basic safety message,BSM)。
步骤3,OBU 从CAN 获取本车运行状态信息。
步骤4,OBU 把收到的RSM 和BSM 消息经过拟合算法,过滤掉重复车辆信息,生成车辆的运动状态列表信息。拟合算法的前提是时间同步,保证感知融合单元、RSU 和OBU 时间同步。在OBU 接收模块中,OBU 接收RSU 发送的RSM 信息,也接收OBU 发送的BSM 信息。
步骤4(a),初始化接收车辆列表为空。
步骤4(b),车辆位置的拟合。寻找时间、位置、速度和角度比较相近的点,并且对历史轨迹信息吻合度比较高的点。把接收RSU 和OBU 信息的两个点合而为一,放入到接收车辆列表中。
步骤4(c),叠加。RSU 和OBU 无法拟合点的车辆信息统一放入到接收车辆列表中。
步骤4(d),拟合结果即为接收车辆列表。
步骤5,OBU 把接收车辆列表输入到碰撞预警模块。碰撞预警模块综合所有车辆列表信息进行判断,通过交叉路口碰撞算法,筛选存在潜在碰撞风险的车辆,按照碰撞等级生成预警信息。交叉路口碰撞算法具体如下。
步骤5(a),车辆收集十字路口道路车辆运动状态信息,包括SPAT、MAP、RSM 和BSM。
步骤5(b),车辆自身结合MAP 信息,以自身位置为原点,以半径R画圆,筛选位于交叉路口左右侧以及交叉路口前后侧区域的车辆信息。
步骤5(c),根据本车与筛选区域车辆之间的距离信息,与距离门限比较进一步筛选潜在高风险车辆信息。
步骤5(d),对高风险车辆信息进行过滤,根据车辆位置、速度、行驶方向、加速度等信息,预测车辆轨迹,计算达到路口冲突区域的时间差和达到路口的距离差,时间差或者距离差小于阀值,筛选存在碰撞危险的车辆。冲突区域是指道路交叉口中,车辆运行轨迹存在相互交叉、汇合到分开的区域范围。该区域包含潜在会发生碰撞的冲突点。
步骤5(e),对存在碰撞危险的车辆进一步根据时间差或者距离差,以及车辆速度筛选最紧急的威胁车辆。
步骤5(f),根据威胁车辆的行驶轨迹给出不同预警级别,正向碰撞级别最高,侧向碰撞次之,追尾碰撞较低。
步骤5(g),系统对驾驶员进行碰撞预警提醒。
步骤6,OBU 同时收到RSU 的防碰撞预警,把预警信息提醒给驾驶员。
2.4 车端建议速度显示
步骤1,车辆读取RSU 发送的SPAT 信息和MAP信息。
步骤2,车辆根据十字路口道路停止线的距离或者交叉口中心点位置信息和红绿灯时长,能计算通过交叉路口行驶建议速度区间,给驾驶员进行提示。
步骤3,车辆根据所处车道信息和道路数据地图转向信息,给出车辆提示左转、直行和右转的提示。
步骤4,车辆根据车道所在红绿灯信息,指示车辆在交叉口停止线是等待红灯还是绿灯安全通过交叉口。
3 系统仿真
3.1 仿真说明
为了进一步论述V2X 技术在城市交叉口防碰撞预警中的应用,系统仿真平台利用Microsoft Visual Studio C++构建了城市典型的LOS 场景模拟端到端的数据传输。平台模块构造如图3 所示,分为公共模块:RSU 和OBU 分布模型、参数读取模块、感知融合单元和路径损耗;发送端:数据解析和生成、资源调度和发送模块;接收端:接收和解析以及性能统计。
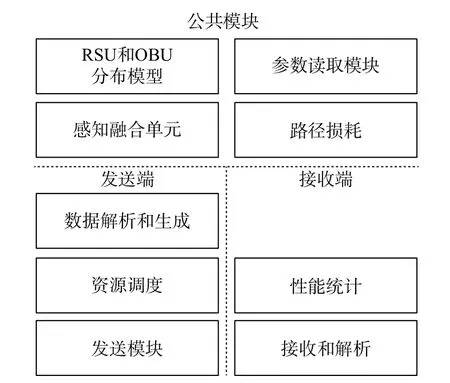
图3 系统仿真平台模块构造图
3.2 仿真场景
仿真场景为车辆分布在城市交叉口附近道路半径300 m 的道路上,如图4 所示。如表1 所示,道路为单向3 车道和双向6 车道,每个车道车辆泊松分布,以匀速度直行,达到边界之后,往返运动。

图4 交叉口车辆分布示意图
Case1 车辆分布总数171 辆车,高密度。Case2车辆分布总数81 辆车,中密度。分别构造无RSU部署车辆仅获取周围OBU 车辆运动状态信息,无法获取没有装有OBU 的车辆信息和有RSU 部署下,OBU 获取周围车辆OBU 运动状态信息,也能获取RSU 发送车辆运动状态信息的场景。
3.3 仿真条件
系统仿真参数包括公共仿真参数和城市LOS 场景下仿真参数。具体如表1 和表2 所示。

表1 公共仿真参数
3.4 包接收率分析
包接收率(packet reception rate,PRR)[14−15]为在一定距离下接收端成功解调的包数与发送端发送总包数的比值。本文是指在一定距离下接收端成功解调的包数与所有车辆期望发送总包数的比值。
3.4.1 绿灯和地图信息推送
根据表2 仿真条件可知,信号机生成的数据传输到RSU 的周期为1 000 ms。RSU 从V2X Server平台获取MAP 和读取信号机数据生成SPAT,分别以周期500 ms 和1000 ms 把SPAT 和MAP 广播给周围的车辆。
OBU接收SPAT 和MAP信息的PRR如图5所示。车辆通过SPAT 和MAP 能够获取每个车道的绿灯时长。车辆速度处理模块把速度信息输出到Pad 终端,Pad 终端显示出车辆的速度信息和红绿灯时长。

图5 OBU 接收SPAT 和MAP 的PRR
3.4.2 OBU 接收RSI、RSM 和BSM 的PRR 分析
根据表2 仿真条件可知:OBU 发送BSM 周期为100 ms,RSU 发送RSI 周期为100 ms,发送RSM周期为100 ms。OBU 既可以接收车辆之间BSM消息,也可以接收RSU 发送RSM 和RSI。为了让仿真结果更加趋近城市真实场景,一个RSU 部署在交叉口附近一侧,能够使每个方向的车道车辆均能通过LOS 路径收到RSU 发送的信息。
当所有车辆都安装OBU,渗透率为100%。由图6 可知,OBU 接收OBU 的PRR 以及OBU 接收RSU 的PRR,Case2 比Case1 可靠性高。这说明车辆分布密度越高,相互之间干扰越严重,对OBU 接收的PRR 影响越大,值就越低。在50 m范围内case1 和case2 的PRR 均大于等于95%。在距离为80 m 左右时,OBU 接收PRR 均保持在90%以上,且OBU 接收OBU 的PRR 和OBU 接收RSU的PRR 二者差值在7%之内。随着距离的增加,Case1 相对Case2 下OBU 接收OBU 与OBU 接收RSU 二者的PRR 之差更加明显,Case1 相差最大为65%。
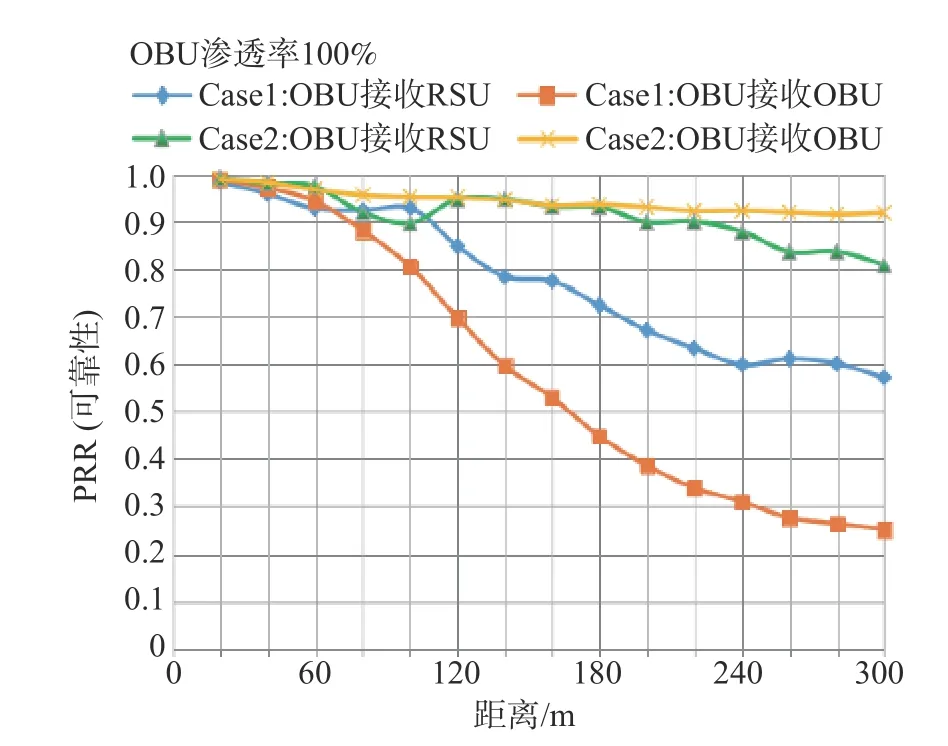
图6 渗透率100%下OBU 接收包的PRR
对于OBU 来说,OBU 接收OBU 数据和OBU接收RSU 数据二者分开处理,OBU 不做进一步的融合,所以存在接收重复的车辆信息,并且无法真实获取周围车辆的信息。
3.4.3 增强OBU 接收RSI、RSM 和BSM 的PRR 分析
OBU 不仅接收OBU 之间车辆的BSM,而且接收到RSU 发送的RSM,二者信息经过拟合算法,能够极大提高OBU 接收周围车辆的PRR,称为增强OBU 接收。
当渗透率为100%,在十字路口分布的OBU 接收到RSU 发送的RSM 数据包的PRR 为PRR_rsu,接收到OBU 发送BSM 消息数据包的PRR 为PRR_obu。车辆信息经过拟合处理,增强OBU 接收数据包的PRR 约等价:PRR_enhance=PRR_obu+(1-PRR_obu)*PRR_rsu,或者PRR_enhance=PRR_rsu+(1-PRR_rsu)*PRR_rsu。
从图6 和图7 可以看出,在渗透率为100%,Case1 和Case2 下增强OBU 接收数据包的PRR 相对于无增强OBU 接收数据包的PRR,在100 m 距离下分别提升20%和5%,在300 m 距离下分别提升42%和8%。所以,车辆分布越密集,增强OBU接收数据包的PRR,提升性能空间就越大。
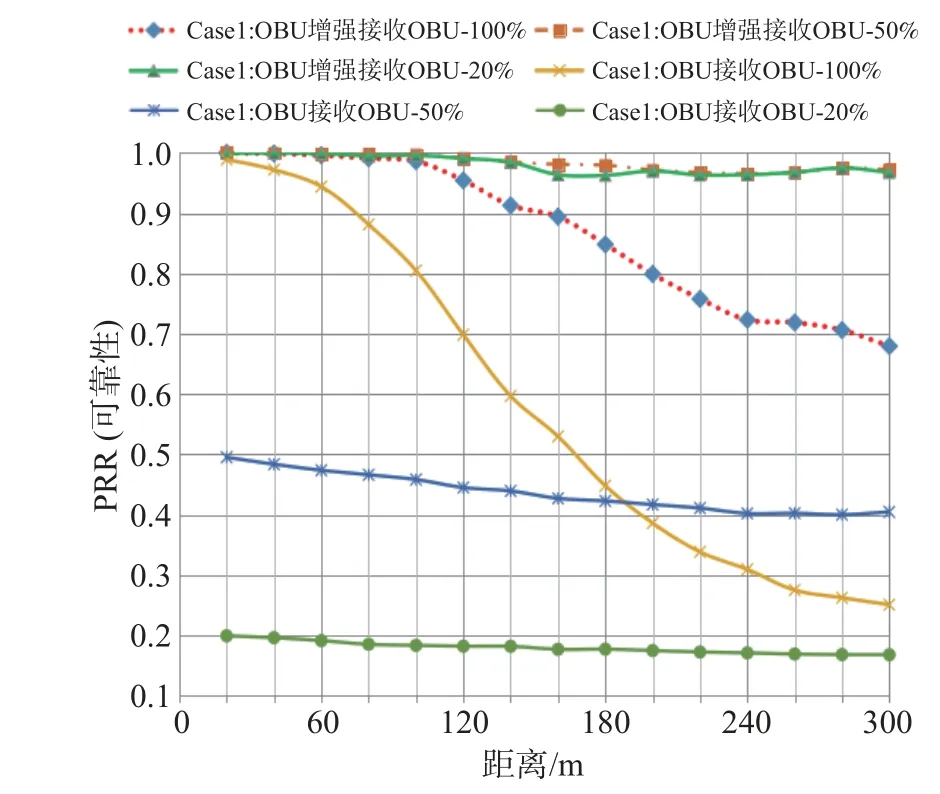
图7 Case1 不同渗透率下PRR 对比
3.4.4 不同渗透率PRR 性能分析
随路侧部署的增加和安全应用需求,OBU 渗透率会逐渐提升。当交叉口车辆安装OBU 的渗透率不高,分别为20%和50%时,可以通过在路边部署RSU,使得OBU 既能接收RSU 发送信息,也能接收周围OBU 的信息,从而减少交叉路口的碰撞的风险。
从图7 和图8 可以看出,OBU 的渗透率Percent_obu 分别为20%和50%时:OBU 接收所有车辆的PRR 不高于渗透率;当OBU 接收OBU 的距离小于等于240 m 时,Case1 和Case2 增强OBU接收所有车辆的PRR 分别达到97%和99.8%以上。因此,交叉口部署RSU,利用雷达和摄像头等感知设备,能够解决OBU 的渗透率低的问题。
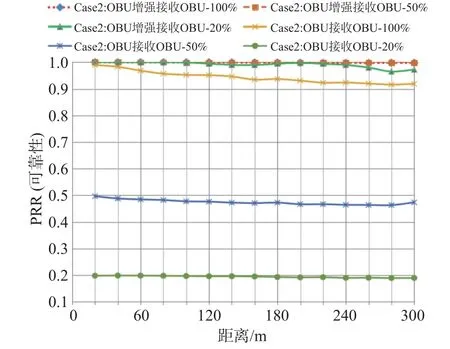
图8 Case2 不同渗透率下PRR 对比
3.5 车辆碰撞预警分析
城市交叉口车端碰撞算法利用V2X 技术,设置6 个场景,车辆密度为Case2,分别进行仿真,统计记录数据。
预警次数是指系统统计车辆显示预警而实际确实发生碰撞预警的次数。错报次数是指系统统计车辆显示预警,而实际上车辆最终没有发生碰撞的次数。漏报次数是指系统统计车辆发生了碰撞而实际没有提前给出预警的次数。
情景1,OBU 渗透率100%,OBU 接收OBU。
情景2,OBU 渗透率50%,OBU 接收OBU。
情景3,OBU 渗透率20%,OBU 接收OBU。
情景4,OBU 渗透率100%,OBU 增强接收OBU,部署1 个RSU,感知融合单元100%获取交车口车辆的运动状态。
情景5,OBU 渗透率50%,OBU 增强接收OBU,部署1 个RSU,感知融合单元100%获取交车口车辆的运动状态。
情景6,OBU 渗透率20%,OBU 增强接收OBU,部署1 个RSU,感知融合单元100%获取交车口车辆的运动状态。
从表3 可以看出,在没有RSU 部署,OBU 的渗透率无法普及的情况下,十字路口碰撞算法随渗透率降低,漏报次数增加。其原因是车辆之间只能收到OBU 的车辆信息。在OBU 渗透率为100%时,预警的正确率为91.7%;在OBU 渗透率为20%和50%时,预警的正确率分别为19.58%和50%。而在十字路口部署RSU 情况下,能够有效解决OBU 渗透率无法普及的问题,预警的正确率提升到95.6%。
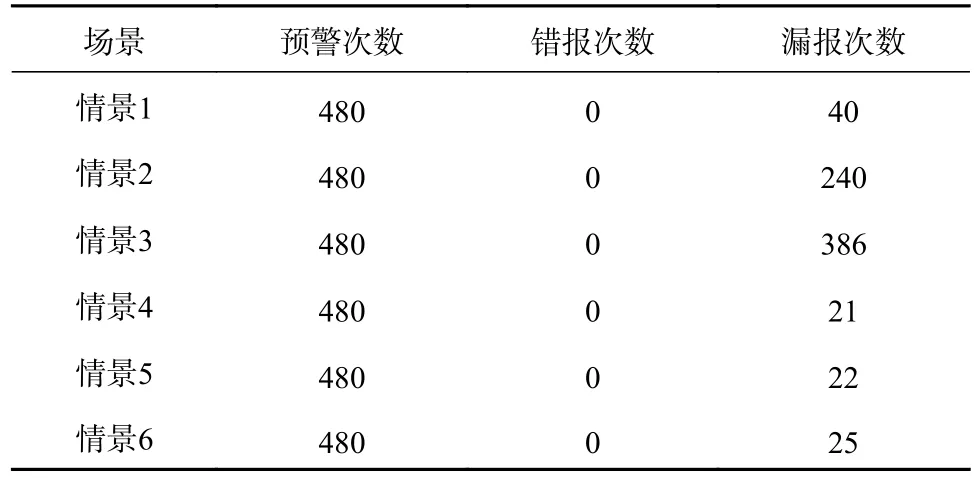
表3 车辆碰撞预警结果
3.6 时延分析
时延(delay)定义为从发送端应用层发送V2X通信数据的时刻,到接收端应用层正确解调V2X业务包的时刻,二者之间的时间差[14−15]。PC5 空口的时延定义是应用层端到端的延迟时间。文献[10]中明确说明RSU 与OBU 之间PC5 口信息交互时延小于等于100 ms,所以RSU 到OBU 应用层端到端平均时延约为50 ms。OBU 与OBU 之间通信时延参考RSU 与OBU 之间时延,应用层端到端时延小于等于100 ms,平均时延为50 ms。雷达厂家发送数据周期为50~100 ms,视频采样速率设置20 帧/秒,摄像头和雷达最大对齐时间为100 ms,感知融合单元对视频和雷达的数据进行融合,到最终输出车辆信息列表为100 ms左右,那么基于V2X技术通信,从感知融合单元到RSU,再到OBU 之间交互时延小于等于300 ms。因此,端到端时延能有效为交叉路口碰撞预警算法提供输入,提高碰撞预警的实时性。综上所述,满足时延的需求。
4 结束语
LTE-V2X 作为智能网联汽车和车联网等核心技术,正受到越来越多的研究和关注。文中提出了一种基于LTE-V2X 技术在城市交叉口协助式防碰撞预警的应用方案,既能解决单车智能遮挡无法识别问题,也解决车辆获取周围信息时延过大和接收数据包的PRR 过低问题。考虑普适性,解决车辆安装车载摄像头和雷达等成本高的问题,能极大推动OBU 的渗透率。所以,通过V2X 技术能够提高车辆接收的PRR,以更短时延获取车辆信息,实时显示绿灯时长和指导车辆建议行驶速度,从而能够对交叉口存在的潜在冲突和即将发生的碰撞情况进行实时预警,减少交叉路口交通事故的发生。
未来随V2X 通信能力的车辆渗透率不断提升,城市交叉口部署RSU 的日臻完善,LTE-V2X技术下PC5 口相互之间干扰会成倍增加,将对空口接收PRR、时延和防碰撞预警算法提出更高的要求。
