基于钢丝绳传动的自动抹灰机的轻量化设计
2022-05-06廖红玉邓梦洋谢良喜姚俊夫
廖红玉,邓梦洋,周 敏,谢良喜,姚俊夫
(1.中国一冶集团有限公司,湖北 武汉 430080;2.武汉科技大学冶金装备及其控制教育部重点实验室,湖北 武汉 430081;3.武汉科技大学机械传动与制造工程湖北省重点实验室,湖北 武汉 430081)
随着建筑产品的商品化,加快施工进度、缩短工程周期、提高投资效益是建筑工程建设的目标之一。在建筑施工周期中,对内外墙粉刷抹灰的耗时占30%~40%。目前墙面粉刷抹灰以人工施工为主,工人的工作环境差、工作繁重且效率低下。因此,迫切需要实用、高效、性能可靠、价格低廉的墙面抹灰机[1]。
刘延俊等[2]采用电气控制与气压传动相结合的方式设计了一种半自动抹灰机,其结构简单,操作方便。杨振宇等[3]设计了一种新型抹灰机,把灰浆喷涂改为直接抹灰,节约了作业成本,提高了工作效率。陈万强等[4]设计了一种基于产品功能的房体表层抹灰机,采用液压传动,使该装置能够很好地应用于室内外建筑工程,尤其适用于大面积房体表层抹灰的机械化作业。王莹等[5]利用传感器技术实现了对抹灰机抹灰部件的实时控制与调整,使抹灰机可以进行墙面无死角作业。冯爱华等[6]设计了一种室内墙壁用差动抹灰机,利用差动轮系原理,实现了螺旋式输送供料和离心式甩灰,大大提高了工作效率。孟宪举等[7]根据抹灰装置的工作状况,设计了一种集供灰、抹平和压实为一体的抹灰装置,并仿真分析了其抹灰的稳定性。阮学云等[8]设计了一种气动内墙智能抹灰机,通过行程开关阀将机械系统与气动系统相结合,实现智能抹灰,并解决了抹灰机频繁定位和定位不准确的问题。
目前的上一代抹灰机基本可以满足抹灰的市场需求,但仍然存在很多问题,如:对施工环境的要求较高;抹灰自动化程度较低,抹灰机操作较为复杂;抹灰机需要手工搬运;参与施工的人员较多,人力成本降低不多;抹灰机整机质量较大,有的重达389.8 kg,还会出现“头重脚轻”的问题[9]。因此,为了实现建筑抹灰机械的智能化,提高墙面抹灰质量,笔者设计了一种基于钢丝绳传动的自动抹灰机,并基于轻量化设计的理念[10],进行了其轻量化设计。
1 自动抹灰机的结构和工作流程
1.1 自动抹灰机的结构
通过一根封闭的钢丝绳实现抹灰机横向和纵向的运动。自动抹灰机的结构如图1所示。它主要包括横纵移模块、小车模块和喷涂模块。
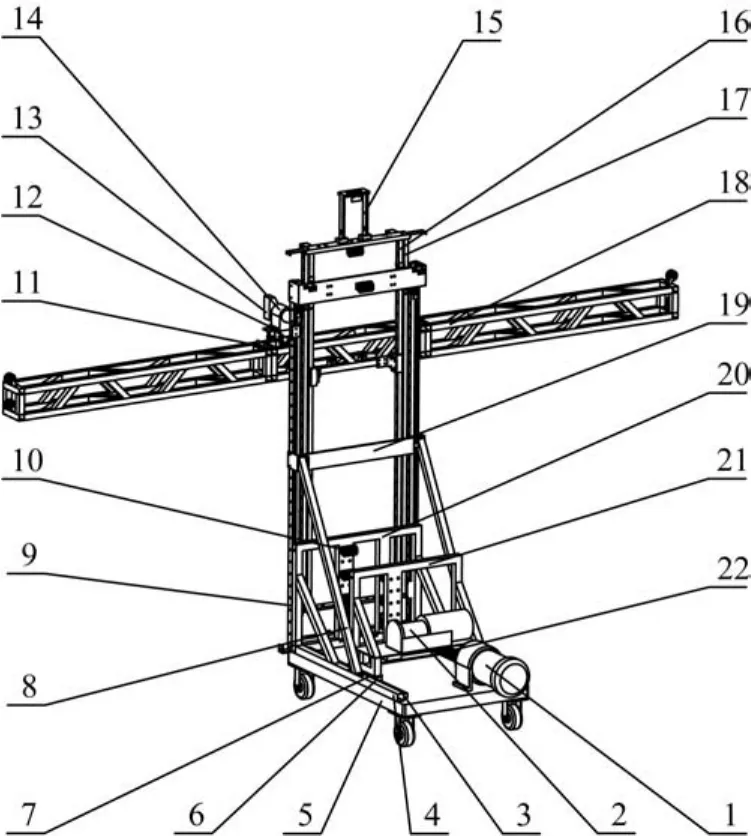
图1 自动抹灰机的结构Fig.1 Structure of automatic plastering machine
横纵移模块分为横移模块、纵移模块及其传动模块。横移模块包括合页锁扣、平移小车、喷嘴、喷嘴底座和桁架;纵移模块包括传感器安装支架、纵移导轨和连接板;传动模块包括钢丝绳和定滑轮。横移模块和纵移模块由钢丝绳传动并用螺钉固定,其定位和导向均采用直线导轨,以实现抹灰机整体的横移和纵移运动;将纵移模块置于小车上并进行焊接连接,实现纵移模块的整体竖直固定。喷涂模块由砂浆喷射装置和配套喷浆机组成,用于完成喷涂作业。砂浆喷射装置通过平移小车置于横移模块上,并通过卷扬机实现左右运动,同时喷涂模块的管接头通过软管与喷浆机连接,砂浆进入管接头并从砂浆喷射装置喷出,实现墙面抹灰。
为避免抹灰机“头重脚轻”,其驱动装置置于小车模块上。通过卷扬机的正反转控制喷嘴的左右移动;电机驱动丝杆旋转,使得卷扬机前后运动,实现纵移模块的升降,从而实现喷嘴的升降。抹灰机采用一根封闭的钢丝绳进行传动,实现喷嘴的横移和纵移运动,并利用直线导轨进行定位和导向,以实现喷嘴运动的平稳性。同时,通过钢丝绳传动可以使抹灰机轻量化,实现整机减重。
1.2 自动抹灰机的工作流程
自动抹灰机的工作流程如图2所示。将折叠好的抹灰机搬运至工作墙面,展开桁架,找平后锁紧小车轮,使小车固定,并检查装置的安全性;将喷浆机软管与喷嘴接头连接,启动电源使喷涂模块和卷扬机开始工作;卷扬机拉动喷嘴在桁架上横移运动,直到喷嘴运动到桁架的端部,则这一横行喷涂完成,此时卷扬机停止工作;纵移电机启动并拉动卷扬机往后运动,由于是在一根封闭的钢丝绳上,纵移导轨同时往上运动一个单位,然后电机停止,卷扬机拉动喷嘴开始喷涂下一横行;当纵移部分顶端的行程开关与屋顶接触时,这一工位的墙面喷涂完成,电机带动横纵移模块缓慢下降至开始位置直到触碰最低位置行程开关,抹灰机停止工作;移动抹灰机至下一个工位继续工作,直至完成所有墙面的抹灰工作。
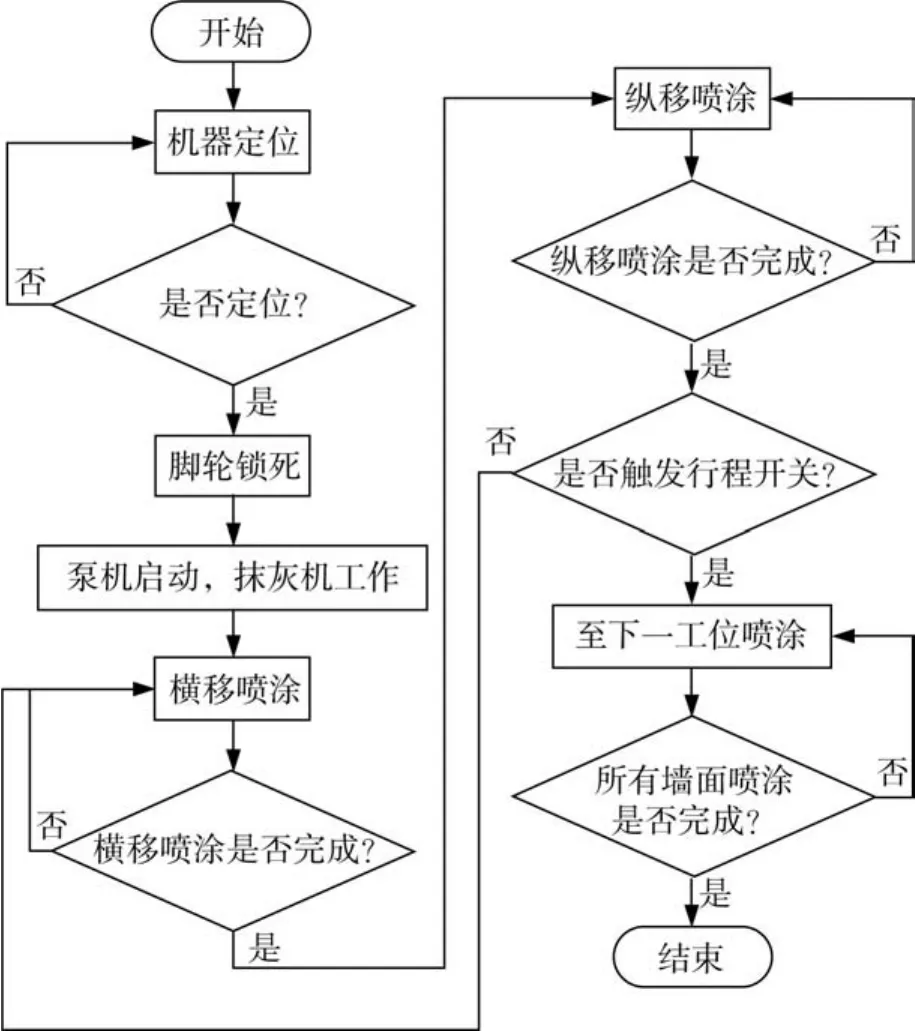
图2 自动抹灰机的工作流程Fig.2 Workflow of automatic plastering machine
2 自动抹灰机横纵移模块的传动设计
抹灰机工作时,喷嘴先在水平方向运动4 m,水平运动完成后纵移模块上升0.2 m,喷嘴继续作水平往回运动,以此完成整面墙的抹灰工作。喷嘴的横向运动与纵向运动互不干扰,分别由横移模块和纵移模块控制,而实现横移模块和纵移模块的传动构件为钢丝绳,其承载负载大,因此须对钢丝绳受力进行分析。
2.1 横移模块传动设计
喷嘴横移运动的原理如图3所示。喷嘴底座与喷嘴焊接在一起。钢丝绳的两端与喷嘴底座的外表面焊接。连接喷嘴底座的钢丝绳通过定滑轮换向,换向后钢丝绳还会通过纵移模块再次换向,最后钢丝绳缠绕在卷筒上。当卷筒旋转时,钢丝绳会随之转动并带动喷嘴移动,即:当卷筒正转时,喷嘴水平向左移动;当卷筒反转时,喷嘴水平向右移动。丝杆一端与卷筒相连接,另一端与小车机架相连接。
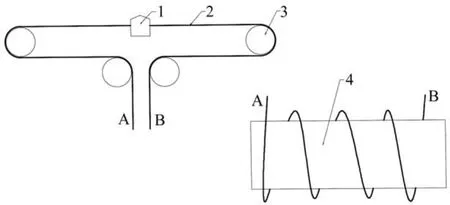
图3 喷嘴横移运动原理示意Fig.3 Schematic of principle of nozzle traverse movement
喷嘴在桁架上横向运动进行墙面水平方向的喷涂,因此对喷嘴水平运动的平稳性、精确性要求很高,在设计中用直线导轨连接喷嘴与桁架。直线导轨既可以将喷嘴与桁架连接起来,又可以起到导向作用。滑块与导轨动滑面之间的摩擦为滚动摩擦,摩擦阻力很小,因此驱动喷嘴水平运动所需的驱动力也较减小,则电机的驱动功率可以大幅度减小,从而使机械结构的稳定性得到提高,因此喷嘴水平运动的平稳性、精确性得到提高。
2.2 纵移模块传动设计
喷嘴纵移运动的原理如图4所示。横移模块和纵移模块用一根钢丝绳连接,为避免封闭的钢丝绳打结缠绕,在每一处钢丝绳导向位置装有双排滑轮组。钢丝绳经过滑轮组换向后最后连接到卷筒上,卷筒安装在动力模块上,动力模块与丝杆螺母连接。在丝杆传动下,动力模块与卷筒一起向后移动,进而拉动钢丝绳向后移动,从而带动横移模块沿着纵移框架向上移动。在上升过程中,当横移模块上升到设定距离时丝杆螺母停止运动,同时卷筒通过正反转拉动喷嘴在水平方向左右移动,依此进行整面墙的喷涂。

图4 喷嘴纵移运动原理示意Fig.4 Schematic of principle of nozzle longitudinal movement
卷筒所在的小车模块上装有3组滑轮,其与机架上安装的4组滑轮组成3组动定滑轮组。采用动定滑轮组既可以缩短6倍的工作距离,又可以改变力的作用方向,使得抹灰机尺寸小、结构简单且易于实现工作要求。在实际建筑物中,大部分门框的宽度不超过1.5 m,所以减小抹灰机的尺寸大小尤为重要。
2.3 钢丝绳受力分析与计算
钢丝绳具有柔性好、可靠性高、耐腐蚀强、自身质量小、能承受多种载荷等优点。为设计出安全性高的抹灰机,须对钢丝绳的受力进行分析与计算,并进行正确选型[11]。
经过评估,钢丝绳的承载负载为400 kg,故初步选取6*7+IWS钢丝绳[12]。其选择系数如表1所示。其中:K1——钢丝绳最小破断拉力系数;K2——充分涂油的某一结构钢丝绳单位长度的质量系数,kg·(100 m·mm2)-1;K3——指定结构钢丝绳的最小破断拉力系数。

表1 6*7+IWS钢丝绳的选择系数Table 1 Selection coefficient of 6*7+IWS wire rope
在抹灰机的工作过程中,钢丝绳受到多种复杂的应力作用。在工程实践中广泛采用选择系数法来确定钢丝绳的直径d:

式中:c——选择系数,;
T——单根钢丝绳最大的静拉力,N。

式中:m1——抹灰机钢丝绳的安全系数。
R0——钢丝绳公称抗拉强度,R0=157 0 MPa。
抹灰机工作级别为M4,则m1=4.5。将m1、K1、R0的值代入式(2),可得c=0.09。
采用滑轮组来实现抹灰机的横移、纵移运动。由于抹灰机工作范围不大,钢丝绳本身的质量可以忽略不计,则:

式中:Q——额定起重量,Q=400 kg;
Q0——吊具质量(装置中无吊钩),Q0=0 kg;
n——卷筒上钢丝绳分支数,本装置为双联滑轮组,n=2;
i——滑轮组倍率,本装置中有3组动滑轮,i=3;
η1——滑轮组效率,选用滚动轴承,η1=0.96;
η2——单联滑轮组的导向滑轮效率,η2=0.98;
g——重力加速度,g=9.8m/s2。
将以上各值代入式(3),可得T=694.44 N。
将c、T值代入式(1),可得d=2.37 mm。
钢丝绳单位长度质量M为:

式中:D——所选钢丝绳的公称直径,D=3 mm。
通过计算,可得M=3.48 kg/100 m。
钢丝绳最小破断拉力F0为:

通过计算,可得F0=5 072.67 N。
参考起重机钢丝绳的校核,所选取的钢丝绳必须满足:

式中:m——设计规范或安全规程规定的安全系数,m=4.5。
3 自动抹灰机的应用价值
采用自动抹灰机施工不仅可以提高抹灰的自动化水平、改善施工环境、提高施工质量和优化施工工艺,而且可以取得较高的经济效益。相比于人工粉刷抹灰,采用自动抹灰机可以使建筑企业显著降低生产成本。人工施工与采用自动抹灰机施工每天的施工面积和成本比较如表2所示。
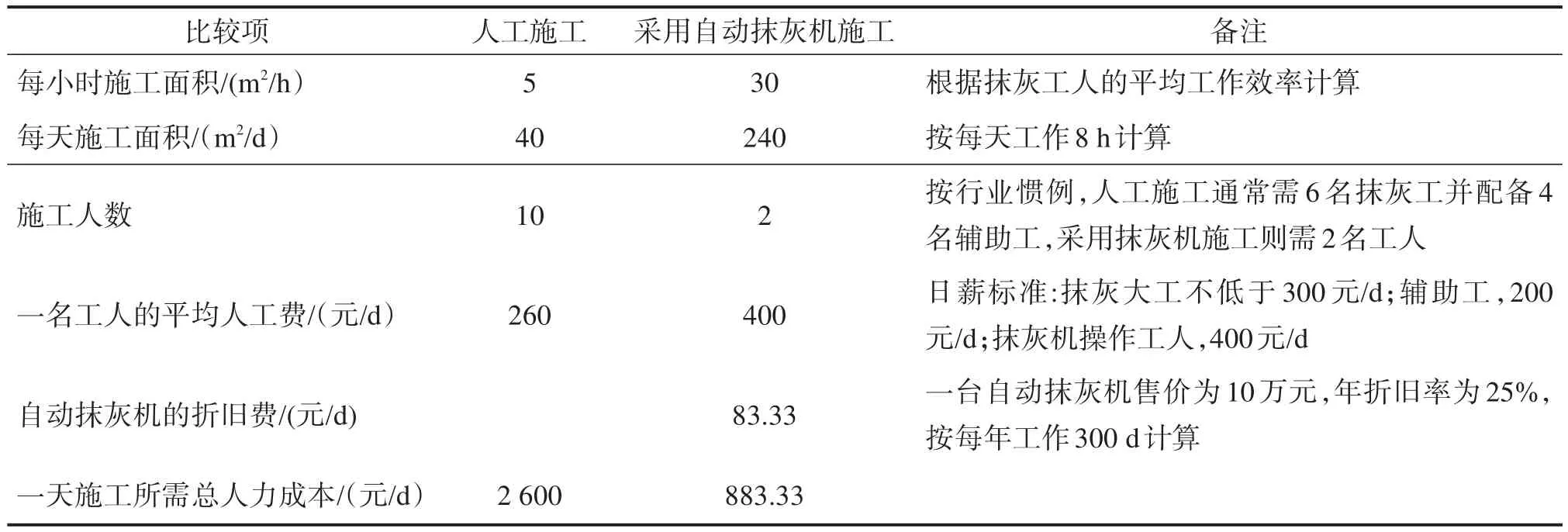
表2 人工施工与采用自动抹灰机施工每天的施工面积和成本比较Table 2 Comparison of construction area and cost per day between manual construction and automatic plastering machine construction
由表2可知,相比人工施工,采用自动抹灰机施工每天可减少1716.67元人力成本,而且施工面积是人工施工的6倍。按每年工作300 d计算,每年可减少51.50万元人力成本。因此,采用自动抹灰机施工可以使建筑企业减少成本支出,提高经济效益。根据武汉市城乡建设局统计,近年来武汉市每年的建筑工地超过1万个。自动抹灰机的使用年限为4 a,则平均每年约需2 000台,可见自动抹灰机具有良好的市场前景。
4 结 论
1)设计了一种基于钢丝绳传动的自动抹灰机,实现了抹灰自动化,推动了建筑机械行业向自动化、智能化发展方向。
2)采用钢丝绳作为传动构件,解决了抹灰机“头重脚轻”的问题,实现了抹灰机减重。
3)对钢丝绳受力进行分析与计算,表明所选择的钢丝绳符合工况要求。
4)对自动抹灰机的施工成本进行分析。结果表明,建筑企业采用自动抹灰机施工可以节约生产成本,显著提高经济效益。自动抹灰机具有良好的市场前景。
