三维激光扫描技术在地籍测量中的应用研究
2022-05-11晏南
晏 南
(山西省地质测绘院,山西运城 044000)
1 引 言
传统地籍测量多为单点式测量,采用全站仪结合GNSS-RTK的测量模式,在测区范围内进行逐点测绘,其工作量大、作业效率低。在现代地籍测量中,测绘方法已经得到了较大的提升,各类先进的测量技术与方法已经成功运用到地籍测量中。随着数字化测图、摄影测量、无人机等技术的发展,地籍测量成果精度及工作效率得到了显著提升。
三维激光扫描技术又叫实景复制技术,它可以通过极高速的激光扫描快速获取大量高精度的空间三维坐标[1],然后快速利用这些点云数据实现物体模型的建立。三维激光扫描技术具有寻常测量技术难以企及的优势,如高精度、全自动、非接触性、高密度、数字化、实时动态等特点。因此,它又被称为继全球定位系统技术后测绘领域的又一次技术革命[2]。三维激光高效的地籍测量解决方案,主要是通过三维激光移动测量系统快速完成测区房屋的三维点云数据采集[3],经过精度验证后,基于高精度的点云数据进行矢量地籍图生产的综合解决方案。
本文为避免传统地籍测量过程中的诸多弊端,采用TrimbleTX8三维激光扫描仪进行测区地籍测量的外业扫描工作,获取测区点云数据,建立测区实景三维模型,并进行精度检校。研究结果表明,采用三维激光扫描技术,进行测区内的地籍测量工作,其数据成果精度完全符合规范要求。
2 三维激光扫描地籍测量
三维激光扫描外业采集数据主要有两种方式,即任意设站扫描方式和全站仪式的根据已知点建站扫描方式[4]。任意设站扫描方式通常需要布设标靶,以方便后期点云数据利用标靶进行配准和坐标转换。为了方便点云配准,标靶布设时必须保证相邻两站间至少有3个公共标靶。如果所需点云数据需要带绝对坐标,还需要进行坐标转换,要将标靶球布设到已知点上,否则不需要将其布设到已知点上[5]。而全站仪式的扫描仪根据已知点建站扫描方式采集到的点云数据带有绝对坐标信息,不需要进行配准和坐标转换。因此外业数据采集方案的制定主要是根据现场情况确定控制点布设、标靶点布设和测站点布设的位置[6]。
由于地籍测量过程中无法保证设站点为已知点,因此常采用任意设站扫描方式进行地籍测量,主要工作内容可分为3个方面,分别为点云数据采集、点云数据预处理和地籍要素提取绘制。
本文采用TrimbleTX8三维激光扫描仪进行外业数据采集工作,为保证测量数据的完整性,在外业作业时,采用360°扫描模式,每个测站的扫描时间不得低于2 min,同时相邻两测站之间的距离需严格控制,转站点不得少于4个,公共重叠区域不得低于30%。
由于研究区采用任意设站扫描方式进行点云数据采集,因此需要利用测区内已知控制点进行坐标转换,本文对测区进行控制测量,建立测区地籍测量控制网,在测块四周不易被破坏的位置布设A4幅面的标靶,并将其与测区控制网联测,获取标靶中心绝对坐标,以便后续将所测点云坐标归算至测区坐标系下。本次扫描作业共设扫描站点115个,测块四周均匀布设5个标靶。
3 点云数据处理
3.1 点云数据拼接
在进行实际扫描作业时,三维激光扫描仪各个扫描站所扫描的点云数据,均为以该设站处为原点的自定义坐标系下的测区局部数据。为了得到测区范围内完整的地籍信息,需将所有扫描站的点云数据进行拼接处理[7]。
点云数据的拼接原理是通过一定的旋转和平移,把不同坐标下的点云数据转换到统一的坐标系下,因此需要求得旋转参数和平移参数,以确定两个坐标系的转换关系。假设A、B两个点云数据集为两测站的点云数据,现将坐标系o-xyz中的A点云转换到坐标系O-XYZ中,两点云任意公共点P在A点云中的同名点是Ai(x,y,z),在B点云中的同名点是Bi(X,Y,Z)。则同名点应满足以下关系:
(1)
式中,R为旋转矩阵,T为平移矩阵,λ为比例缩放系数。由于点云数据配准只涉及旋转和平移,并没有经过缩放,是典型的刚性变换,因此λ值为1。其中:
(2)

(3)
式中:共有6个未知数,3个平移参数x0、y0、z0和3个旋转参数α、β、γ。因此要想求出这6个未知数,必须至少有6个线性方程,也就是需要至少3组不能共线的同名点对,才能求出这6个转换参数值[8]。通常情况下,为了提高转换参数精度,工作人员尽可能多选择几组同名点对。
在地籍测量过程中,以首个扫描站为基准站,将其他扫描站的点云数据依次进行拼接,确保相邻两个扫描站点之间的公共点不少于3个,使相邻两个扫描站点的点云数据点名相同的3组点对(pi,qi)满足相同的变换矩阵T。为提高转换精度,本次扫描过程中尽可能多设置公共点,以降低转换误差。
∀piP,∃qiQ,‖Tpi-q=0‖
(4)
式中:P和Q分别是相邻两个测站扫描的点云集合,pi和qi分别是点云集合P和Q中的某点。
在现实解算式(4)时面临如何查找点对和如何求解矩阵T的问题,因此,本文用所有同名点匹配后的精度评估点云拼接的好坏,即
(5)
式中:E为拼接误差。
3.2 测块点云坐标转换
在完成各扫描站点之间的点云数据拼接后,需要对拼接好的整体点云数据进行坐标转换,将其归算至测区绝对坐标系下。测块周边均匀布设了5个采用测块四周及中心的A4幅面的标靶,并与测区控制网进行联测,其中心坐标已知,测块点云转换完成后的内符合精度如表1所示。

表1 内符合精度Tab.1 Precisionofinnerconsistency点号ΔX/cmΔY/cmΔD/cm平均较差/cm中误差/cmC101.21.2C20.70.91.1C33.10.43.1C4-0.5-0.6-0.8C51.9-1.12.21.691.80
3.3 绘制地籍图
点云数据拼接完成后,需要对其进行精简。点云精简也叫点云抽稀或者点云重采样,实际上就是根据需求的点云密度对获取的点云数据重新采样,以达到消除冗余数据的目的[9]。针对点云数据精简,研究人员也提出了许多算法,使得点云精简过程更加简化且高效。
在研究过程中,采用天宝点云数据处理软件Trimble Realworks对点云数据进行精简处理,对拼接后的点云进行点云抽稀处理,建立三维实景模型,采用MicrostationV8i进行地籍要素提取工作。在Microstation软件中,可采用点云切片方式获取测区内的界址点和地物特征点,提取界址点、地物点坐标以及界址边长的地籍要素,并对其进行矢量化处理,绘制测区地籍图。研究区局部三维实景模型及矢量化地籍成果分别如图1和图2所示。

图1 研究区局部三维模型Fig.1 Local 3D model of the study area
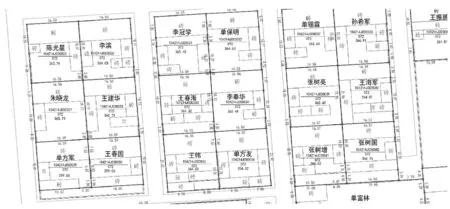
图2 矢量化地籍图Fig.2 Vectorized cadastral map
4 精度评定
地籍测量是一项非常严谨的测绘工作,其工作成果对我国的土地管理工作具有重要的现实意义[10]。因此,对地籍测量成果的精度有着较高的要求。采用三维激光扫描技术采集测绘研究区内的地籍信息。为确保测绘成果的精确性,需对地籍图的精度进行校核。本文在测区范围内选取一定数量的界址点,采用高精度GNSS-RTK对界址点进行复测,以RTK测量结果为真值,对三维激光扫描仪测绘成果进行精度分析,分别从界址点的点位坐标中误差和界址点间距中误差两个方面进行精度评定。
4.1 精度评定方法
通过查阅GB/T 14268—2008《国家基本比例尺地形图更新规范》、TD/T 1001—2012《地籍调查规程》等相关规范,可知测区范围内相邻的控制点或界址点,坐标中误差不应大于5 cm,详细信息如表2所示。
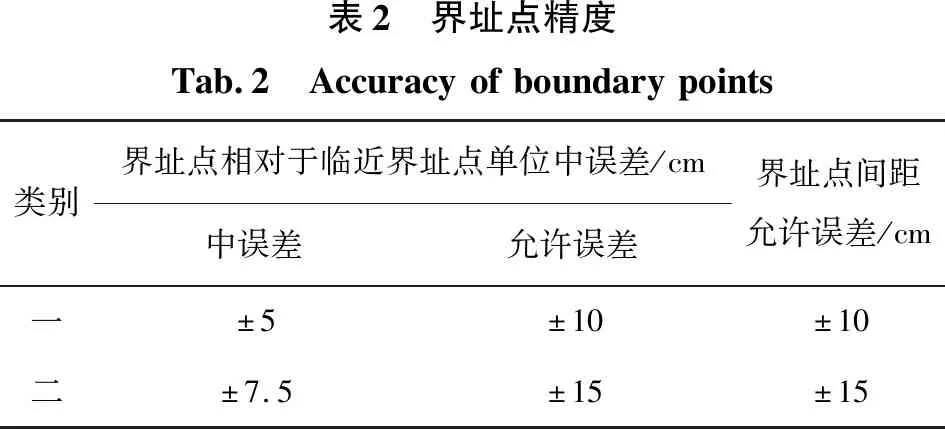
表2 界址点精度Tab.2 Accuracyofboundarypoints类别界址点相对于临近界址点单位中误差/cm中误差允许误差界址点间距允许误差/cm一±5±10±10二±7.5±15±15
在完成测区矢量化地籍图工作后,对地籍图成果精度进行分析评定,以测区内检核点坐标值为真值,以矢量化地籍图上与检核点所对应的点位为测量值,分别计算各点位平面中误差和高程中误差,对矢量化地籍图进行构建得到的模型进行点位精度分析。中误差计算公式如下:
(6)
式中:ΔX为平面坐标X方向的坐标差值,ΔY为平面坐标Y方向的坐标差值,ΔZ为Z方向的坐标差值,n为测区范围内的检核点数量。
地籍图成果的平面位置中误差可根据X、Y方向的中误差进行计算,其公式如下:
(7)
4.2 精度评定结果分析
为确保界址点点位精度检验的科学性和准确性,本次研究按“均匀分布”的原则,在测区范围内共选取200个不同地物类型的界址点进行地籍图成果精度评定。在三维激光扫描仪地籍测量成果上提取对应的界址点坐标,与GNSS-RTK测量成果进行差值计算;同时采用全站仪、激光测距仪以及精密钢卷尺等测绘仪器对相邻界址点之间的平距进行精确测量,取3次独立测量结果的平均值作为真值,将其测量结果与矢量化地籍图上量测的边长进行综合比对,检验矢量化地籍图的地物相对精度。矢量化地籍图精度检核结果详见图3。其中,图3(A)为平面位置中误差分布图,图3(B)为高程中误差变化曲线,图3(C)为相对地物距离中误差变化曲线。

图3 三维激光扫描成果精度分析Fig.3 Accuracy analysis of 3D laser scanning results
通过对利用三维激光扫描技术获得的地籍图进行精度评定可得,所选界址点的平面位置中误差为3.62 cm,高程中误差为4.77 cm,以及界址点间距的相对精度中误差为4.18 cm,均小于5 cm,满足GB/T 14268—2008《国家基本比例尺地形图更新规范》、TD/1001—2012《地籍调查规程》等规定的不大于5 cm的要求。由此表明,采用三维激光扫描技术对测区进行地籍信息的测绘工作,其测绘成果精度可以达到厘米级,精度较高,符合地籍测量国家标准的精度要求。三维激光扫描技术为大比例尺地籍测量提供了一种高效率、高精度、高性价比的新型测试方法,大大弥补了传统地籍测量方式的不足。
5 结束语
地籍测量作为我国土地信息管理的基础性工作,其测绘成果的精确性、时效性、可视性均具有较高的要求。本文针对传统地籍测量方式的工作量大、作业效率低、作业过程不具备可追溯性等弊端,采用三维激光扫描技术获取测区范围内的点云数据,采用Trimble Realworks对点云数据进行预处理,利用Microstation提取测区地籍要素,绘制地籍图;并在测区内选择200个界址点作为地籍图精度检核点,利用高精度GNSS-RTK获取检核点坐标,分析评定地籍测绘成果的平面中误差、高程中误差以及地物间距中误差。经验证,采用三维激光扫描技术得到的测区地籍图,其精度满足我国地籍测量规范要求,为我国地籍测量的发展提供了一种新的技术手段,具有一定的实用价值。
