一种面向低轨遥感星座的路由任务规划算法研究
2022-05-06齐星柳震梁家辉肇启明刘畅
齐星,柳震,梁家辉,肇启明,刘畅
(航天科工集团第三研究院航天科工海鹰卫星运营事业部,北京 100071)
0 引言
近年来,低轨星座以其发射成本低、距离地面近、传输时延短、路径损耗小、数据传输率高等优势,在通信、遥感、导航和预警等众多领域备受青睐[1-8]。由于低轨卫星相对地球高速运动,因此在缺乏有效的空间网络支撑的情况下,低轨卫星的数据传输必须依赖地面站进行中继。现有的遥感卫星数据传输(简称“数传”)任务采用弯管式的周期性、批处理过境的下传方式。而随着遥感需求的增加和卫星制造技术的成熟,地面站建设的步伐远远滞后于在轨卫星数量的增长,地面站资源不足、卫星过境时间短等问题严重制约了遥感卫星的服务能力,难以满足社会对遥感信息获取的实时性需求[9-10]。随着星间链技术的发展,将多颗卫星互联互通,建立与地面系统低耦合的卫星网络,不仅可以提升系统数据传输的时效性,还可以提升整个系统的抗毁性、自主性、机动性和灵活性[11-13]。然而考虑低轨卫星的运动使整个卫星网络拓扑不断变化,且星地之间高速移动,这对低轨卫星路由策略的设计提出了挑战。
目前,低轨卫星网络路由算法主要分为动态拓扑路由、基于快照序列的路由和虚拟节点路由三大类。动态拓扑路由算法根据实时的卫星网络拓扑进行路由计算,具有实时性高、适应性强的优势,但频繁交换拓扑信息和更新路由信息将给系统带来较大的开销。文献[14-16]均采用基于快照序列的路由,将动态拓扑通过时间离散转化为多个单独的拓扑快照,每个拓扑快照内的拓扑稳定不变,针对不同快照进行相应的路由计算。文献[17-18]采用虚拟节点路由,将初始状态下的卫星节点投影定义为虚拟节点并配置独立标识,卫星运动过程中将距离最近的虚拟节点标识作为卫星标识,以屏蔽卫星网络拓扑的高动态性。
与通信星座路由规划初衷不同的是,遥感星座的路由规划主要用于将拍摄的遥感数据尽快传输到地面并进行数据处理,地面站应该作为路由的目的节点。遥感卫星的路由规划基于遥感卫星成像任务规划结果[19-20],成像任务的时长和镜头载荷种类决定了源节点携带的数据量大小,路由任务规划并非不可预测,在已知数传任务序列的情况下,非占用链路的状态变化并不会影响路由结果。因此,本文基于快照序列的拓扑划分思想,将卫星与地面站之间的路由看作低轨遥感星座路由的一部分,并提出了一种基于遥感任务调度规划结果的路由任务规划算法。
1 路由任务规划算法
低轨卫星的相对运动使卫星之间的连接状态被看作以时间为变量的周期函数,而卫星相对地球的运动使地面站节点与低轨卫星网络之间构成了一个大的时变网络。本文利用基于快照序列的拓扑划分思想,将低轨卫星星座和地面站共同组成的时变网络拓扑进行时间切片,并在每个时间片内进行从卫星节点到地面站节点的路由计算。为了减少路由切换的频率、降低链路切换的代价损失,本文将数传任务占用链路状态不变的相邻时间片进行合并,在确保路由路径可达的基础上尽量不频繁地切换路由,为数传任务寻找相对最短的路由路径。
1.1 拓扑的快照序列划分
将卫星节点和地面站节点共同构成一个大的网状拓扑结构,利用卫星星历信息预报卫星运动规律,为每个星间链路计算两卫星节点间的俯仰角、方位角、距离和相对角速度,根据星间链载荷的跟踪能力判断星间链路是否可用,根据卫星与地面站的最优建链策略时星地链路的可用情况,构建包含卫星节点和地面站节点的邻接矩阵,并基于邻接矩阵随时间的变化对随时间动态变化的网络拓扑结构进行时间切片,每一个时间片内都对应一个相对稳定的网络拓扑结构。拓扑的快照序列划分示意图如图1所示。

图1 拓扑的快照序列划分示意图
1.2 星地最优建链策略
本文考虑多星多站的星间星地共同组网路由,星间链路对应的两端卫星节点固定,因此只需要判断星间链路的通断状态;星地链路对应的卫星节点固定,而地面节点不固定,在地面站同时可见多颗卫星的情况下认为可通过增加地面站天线避免冲突,但卫星对多个地面站出现可见时间窗口重叠的问题,必须利用冲突消解方法进行求解,一颗卫星在同一时间段只能选择一个地面站接入。星地最优建链策略流程如图2所示。

图2 星地最优建链策略流程
利用卫星的星历信息、各地面站的位置信息、起始计算时间tstart、结束计算时间tstop、天线接收的最低仰角Emin计算得到卫星过境时段。具体计算方法如下。
步骤1对于低轨卫星,地面站天线可捕获范围不超过卫星轨道的四分之一,如果在起始计算时刻卫星已处于地面站可建链范围内,此时需要回退到卫星未进入天线捕获范围之前的某个时刻t1才可计算得到这一圈的完整时间窗口,因此,可选择回退四分之一轨道:

其中,tstart是起始计算时间,单位为分,meanMotion 为卫星的平均运动速度,单位为圈/天。
步骤2判断卫星当前仰角是否高于约束的最低仰角,如果高于最低仰角,说明此时卫星在地面站的可建链范围内,则以60 s的步长不断推进时间,直至当前仰角低于最低仰角,说明卫星已离开天线可捕获的范围。为了能够更快地找到下一圈的进站时间,在卫星出站时刻tout加上四分之三的轨道时间,得到计算下一个时间窗口的起始计算时间t2:

步骤3如果卫星当前仰角低于约束的最低仰角,说明此时卫星还未到达地面站的可建链范围内,则开始计算进入天线捕获范围的时刻,以60 s的步长推进时间,当仰角等于或超过最低仰角时,表明此时已进入天线的捕获范围内,记录当前时间tin。
步骤4步骤1~步骤3以60 s的步长计算进站时间,主要目的是减小系统的计算复杂度,当计算得到大致的进站时间之后,为了更精确,回退60 s,以1 s的步长推进时间,直到卫星当前仰角再次等于或超过最低仰角,同时更新进站时间tin。
步骤5在进入地面站可建链范围后,开始计算卫星离开地面站覆盖范围的时间。以30 s的步长推进时间,同时将每次推进后的时间与最初输入的结束计算时间进行比较,如果未超过结束计算时间且当前仰角还在覆盖范围内,则继续推进时间;如果超过结束计算时间,则立即结束计算。在计算过程中比较每一次的仰角大小,计算完成后输出卫星过境时的最大仰角Emax。
步骤6类似步骤5,为更精确地计算卫星的出站时间,回退30 s,以1 s的步长推进时间,直到卫星当前时间超过结束计算时间或当前仰角再次超过最低仰角,同时更新出站时间tout。
步骤7判断当前时间是否超出了结束计算时间,如果未超出,说明此次计算的卫星过境时段在任务要求范围内,可正常输出;如果当前时间超出了结束计算时间,说明此次计算得到的卫星出站时间不在任务要求范围内,此时应该以计算得到的进站时间和结束计算时间作为一个时间窗口进行输出。
步骤8每计算出一个时间窗口,将输出的进站时间与结束计算时间进行比较,如果进站时间超过了结束计算时间,则此组结果作废,并立即结束计算;如果未超过,则更新下一次计算的起始计算时间,从步骤2再次开始计算。
步骤9一颗卫星在某一时段可能会处在多个地面站的天线捕获范围内,但是由于卫星在一个时段内只能和一个地面站建立星地链路,因此需要构建卫星与地面站的最优建链策略。比较卫星和不同地面站的建链/拆链时间窗口长度,如果有冲突时段,则选择与时间窗口长度更大的地面站建立星地链路,以此消解冲突。
1.3 路由任务规划算法
在每个时间片内对应一个相对稳定的网络拓扑结构,在此网络拓扑结构下,由于卫星与地面站建立的最优建链策略将星上路由的最后一跳卫星节点与地面站绑定,因此计算携带数据的源卫星节点到与地面站建立最优建链的卫星节点之间的路由即可得到最优的星地路由。路由任务规划算法流程如图3所示。

图3 路由任务规划算法流程
本文暂不考虑带宽、误码率以及时延等因素,假设星间链路、星地链路每一跳的传输代价相同。由于当前成熟的星间链路载荷速率远远小于星地链路速率,本文设计每条星间链路同一时刻只为一条数据流提供数传服务。具体策略如下。
步骤1定义所有在遥感任务规划结果中获得成像任务的遥感卫星节点对象集合为A,A集合中节点对象包括该卫星节点ID、该卫星执行完成成像任务的时间点和此次任务产生的遥感数据量。
步骤2遍历时间片序列,并在起始时刻更新S矩阵和D集合。S矩阵定义为已完成成像任务但没完成数传任务的遥感卫星节点集合,包含卫星节点ID和卫星节点待传数据量Si。D集合定义为当前时间片内具有满足约束条件的对地时间窗口的遥感卫星节点集合,包含卫星节点ID和卫星节点对地面站的可见时间窗口Tj。
步骤3利用该时刻的邻接矩阵M构造无向图G=(V,E),其中V包含所有遥感卫星节点,E包含每个节点与节点之间的边。当星间链路可用时,默认节点与节点之间的边权重为1;当星间链路中断时,默认节点与节点之间的边权重为无穷大。
步骤4遍历集合D中的每一个卫星节点j,首先判断j节点此刻是否存在于集合S中。若存在,说明可对地下传数据的卫星本身也有数据需要下传,则卫星先为自己下传数据,下传数据量为dataSizeByGround,并更新S和D矩阵。dataSizeByGround定义为:

其中,Tj是j节点的时间窗口,单位为s,Vg是星地链路速率,单位为Mbit/s。
步骤5若不存在,则循环遍历集合S中的每一个卫星节点i,以节点i为信源,以节点j为信宿,利用最短路径优先算法找出一条跳数最小的路径(path)。若存在一条最短路径,则节点j为节点i对地下传数据量dataSizeBySatellite,更新矩阵S和D,并在网络拓扑图中删除此路径,进而更新无向图G。进入下一次循环,直到节点j的数据量Dj为0时,结束循环。dataSizeBySatellite定义为:

其中,Tj是j节点的时间窗口,单位为s,Vs是星间链路速率,单位为Mbit/s。
步骤6每次从一个时间片切换到下一个时间片,判断上一个时间片内的每条最短路径中的星间和星地链路状态是否发生变化,如果没有发生变化,则将两时间片合并,保留该path并更新S和D矩阵,在网络拓扑图中删除此路径后更新无向图G。重复步骤2~4,直至所有节点数据传输完成或时间序列遍历结束。
2 仿真设计及结果分析
2.1 仿真模型
本文构造了一个搭载SAR(synthetic aperture radar,合成孔径雷达)载荷的Walker构型遥感卫星星座。将轨道高度设定为562.22 km,轨道倾角为97.65°,构建15个轨道面,升交点赤经分别为0°、24°、48°、72°、96°、120°、144°、168°、192°、216°、240°、264°、288°、312°和336°,每个轨道面均匀分布16颗遥感卫星,相邻轨道面同位置的卫星相位差为5°。每颗卫星上有4个星间链路天线和一个星地链路天线,星间链路天线用于与相邻4颗卫星建立星间连接,星地链路天线用于与地面数传站建立星地连接。分别沿经纬方向设计星间链路,生成网状拓扑结构,随着卫星的在轨运行,计算星间相对距离、角速度、俯仰角和方位角,根据这些参数的约束值判定星间链路的通断状态和权值,并更新到邻接矩阵中。地面站选择我国国境区域内的乌鲁木齐站区、郑州站区和常熟站区,每个站区配置10副天线,该3站区过轨机会较多并符合建站条件。
2.2 仿真参数设置
设置两组实验,分别配置不同的异轨星间链搭载规模。两组实验星间链配置示意图如图4所示,第一组实验每个轨道选取4颗星(位置分别为第1位置、第5位置、第9位置、第13位置)搭载异轨星间链,全网配置同轨星间链,第二组实验全网配置同轨、异轨星间链,每组实验分别仿真传统遥感卫星弯管式数传和基于本文路由任务规划算法的数传情况。根据调研现有的成熟星间链载荷参数并结合星座构型的设计情况,设置星间链路约束项为距离不大于3 000 km,配置星间链载荷的俯仰角为−14 °~+14 °,相对运动角速度不大于0.2 °/s,星间链路数传速率为200 Mbit/s。其中,同轨星间保持相对较为稳定,约束方位角范围为−10 °~+10 °,异轨星间相对方位角变化较大,根据载荷调研结果约束方位角范围为−75 °~+75 °。星地可见时间窗口约束项为最低仰角不小于5 °,星地链路数传速率为900 Mbit/s。
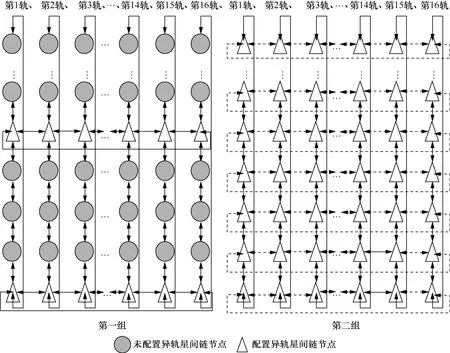
图4 两组实验星间链配置示意图
选取福建省作为遥感星座的观测目标区域,为简化仿真配置项,假定仅采用星座的前三轨用于观测,所有卫星可作为中继节点完成路由。利用STK(Satellite Tool Kit)仿真计算该星座前三轨在一天内(开始时间:2023年1月1日00:00:00,结束时间:2023年1月2日00:00:00)对福建省的覆盖情况,输出的240 颗卫星在一天内满足侧摆条件的可成像时段统计报告,结合SAR载荷条带模式(幅宽为30 km,分辨率为3 m)下每秒成像产生的数据量为1.12 GB,得出遥感任务调度规划结果,见表1。根据以上约束项和遥感任务调度规划结果,分别对两组实验进行一天(开始时间:2023年1月1日00:00:00,结束时间:2023年1月2日00:00:00)的路由仿真。
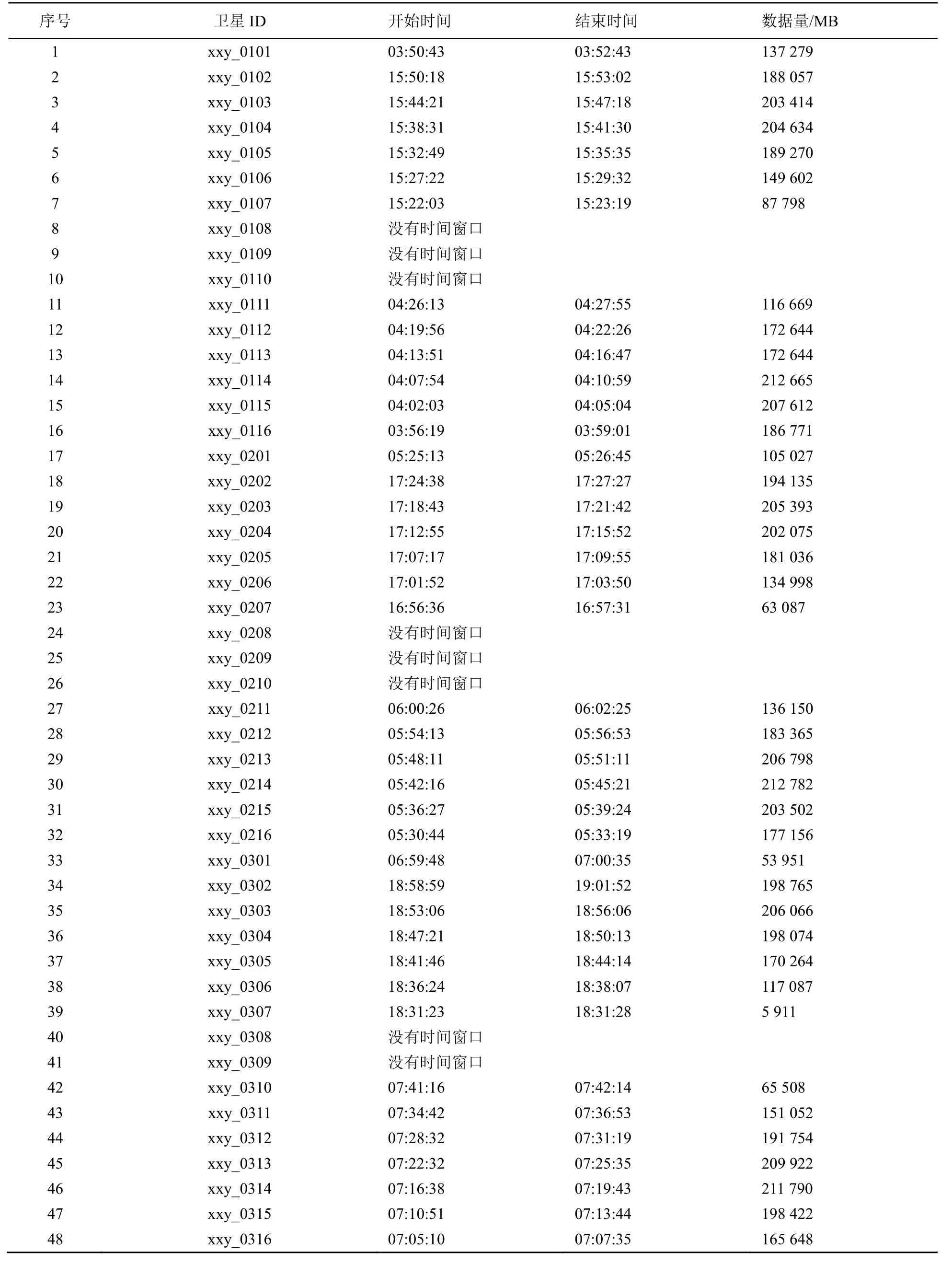
表1 遥感任务调度规划结果
2.3 仿真结果
每轨选择4颗星配置异轨星间链的拓扑下两种策略的数传量(速率)对比如图5所示,由第一组实验结果可知,基于本文路由任务规划算法的数传速度明显高于基于传统遥感卫星弯管式数传的数传速度。基于本文路由任务规划算法,星座在2 h内完成全部遥感数据的对地数传,而基于传统遥感卫星弯管式数传方法则再需要额外30 min左右才能完成全部数传任务。本文提出的路由任务规划算法能够显著提升低轨遥感卫星星座的数传能力。
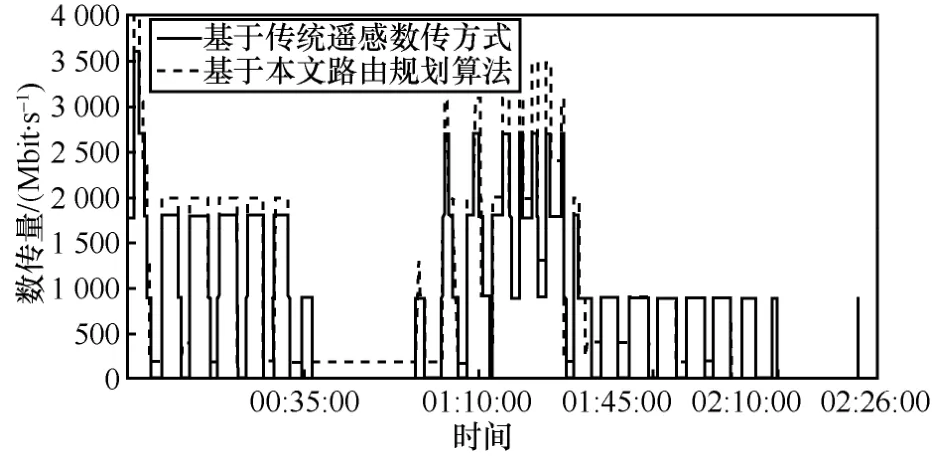
图5 每轨选择4颗星配置异轨星间链的拓扑下两种策略的数传量(速率)对比
第一组实验拓扑的星间链路配置规模较小,第二组实验设置全网配置星间链,其他参数与第一组实验完全相同。全网配置星间链的拓扑下两种策略的数传量(速率)对比如图6所示,由第二组实验结果可以看出,异轨星间链的配置规模的扩大对遥感星座的数传速率影响很大,全网配置同轨星间链的拓扑在1.5 h左右即完成全部遥感数据的对地数传,其数传能力约为每轨选择4颗星配置异轨星间链的1.5倍。
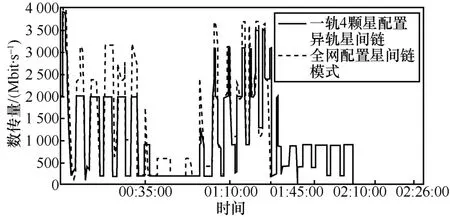
图6 全网配置星间链的拓扑下两种策略的数传量(速率)对比
3 结束语
本文针对遥感卫星星座的数传任务能力不足、观测数据对地下传实时性差的问题,提出了一种基于遥感任务调度规划结果的路由任务规划算法。该算法借鉴通信星座中基于快照序列的拓扑划分思想,提出星地最优建链策略和将地面站节点与卫星网络统筹规划的策略,能够基于遥感任务调度规划结果进行数传任务的路由规划。下一步工作将对遥感星座的路由协议部分进行深入研究。
