轮-履-腿复合仿生机器人步态规划及越障性能分析
2022-05-06芮宏斌李路路王天赐段凯文吴莹辉
芮宏斌,李路路,曹 伟,王天赐,段凯文,吴莹辉
(西安理工大学机械与精密仪器工程学院,陕西 西安 710048)
波士顿动力公司研制的BigDog系列机器人促使仿生四足移动机器人成为全球范围内的研究热点,我国在国家高技术研究发展计划中将其列为自动化领域的主要研究对象之一[1]。与轮式和履带式机器人相比,四足机器人对复杂地形具有更好的适应能力,且在非结构化环境下的稳定性更高及移动能力更强,具有广阔的应用前景[2-3]。
四足机器人可以利用特定的步态在地面上运动,其优点是稳定性高和越障能力强。意大利理工学院的Semini等人[4]设计了一种HyQ四足机器人,并采用虚拟模型控制提高了该机器人的动态运动性能,使其具备了在崎岖路面上行走的能力。Zhang等人[5]基于ZMP(zero moment point,零力矩点)稳定裕度的方法设计了四足机器人的行走步态,提高了该机器人在复杂路面上的行走能力。朱红生等人[6]通过研究猫自由落体的翻正原理和运动学模型,设计了一种可以实现自动翻正和落地缓冲的四足机器人。但是,四足机器人的控制难度大,即使在平坦地面上行走也需要十分复杂的控制算法[7],且其运动速度明显不如轮式和履带式机器人。为了弥补四足机器人的缺陷,国内外学者提出了多种具有复合式移动机构的机器人。Chen等人[8]设计了一种可以在轮式与腿式之间变形转换的移动机器人,其采用轮式时可以在平坦地面上连续转动,采用腿式时可以借助二自由度刚性腿跨越不平坦的地面。桑董辉等人[9]根据提出的二自由度球面并联腿结构设计了一种轮-腿复合移动机器人,在保证机器人支腿工作空间的前提下缩小了支腿尺寸,增强了机器人的灵活越障性能。郑明军等人[10]提出了一种轮-腿复合的全地形移动机器人,并对其车身结构进行了优化,提高了其越障性能。综上,在实际工程应用中,具有复合式移动机构的机器人能够较好地适应复杂多变的作业环境。
基于此,笔者以仿生学思想为基础,通过分析海龟的身体结构和爬行动作,设计了一种轮-履-腿复合仿生机器人,并为其规划了多种仿海龟爬行步态。同时,为了更好地控制该机器人的越障运动,以跨越壕沟宽度和攀越台阶高度[11]为指标,通过建立越障理论模型来对机器人的越障性能进行分析和评价。最后,通过样机实验对该机器人的仿海龟爬行步态进行验证,并对机器人能够跨越的最大壕沟宽度和能够攀越的最大台阶高度进行测试,以验证所构建越障理论模型的正确性。
1 轮-履-腿复合仿生机器人的结构
机器人的越障能力在一定程度上与其自身的抗倾稳定性有关。当机器人以静步态爬行时,只要其重心落在足端的支撑域内,就不会发生翻倾。海龟作为一种两栖爬行动物,需要经常翻越岸边的礁石沟壑,但很少在运动中翻倾。如图1(a)所示,海龟的身体结构简单,主要由身体和四肢组成。海龟具有高抗倾稳定性的原因是其四肢向外展开,如图1(b)所示,其足端在地面上的支点Pi(i=1,2,…,4)形成了很大的支撑域,使得其身体重心在支撑域平面上的投影点G*到支撑域边缘的最短距离dmin始终远大于0,故海龟很少会在陆地上翻倾。
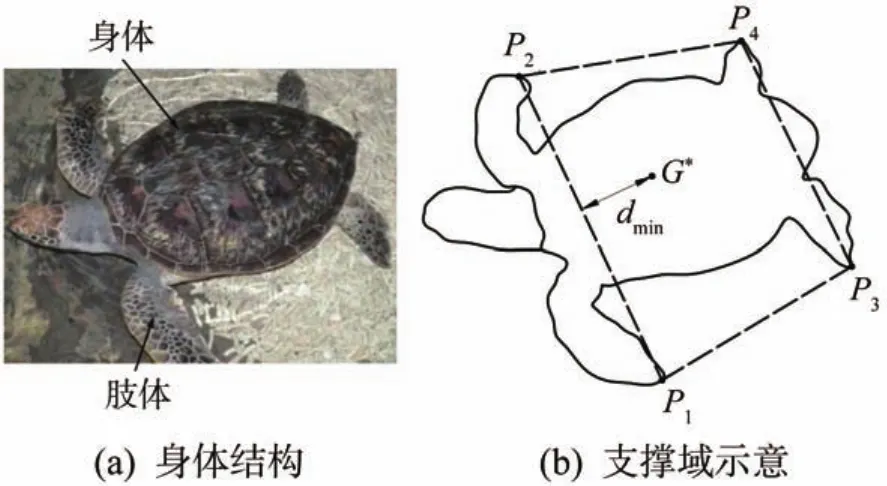
图1 海龟的身体结构和支撑域示意Fig.1 Body structure and supporting domain diagram of turtle
借助仿生学方法,提出了如图2所示的轮-履-腿复合仿生机器人机械结构。从整体上看,该机器人主要由机体和4条支腿组成。如图3所示,该机器人的每条支腿均由大腿、小腿和沼泽轮组成,其中沼泽轮由2个子午线轮胎构成,其可分别自由转动。每条支腿均具有2个自由度:在转腿电机驱动下,大腿绕转腿关节水平转动,在4条支腿的配合下可实现机体的向前、向后、向左和向右移动;在支腿电机驱动下,小腿绕支腿关节垂直转动,在4条支腿的配合下可实现机体的抬起与落下。此外,该机器人还配备了履带和回转支承。其中:履带用于增强机器人在平地上的移动能力;回转支承为机械臂等执行部件提供了安装位置。该机器人的主要结构参数如表1所示。
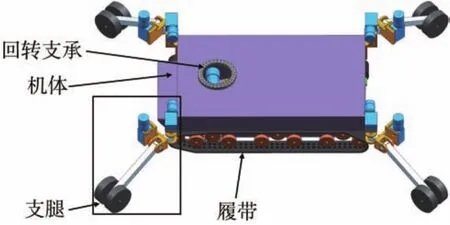
图2 轮-履-腿复合仿生机器人整体机械结构Fig.2 Overall mechanical structure of wheel-track-leg composite bionic robot
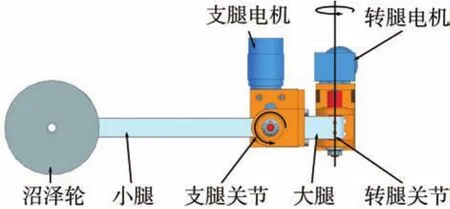
图3 轮-履-腿复合仿生机器人支腿结构Fig.3 Leg structure of wheel-track-leg composite bionic robot
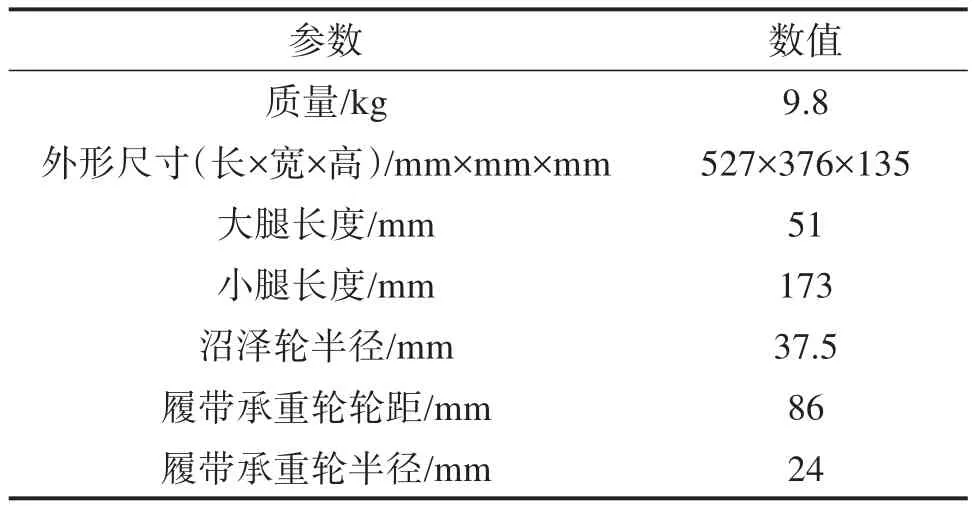
表1 轮-履-腿复合仿生机器人的主要结构参数Table 1 Main structural parameters of wheel-track-leg composite bionic robot
2 轮-履-腿复合仿生机器人步态规划
2.1 机器人运动学模型构建
建立机器人的运动学模型是为了求解其关节变量与支腿足端位置之间的映射关系。机器人机体的位姿由其支腿的动作决定,在某一给定瞬间,若已知支腿足端相对于机体的位置、速度和加速度,则可确定机体在地面上的运动状态[12]。
基于D-H法建立轮-履-腿复合仿生机器人的运动学模型[13]。以机器人的右前侧支腿为例,构建D-H坐标系,如图4所示。其中:坐标系{O}为整个机器人的基坐标系,其原点位于机体重心处,Y向为前进方向,Z向为机体重力方向的反方向。将该机器人的4条支腿分别标为1,2,3和4(右前侧支腿为支腿1),转腿关节和支腿关节分别标为1和2。坐标系{O10}为支腿1的初始坐标系,其原点位于该支腿关节1的中心,各坐标轴方向与基坐标系{O}一致,原点O10在基坐标系{O}中的坐标为(u,v,-w)。坐标系{O11}的原点位于关节2的中心,X11轴与大腿轴向重合,Z11轴与该支腿关节2的中心轴重合。坐标系{O12}的原点位于沼泽轮的转动中心,与支腿1的足端B1重合,X12轴与小腿轴向重合,Z12轴与沼泽轮的中心轴重合。支腿1的D-H参数如表2所示,其中:l1和l2分别为支腿的大、小腿长度;ε1j为支腿1上第j-1(j=1,2)个与第j个坐标系的Z轴之间的夹角,即关节j的扭歪角;d1j为支腿1上第j-1个与第j个坐标系的X轴之间的距离,即关节j的横距;θ1j为支腿1上第j-1个与第j个坐标系的X轴之间的夹角,即关节j的转角。
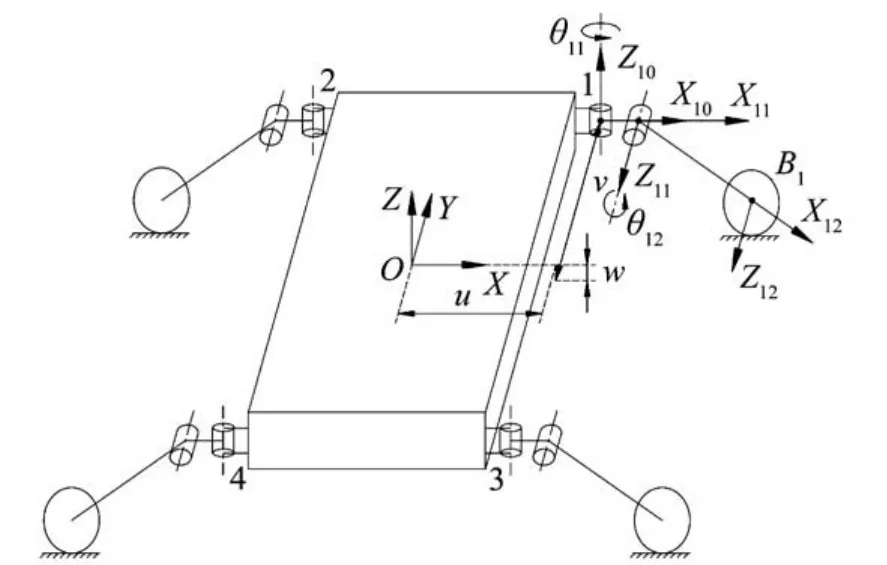
图4 轮-履-腿复合仿生机器人支腿1的D-H坐标系Fig.4 D-H coordinate system of leg 1 of wheel-track-leg composite bionic robot
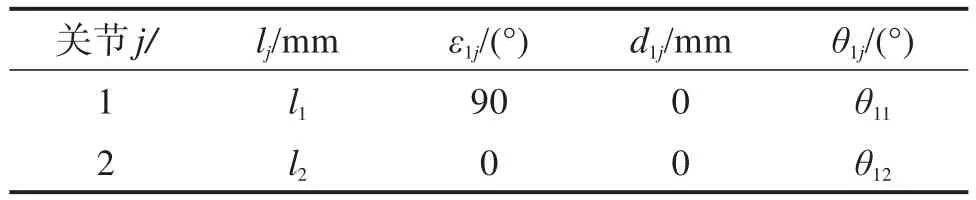
表2 轮-履-腿复合仿生机器人支腿1的D-H参数Table 2 D-H parameters of leg 1 of wheel-track-leg composite bionic robot
则相邻2个坐标系的变换矩阵A1j为[14-15]:
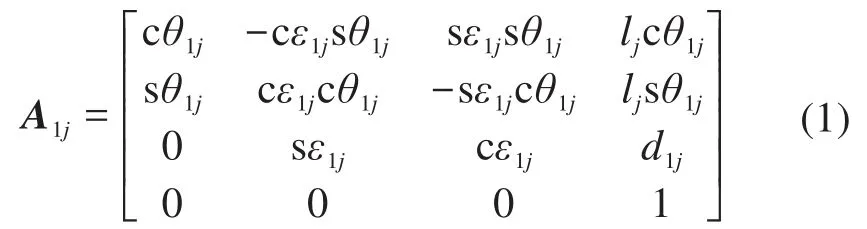
式中:c表示cos,s表示sin。
则机器人的基坐标系{O}到支腿1足端坐标系{O12}的变换矩阵A1为:
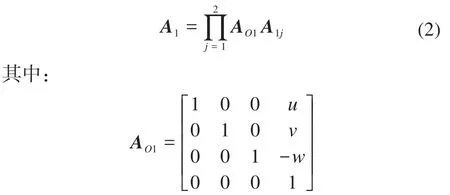
式中:AO1为基坐标系{O}到坐标系{O10}的变换矩阵。
设支腿1的足端B1在基坐标系{O}中的坐标为(B1x,B1y,B1z),联立上述方程可得:
式(3)为轮-履-腿复合仿生机器人支腿1足端的正运动学方程。按相同方法,构建其他支腿的D-H坐标系,即可求得各支腿足端的正运动学方程,从而获得机器人的运动学模型。
2.2 机器人步态规划
基于推导得到的轮-履-腿复合仿生机器人的运动学模型,通过观察海龟的爬行动作,对机器人的步态进行规划[16]。图5所示为海龟在单个爬行步态周期内的动作,通过分析可知:海龟在爬行时,其四肢通常同步动作,可分解为4个动作,即放腿、爬行、抬腿和摆腿。初始姿态下,海龟依靠身体支撑地面,四肢足端悬空;开始爬行时,海龟的四肢同时下压以撑起身体,然后利用前肢或四肢同时拨动地面以进行爬行;爬行完成后,四肢慢慢抬起,身体落下以支撑地面,而后四肢继续摆动至足端悬空;最后,四肢摆动至初始姿态,以进入下一次爬行。
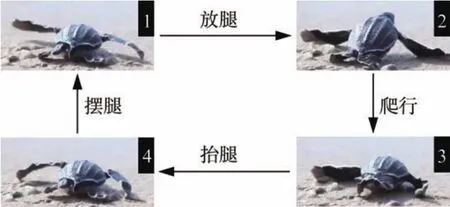
图5 海龟爬行过程示意Fig.5 Schematic diagram of turtle’s crawling process
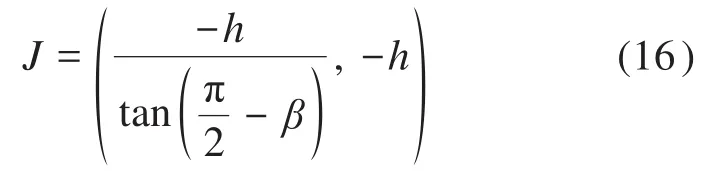
根据海龟的爬行步态,本文为轮-履-腿复合仿生机器人规划了两腿爬行步态和四腿爬行步态,分别如图6(a)和图6(b)所示;同时通过改进,规划了旋转步态和横向步态,分别如图6(c)和图6(d)所示。这些步态可分别实现机器人的横向移动、纵向移动以及原地旋转,能够有效提升机器人的运动能力。
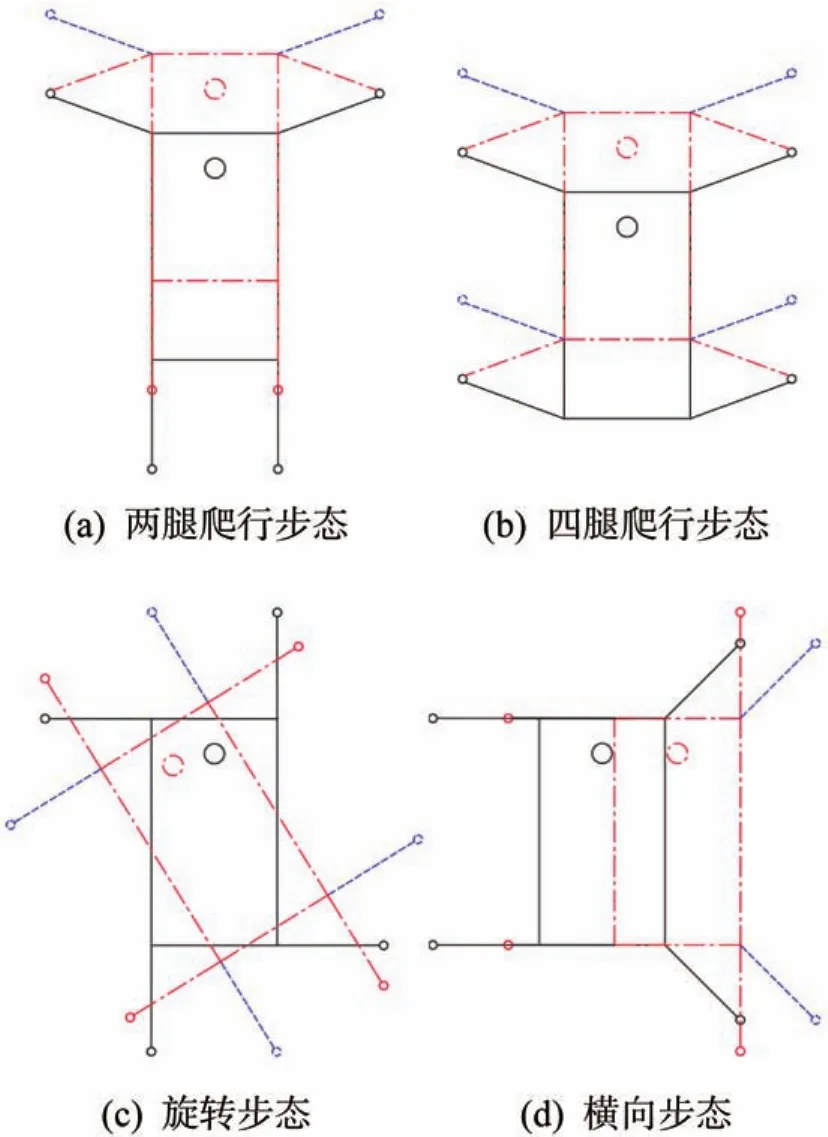
图6 轮-履-腿复合仿生机器人的4种仿海龟爬行步态Fig.6 Four imitation turtle crawling gaits of wheeltrack-leg composite bionic robot
现以图6(b)所示的四腿爬行步态为例,简单介绍轮-履-腿复合仿生机器人的爬行过程。当机器人以四腿爬行步态爬行时,要求其支腿保持左右对称,且同一侧的前、后支腿始终保持平行,以及4条支腿同时垂直转动。机器人的初始状态为:机体支撑地面,4个沼泽轮悬空,并保持图中实线所示姿态。在支腿电机的驱动下,4条支腿同时向下转动,开始放腿动作,沼泽轮与地面接触后作纯滚动运动;待支腿将机体撑起后,在转腿电机的驱动下,4条支腿同时向机体尾部转动,在该过程中沼泽轮与地面产生静摩擦,在支腿的拨动下,机器人向前爬行;完成爬行后(机器人呈图中点划线所示姿态),4条支腿同时向上转动,机体落下并支撑地面,沼泽轮悬空;最后,4条支腿同时向机体头部转动至下一次爬行的初始姿态(图中虚线所示)。重复这4个动作(放腿、爬行、抬腿和摆腿),机器人即可实现连续向前爬行。图6所示的4种步态的动作过程一致,区别在于:两腿爬行步态和横向步态只需前侧或右侧的2条支腿动作,对侧的2条支腿起支撑作用;而四腿爬行步态和旋转步态需要全部支腿支撑并且动作。
2.3 机器人关节力矩计算
电机是机器人的核心单元,用于驱动机器人支腿做各种动作。电机的驱动扭矩是机器人动力设计的关键。考虑到本文所设计的轮-履-腿复合仿生机器人的运动速度不高,在设计过程中忽略动态惯量的作用,即视其支腿关节匀速转动。在自身重力的作用下,该机器人爬行时主要受到的外力为地面支撑力,且支腿关节所受力矩与沼泽轮位置有关。现以四腿爬行步态为例,对所设计机器人支腿的关节力矩进行分析和计算。
图7所示为机器人以四腿爬行步态爬行时的受力分析。图中:Bi为支腿i的足端;fi和Ni分别为足端Bi所受的地面静摩擦力和支反力;Ti1和Ti2分别为支腿i关节1和2所受的力矩。
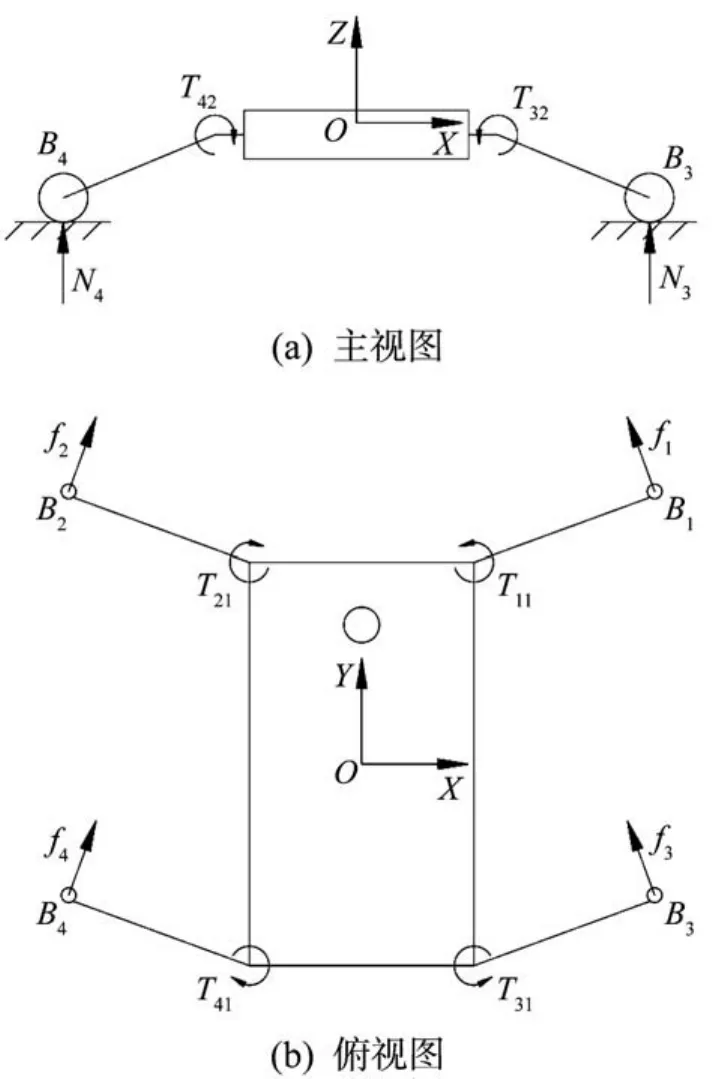
图7 四腿爬行步态下轮-履-腿复合仿生机器人的受力分析Fig.7 Force analysis of wheel-track-leg composite bionic robot under four-legged crawling gait
由图7可知,当该机器人处于静平衡状态时,有:
式中:m为机器人质量;Bix、Biy分别为支腿足端Bi在基坐标系中的X、Y坐标。
鉴于四腿爬行步态要求轮-履-腿复合仿生机器人的左、右侧支腿对称,且4条支腿同时转动,则有:
式中:θi1、θi2分别为支腿i关节1和2的转角;θf1、θr1分别为前、后侧支腿关节1的转角;θf2、θr2分别为前、后侧支腿关节2的转角。
由此可得,该机器人支腿各关节所受的力矩为:
式中:μ为地面静摩擦系数。
3 轮-履-腿复合仿生机器人越障性能分析
轮-履-腿复合仿生机器人的越障性能主要取决于支腿、履带底盘的几何参数和路面的物理特性,其主要评价指标为跨越壕沟宽度和攀越台阶高度。现从空间几何角度出发,建立机器人跨越这2种障碍的理论模型(越障过程中机器人时刻保持左、右侧支腿对称),通过求解其能跨越的最大壕沟宽度和能攀越的最大台阶高度,对其越障性能进行分析和评价。
3.1 机器人跨越壕沟的理论模型
机器人在跨越壕沟时,最重要的是避免重心失稳,即机体的重心始终处于支撑域内。如图8所示,轮-履-腿复合仿生机器人向右跨越壕沟时,需要时刻保持前、后侧支腿与机体纵向平行,且沼泽轮与地面接触。通过求运动学方程逆解可得,在整个跨越过程中,机器人各支腿关节的转角为:θi1=90°,θi2=-23°。
如图8(a)所示,在阶段1,机器人开始进入壕沟,此时机器人不发生翻倾的条件为:机体重心与壕沟后端顶点Pr竖直平齐时,前沼泽轮已经越过壕沟前端顶点Pf,并与右侧地面接触。定义这个阶段满足条件的最大壕沟宽度为L1。
如图8(b)所示,在阶段2,机器人完全进入壕沟,此时机器人能够继续前进的条件为:履带的前承重轮与壕沟前端顶点Pf接触时,后承重轮仍处于壕沟后端顶点Pr的左侧,并与左侧地面接触。定义这个阶段满足条件的最大壕沟长度为L2。
如图8(c)所示,在阶段3,机器人离开壕沟,此时机器人不发生翻倾的条件为:机体重心与壕沟前端顶点Pf竖直平齐时,后沼泽轮仍处于壕沟后端顶点Pr的左侧,并与左侧地面接触。定义这个阶段满足条件的最大壕沟宽度为L3。
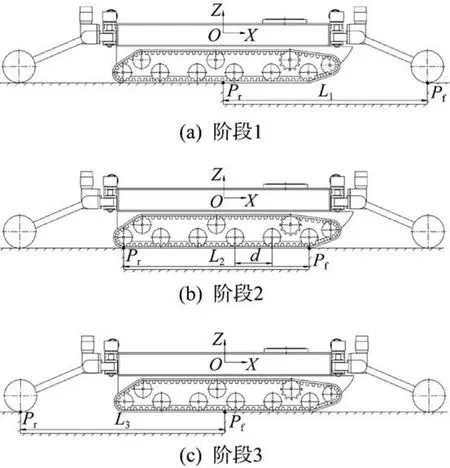
图8 轮-履-腿复合仿生机器人跨越壕沟示意Fig.8 Schematic diagram of wheel-track-leg composite bionic robot crossing trench
综上所述:
式中:Bfy、Bry分别为前、后侧支腿足端在基坐标系中的Y坐标;d为履带承重轮轮距。
由此可得,该机器人能够跨越的最大壕沟宽度Lw为:

3.2 机器人攀越台阶的理论模型
轮-履-腿复合仿生机器人能够借助支腿和履带攀越一定高度的台阶,其能够攀越台阶的临界状态为:机体重心在竖直方向上的投影能够落在台阶面内[17-20]。如图9所示,该机器人攀越台阶的过程主要分为3个阶段。
如图9(a)所示,在阶段1,机器人前侧支腿竖直向上抬起,在履带的驱动下靠近台阶,后侧支腿水平向前并紧贴机体。前侧支腿能够攀上台阶的条件为:其沼泽轮胎底高于台阶面。设该阶段满足条件的最大台阶高度为H1,则有:

式中:h为机器人机体重心到履带底面的垂直距离;Bfz为前侧支腿足端的Z坐标;R为沼泽轮半径。
如图9(b)所示,在阶段2,前侧支腿的沼泽轮登上台阶,并将机器人撑起,履带驱动机器人靠近台阶顶点。图中:Ar为履带后承重轮的中心,Bf为前侧支腿沼泽轮的中心。设线段ArO、ArBf与地面水平线的夹角分别为α、α3,设线段ArO、ArBf与基坐标系Y轴正向的夹角分别为α1、α2,则有:
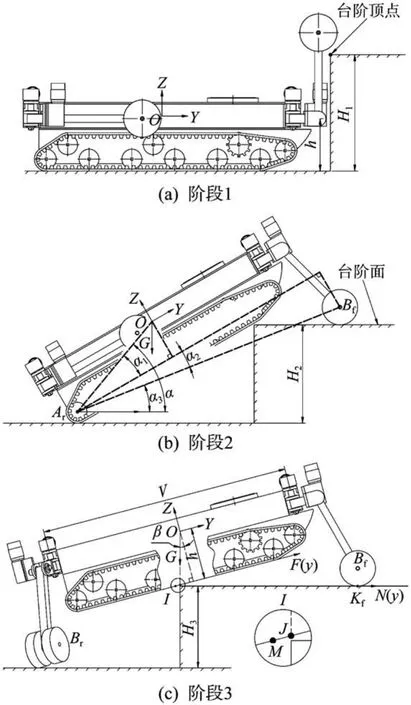
图9 轮-履-腿复合仿生机器人攀越台阶示意Fig.9 Schematic diagram of wheel-track-leg composite bionic robot climbing step
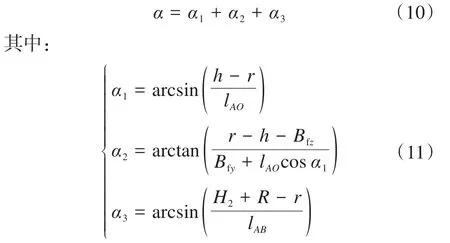
式中:r为履带承重轮半径;lAO、lAB分别为线段ArO、ArBf的长度;H2为阶段2满足条件的最大台阶高度。
由式(11)可知,α1只与机器人结构有关,α2为机器人因仅前侧支腿支撑而产生的仰角,α3为阶段2中机器人因支撑台阶而产生的仰角。在阶段2中,机器人不发生翻倾的条件为:α<90°。
如图9(c)所示,在阶段3,支腿电机驱动机器人后侧支腿向下转动,当将机器人机体尾部撑起后,转腿电机驱动后侧支腿拨动地面以进行两腿爬行,此时机器人开始攀登台阶。设机体重心竖直投影到履带底面上的点为J,台阶顶点水平投影到履带底面上的点为M,则机器人能够成功攀上台阶的条件为:机体重心与台阶顶点竖直平齐时,履带底面还未与台阶顶点接触,即在基坐标系中,点J的Y向坐标Jy大于点M的Y向坐标My。设该阶段满足条件的最大台阶高度为H3,鉴于该阶段为后侧支腿的沼泽轮支撑地面,则有:
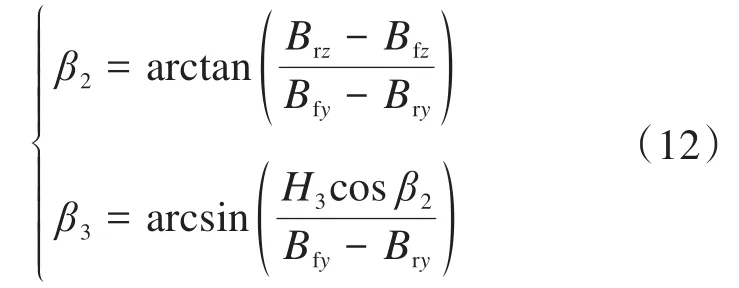
式中:β2为机器人因前、后侧支腿姿态不同而产生的仰角;β3为阶段3中机器人因支撑台阶而产生的仰角;Brz为后侧支腿足端在基坐标系中的Z坐标。
由此可得,机器人在阶段3的仰角为:

基于机器人的基坐标系,设其重力方向直线和履带底面的函数表达式G(y)和F(y)分别为:
联立式(14)和式(15),则可得交点J的坐标:
同时,基于机器人的基坐标系,设台阶面的函数表达式N(y)为:

由于机器人前侧支腿沼泽轮在台阶面上的支点Kf的Y、Z坐标分别为Bfy、Bfz-R,将其代入式(17)后可得:

联立式(15)、式(17)和式(18),可得交点M的坐标:

则由My=Jy解得:

式中:ω(θf2,θr2)为关于机器人前、后侧支腿关节2转角的函数。
综上所述,机器人能够攀越的最大台阶高度H为:

4 实验研究
为进一步验证所设计轮-履-腿复合仿生机器人的仿海龟爬行步态的合理性以及所构建越障理论模型的正确性,制作了机器人实验样机。为了减小机器人的质量,其机体和支腿均采用铝合金加工而成;安装电机的支架通过3D打印制成;电机为直流有刷电机,为满足爬行时电机随时能自锁的要求,电机采用蜗轮蜗杆减速传动的方式连接。利用所制作的机器人样机,开展步态实验和越障实验。
图10所示为轮-履-腿复合仿生机器人步态实验现场,实验路面为普通花岗岩地面。结果表明,该机器人可实现不同步态下的移动或转向,且电机驱动平稳,机构无干涉。从图10中可以看出,两腿爬行步态和四腿爬行步态可实现机器人向前移动,旋转步态可实现机器人原地转向,横向步态可实现机器人横向移动。步态实验结果验证了仿海龟机械结构设计的可行性和仿海龟爬行步态的合理性。
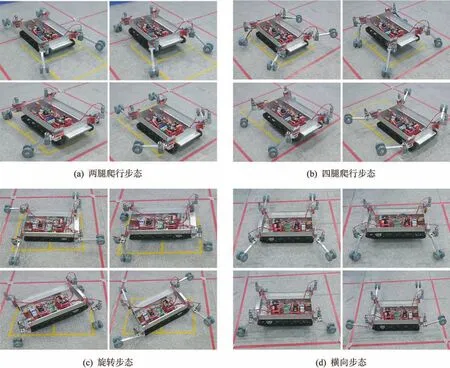
图10 轮-履-腿复合仿生机器人步态实验现场Fig.10 Gait experiment site of wheel-track-leg composite bionic robot
图11所示为轮-履-腿复合仿生机器人跨越壕沟和攀越台阶的实验现场,实验路面为水泥路面。由图11可知,在实验过程中,该机器人的履带、支腿和沼泽轮可以协调配合、同步工作,能够成功跨越壕沟和攀越台阶。

图11 轮-履-腿复合仿生机器人越障实验现场Fig.11 Obstacle-surmounting experiment site of wheel-track-leg composite bionic robot
在跨越壕沟实验中,该机器人能够跨越最大宽度为434 mm的壕沟,略大于理论值430 mm,其相对误差为0.92%。由此说明,所构建的机器人跨越壕沟的理论模型正确。
在攀越台阶实验中,共进行了8组实验,即取8种不同的机器人姿态(前、后侧支腿关节2转角的取值不同),结果如表3所示。其中:H为最大攀越台阶高度的理论计算值,H*为实验测量值。机器人成功攀越台阶的标准为:机器人能够在台阶上稳定3 s以上。由表3数据可以看出,该机器人前、后侧支腿分别下压90°时,能够攀越的台阶最高。此外,所建立的机器人攀越台阶理论模型的计算结果与实验结果的相对误差保持在1.4%~6.2%。存在误差的主要原因是:在惯性作用的影响下,该机器人登上台阶时产生了一定程度的晃动,且支腿的动作导致其整体重心相对于机体重心在纵向和垂向上产生较小的变化。但是相对误差较小,由此说明所建立的机器人攀越台阶理论模型正确。
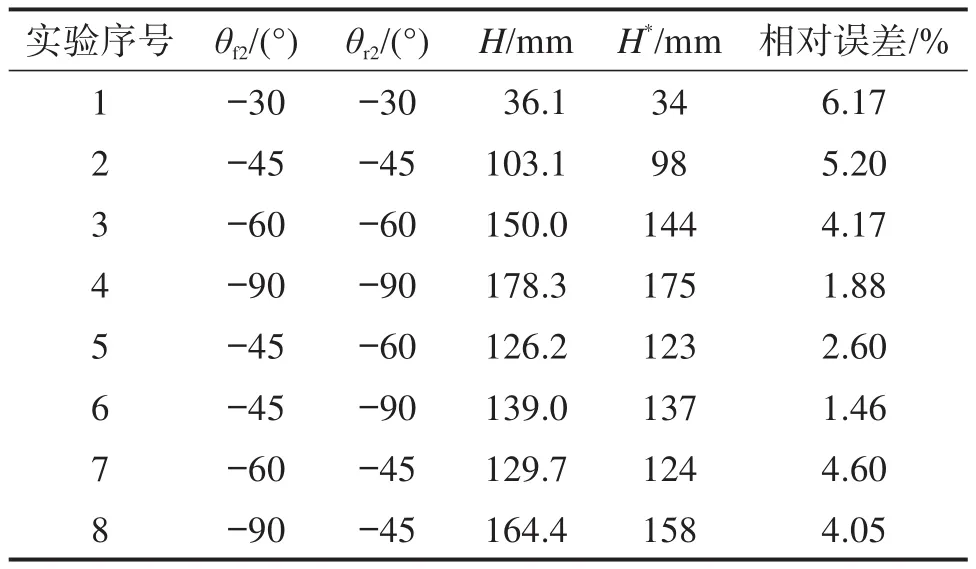
表3 轮-履-腿复合仿生机器人越障实验结果Table 3 Obstacle-surmounting experiment results of wheeltrack-leg composite bionic robot
5 结 论
1)以海龟为仿生原型,设计了一种轮-履-腿复合仿生机器人,其兼具轮胎、履带和支腿的结构特点,3种移动机构可以协调配合、同步工作;每条支腿有2个自由度,可模仿海龟爬行。
2)通过观察海龟的爬行动作,为轮-履-腿复合仿生机器人规划了4种仿海龟爬行步态,在这些步态下机器人可实现横向移动、纵向移动、原地旋转和跨越越障的功能。同时,建立了机器人跨越壕沟和攀越台阶的理论模型,并对其能够跨越的最大壕沟宽度和能够攀越的最大台阶高度进行了求解,实现了对其越障性能的评价。
3)通过样机实验验证了所设计轮-履-腿复合仿生机器人的仿海龟机械结构可行,所规划的仿海龟爬行步态合理,以及所建立的越障理论模型正确。
