三维激光扫描仪在梅山铁矿井下实体测量实践
2022-05-08戴竹东
戴竹东
(南京宝地梅山产城发展有限公司矿业分公司)
随着梅山铁矿数字化智能矿山建设的不断推进,三维激光扫描技术作为新型测绘技术被引进到矿山的测量服务中,在矿山井下三维实体数据采集、风水管走向测量、地面各种矿仓体积测量以及尾矿库的库容测量等方面得到高效应用。但是由于三维激光扫描仪本身的数据采集以及解算的方式存在缺陷,在井下巷道实体测量时会出现巷道形状扭曲、变形的情况,为了解决这一问题,进行了一系列的试验[1-7]。
1 三维激光扫描技术原理及工作流程
1.1 技术原理
三维激光扫描测量系统的工作过程实际上就是一个不断重复的数据采集和处理的过程。它利用激光测距原理,采用非接触式高速激光扫描测量方式,大面积、高分辨率地获取地形或复杂构筑物表面的高精度三维坐标数据以及大量空间点位信息,通过后处理软件对采集的点云数据和影像数据进行处理分析,转换成绝对坐标系中的三维空间位置坐标或者建立结构复杂、不规则场景的三维可视化模型,表达系统对目标物体表面的采样结果。这种技术采集数据既省时又省力,同时点云还可输出多种不同的数据格式,作为空间数据库的数据源以及满足不同应用的需求。三维激光扫描技术可以将现实场景以点云形式1∶1呈现在计算机中,所以又被称为实景复制技术。
三维激光扫描测量是不间断地对物体表面进行扫描,所采集到的物体表面各特征点云数据表达的是物体的空间位置信息,这个三维点云数据是以扫描坐标系为基准的。扫描坐标系定义:三维激光扫描仪启动作业的位置为坐标原点,位于激光束发射处,扫描仪的理论竖直轴(水平时的天顶方向)为Z轴,扫描仪水平转动轴的零方向为X轴,Y轴与X轴和Z轴构成右手坐标系。对于单个采集点,原点到被测点的距离为S,扫描仪测得的水平和竖直扫描角度分别为a和b,则被测点在扫描坐标系中的坐标表达见图1。
1.2 井下实体数据采集流程
1.2.1 数据采集定向控制点确定
手持式三维激光扫描仪在井下进行巷道三维模型数据采集时,需要在3~4个已知控制点上挂定位标靶球或是标靶杆。其中,悬挂标靶球需要人员登梯作业,人员根据巷道高度选择合适的人字梯,登梯到合理位置,再利用标靶球上的磁铁将标靶球吸附在控制点的铁钉上,确保稳固。如此重复挂好其他几个控制点后,方可进行数据采集作业。挂标靶杆则不需要人员登梯作业,作业人员只需要根据控制点所在的巷道高度,将标靶杆拉升到合适的位置,再将标靶杆顶住控制点且竖直立在控制点下方。但是,这种方法需要多人配合作业,且控制点坐标配准精度没有挂标靶球配准精度高。在进行井下巷道实体三维数据采集时,作业人员要着重对定位标靶球或标靶杆进行重复扫描,以确保对标靶球或标靶杆所采集数据的密度,方便内业软件处理时的标志拟合,从而确保内业三维建模定向定位数据的精度。
1.2.2 数据采集路线确定
作业人员明确任务要求后,要设计数据采集的行进路线,选择一条路径最短、重复路段最少、采集面最广的路线进行数据采集。采集数据过程中,人员手持仪器要尽量保持匀速行进,同时避免仪器的大幅抖动。
1.3 数据处理流程
三维激光扫描仪采集到的点云数据是一个三维的点云数据集,包含了较多的“飞点”,即悬浮于被采集对象表面之外的点,或是带有错误信息的点。此外,还含有大量的冗余信息,有用的点云数据和无用的冗余数据混合在一起,不利于建模。因此,在后处理软件上进行三维建模前,必须进行必要的数据处理,包括数据过滤、数据分类、标志拟合、点云拼接、坐标匹配、三维建模等,见图2。
2 三维激光扫描技术在井下实体测量的问题分析

目前,梅山铁矿井下采准作业水平涉及-303,-318,-330,-348,-366,-384 m 等6 个中段水平,对每个中段水平的采准巷道在掘进一段后都要进行实体测量,以确保及时更新各个中段水平的横剖面验收巷道图。传统实体测量方法不仅劳动效率低,而且建立的三维模型精度也低,所以引进了先进的三维激光扫描技术,以期减小井下实体测量的工作强度,提高作业效率和效果。
2.1 存在问题
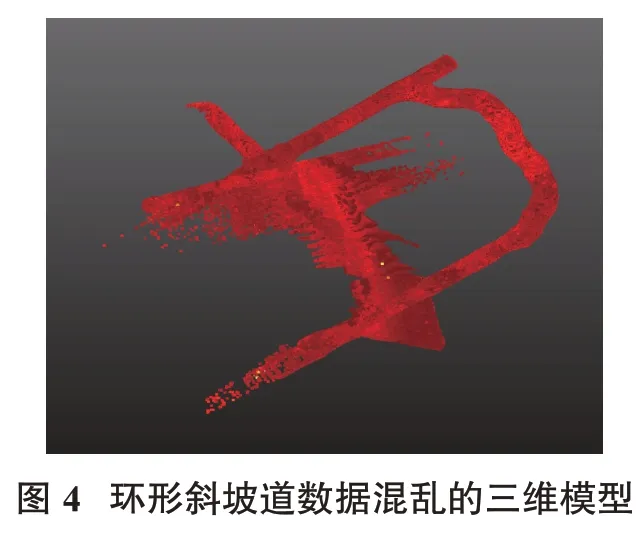
经过1 a 的井下巷道三维数据采集实践,发现三维激光扫描仪在井下采集过程中存在一些问题:①井下井字形巷道数据采集有时会出现点云数据相对位置错乱的情况(图3);②井下环形斜坡道数据采集时会出现点云数据相对高低位置识别不清的情况(图4);③井下长距离斜坡道数据采集时会出现点云数据错误,读不出数据的情况(图5)。经过多次试验,以及与厂家进行仪器性能的沟通,总结认为出现问题的主要原因可能是井下巷道相似程度很高,三维激光扫描仪在井下测量有时无法识别到有效的特征点,导致采集的点云数据出现混乱、错误。出现上述问题的数据都无法正常使用。

2.2 解决办法
针对上述三维激光扫描仪采集数据时出现的一些问题,通过针对性试验,从数据采集的方法以及行进路径方面进行调整,具体的解决措施可总结为分段式采集数据、闭合式采集数据、配合式采集数据。

(1)分段式采集数据。为了提高扫描精度,避免出现上述问题,可以根据被扫描巷道范围的大小确定是否分段进行数据采集,一般合适的分段范围是2条联络道与4条进路之间,约76 m×80 m的范围。分段的同时要确保每段控制点数在3~4 个。每个测段时间需要有1~2个公共控制点,以便于内业数据处理的测站拼接。
(2)闭合式采集数据。由于井下巷道成“井”字型结构,且巷道规格及巷道内部构造相似,巷道与巷道之间的特征点不明显,而三维激光扫描仪的工作原理里最重要的就是采集特征点,所以三维激光扫描仪在进行数据采集时容易“迷失方向”,导致数据错乱。经过几次试验证实,采用闭合式采集数据可以解决这一问题。所谓的闭合式采集数据,就是采集数据前设计1条闭合的回路作为采集路线,手持仪器从起点开机开始扫描采集数据,最后沿着设计的回路采集完数据重新回到起点,关闭仪器。此方式很好地契合了仪器本身的设计原理,填补了仪器的设计缺陷,能够使仪器更加准确地识别所采集数据的相对方位。
(3)配合式采集数据。由于井下巷道特征几乎相同,缺乏特征物的巷道更是难以分辨。为了使各条巷道特征更加明显,可以在采集数据前对所测巷道放置特征物件,放大巷道的特征属性,使仪器能更好地识别巷道相对位置。这样仪器在采集数据时能够采集到更多的特征点数据,辅助识别巷道之间的相对位置,降低出现混乱数据的几率。
2.3 成果分析
通过以上措施的开展,可以采集到比较满意的巷道特征点云数据。采集到的点云数据利用内业处理软件进行抽希、分类取样等处理步骤后,就可以得到所需要的实体三维数据,如图6所示。再进行标志拟合、坐标配准等步骤就可以将相对坐标系的三维点云数据转换为绝对坐标系的三维点云数据;然后构建三角网、建模处理就可以得到精确的井下巷道三维实体模型,提供给设计部门做相关设计使用。

3 结语
三维激光扫描仪在梅山铁矿井下巷道实体数据的采集中,作业人员只要在规程指导下操作仪器,同时结合需测巷道的实际情况选择遵循分段式、闭合式或配合式采集数据的方法,就可以得到高效、准确的三维点云数据,从而绘制出精确的巷道三维实体模型。此外,三维激光扫描技术作为一种先进的测量技术,在很多行业都已经成熟使用,但是在矿山井下应用还处于一个再实践、再探索的阶段,难免会出现一些新的问题,将继续优化仪器操作规程,掌握仪器操作技巧,积极与厂家协作,促进技术进步。