基于霍夫变换和深度神经网络的停车场空位检测模型
2022-04-29全江浩王云成
全江浩 王云成

摘要:如今人均车辆保有率逐年上升,如何快捷寻找停车场空位成为停车行业研究的新方向。随着深度学习技术的发展,使用深度学习检测停车场空位,为解决停车位检测问题提供了新思路。文章提出了一种基于深度学习结合透视变换,Canny算子边缘检测和霍夫变换直线特征提取等方法的停车场空位检测模型,其准确率达到94.44%,在检测停车空位方面取得较好效果﹐为停车场空位图像检测方向提供了实现方法和技术支撑。
关键词:霍夫变换;边缘检测;深度学习;车位检测中图法分类号:TP391文献标识码:A
Parking space detection model based on hough transform anddeep neural network
QUAN Jianghao,WANG Yuncheng
(College of Data Science and Application,Inner Mongolia University of Technology,Huhhot o10051,China)Abstract: Nowadays,the per capita vehicle occupancy rate is increasing year by year.How to quicklyfind parking spaces has become a new direction of parking industry research. With the development ofdeep learning,deep learning is used to detect parking spaces,which provides innovative ideas forsolving parking space detection problems. In this paper,a parking space detection model based ondeep learning combined with perspective transform,Canny operator edge detection and Houghtransform linear feature extraction is proposed. The accuracy rate reaches 94.44 %,and good resultsare achieved in the detection of parking spaces,which provides implementation methods andtechnicalsupport for parking space image detection.
Key words: houghtransform,edgedetection,deeplearning,parking detection
1 引言
近年來,国内车辆人均保有率持续上升,提高停车位利用率成为新的研究方向。在充分利用现有车位的前提下,协助驾驶员更快地找到空车位,可以提高停车场的空位利用率。目前,大多数停车场基于安全考虑已实现视频监控全覆盖,在此基础上可以构建基于分析视频图像监测停车场的车位情况系统。传统图像检测是将图像灰度尖峰区域作为特征检测车位的方法[1] ,对车位的选定为人工输入,无法根据环境情况进行更新,易受环境信息的干扰。人工智能技术发展迅速,深度学习是当今研究和应用的热点技术。基于此,本文主要应用深度学习网络中的卷积神经网络(CNN)进行停车场空位检测,基于 Canny 算子边缘检测、霍夫变换直线检测、图像透视变换等技术,处理原始停车场图像数据,可有效提高检测的准确率。
2 原始数据预处理
2.1 停车位透视变换
该模型使用逆透视变换的方法,可将车位图像变换为俯视图。假设停车场摄像机安装的位置在世界坐标系中的坐标为(d,l,h),摄像机光轴 o 在 z =0 平面的投影与 y 轴的夹角为γ,光轴 o 与 z =0平面的夹角为θ,摄像机的视角为2α,摄像机在水平方向和垂直方向的分辨率分别为 Rx 和 Ry [2]。则根据坐标变换关系,可得从图像坐标系 I 变换到世界坐标系 W 的逆透视变换模型如下:
2.2 边缘检测
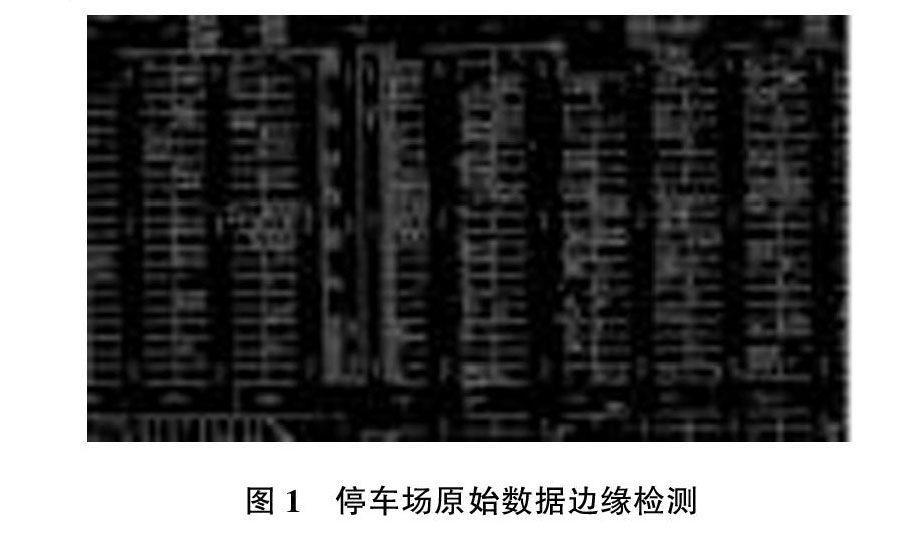
图像边缘检测是图像处理流程中较为重要的环节。目前,主流的边缘检测多样,结合车位检测任务对 log 算子、sobel算子、canny 算子等进行评估与选择:log 算子常产生双边界,sobel算子易形成不闭合区域,无法满足停车位检测的需要。而 canny 算子是相较更优的阶梯型边缘检测算法[3]。1986年,John Canny 首次提出了 Canny 算子,Canny 边缘检测算法运用高斯函数对原始图像进行卷积运算到达去噪效果,从而得到平滑图像[4]。公式如下:
式中 G( x ,y)代表平滑因子,?代表卷积操作,I( x ,y) 代表滤波后的图像,σ代表均方差。本文采用 canny 算子边缘检测技术实现停车场原始图像数据的边缘检测,图1 为停车场原始数据检测边沿效果。
2.3 直线特征提取
前文介绍的车位图像中,车位特征信息主要为直线边缘特征,通过对停车位直线特征的检测,可提取车位的有效位置信息。1962年,Paul Hough 根据数学对偶性原理提出了检测图像直线的方法,此后该方法被不断地研究和发展,集中应用于模式识别领域中对二值图像进行直线检测[5]。霍夫变换通过图像平面中的点计算得到参数平面中的线,通过参数平面中相应线的交会地址计算图像平面中的目标直线。直线上的两个点( x 1,y1) 和( x2,y2) 在参数平面分别对应一条曲线:
式中,θ代表直线通过原点的垂线段与 x 轴正方向夹角,ρ代表垂线段的长度。若将θ,ρ作为参数,则直线在参数平面可表示为一点(θ,ρ)。两曲线交点的坐标(θ′,ρ′)为该直线在xy平面内的对应参数[6] 。将θρ平面离散化为累加单元 A ,并将其初始化为0 ,然后令θ等于每一个允许的细分值,对图像中的每一个非背景点( x2,y2) 得到与之对应的ρ。本文应用
霍夫变换原理提取停车场车位的边缘直线特征。图2 为原始数据经过霍夫直线检测并处理得到目标车位预测。
3 自建数据集
停车场车位数据属于非公开数据,所用数据大多来自网络,包含空位、占位、杂物占位等多种车位情况,图像数据分辨率为300×600像素,共选取的图像数量为1355张,根据空位和占位的不同种类分别置于文件夹中,按照3 ∶1的比例,随机抽取图片分别划分成训练集和测试集,每个种类展示3 张图片。
4 模型分析
本文搭建的神经网络检测模型是一种针对停车场空位检测任务设计的轻量级卷积神经网络。在神经网络结构中,卷积层的数量不同会对神经网络性能产生较大影响。因此,进行对比实验时,探讨较适合停车场空位检测模型的卷积层数量,经过多轮实验得出结论:卷积层数量为3 的卷积神经网络在处理车位检测任务时性能表现较为出色。sigmoid 是最接近生物神经元的函数,在处理二分类问题时表现出色,该函数图像平滑,较易于求导,具体数学功能是将实数映射到[0 ,1] 区间[7] ,契合停车场空位检测二分类任务,所以自建停车场空位检测模型所用分类层由 sigmoid 函数实现。图3 为该自建模型的可视化展示。
5 训练模型
5.1 数据增强
停车空位作为一个场景分类任务,其标签涉及光线、噪点以及场景环境等多种要素,仅从有限的数据集中训练出能够较准确识别停车场车位情况的模型是非常困难的,因此还需要通过数据增强方法对数据集的数量和质量进行提升。本文采用动态的数据增强方法,在每轮训练开始之前,通过透视变换理论重新随机选择训练集中的车位图像,进行左右翻转或角度偏移以及在一定范围内随机设置图片亮度、对比度和饱和度,扩大数据集的规模,提高模型的鲁棒性。
5.2 自建模型训练
使用训练集的样本图像训练自建模型,模型训练只使用 GPU 运算,每一轮参与训练的样本总数为 1553。每轮训练采用分批次的方法,一个批次训练所用的样本数( Batch Size )设为32,因此每輪的迭代数(Epoch)等于50。初始学习率( Learning Rate )初始设置为0.001,应用动态学习率策略实时优化模型参数。图 4表示准确率(Accuracy)和损失值(Loss )随轮次的变化,随着轮次数值接近40次时,训练集损失值逐步收敛于0 ,准确率逐步趋于1 ,表明模型训练成功。
6 评估模型预测效果
使用验证集样本图像测试已经完成训练的自建深度学习模型,验证集数据独立于训练集外,总计 446张,经过模型预测,总体准确率为94.44%,总体准确率的具体定义模型预测正确的数量与测试数据总量的百分比。图5 为使用原始数据测试模型的结果样图,得出原始数据中车位总数和空位分布情况。
7 结论
本文主要研究基于视觉分析的停车场空位检测算法,结合 Canny 算子检测方法、透视变换原理和霍夫变换直线检测理论提取停车位特征数据并加以训练,基于卷积神经网络设计出停车场空位检测的二分类识别方法,利用自建数据集完成在多种停车情景中的停车位检测任务。模型训练开始时,首先根据原始数据固有特点对初始学习率、轮次、步长等参数进行合理设置,创新采用 Canny 算子检测方法和透视变换原理结合的预处理流程,极大扩增了样本训练量,并在接下来的测试集预测中,总体准确率达到94.44%,对多种停车情景的识别效果较好,表明使用该算法对停车场空位进行检测是切实可行的,同时也为实现停车场空位检测的智能化提供了理论技术和实用方法。
参考文献:
[1 ] 王建飞.停车场空位检测系统研究[ D].贵州:贵州民族大
[2 ] 李海华,万热华,陈小玲,等.一种基于逆透视变换的车道线检测方法[J].工业仪表与自动化装置,2021( 2):97?100.
[3 ] 梅永,庄建军.基于 Canny 边缘检测的图像预处理优化算法[J].信息化建设,2022,46(1 ):75?79.
[4 ] Canny J .A Computational Approach to Edge Detection [ J ].IEEE Transactions on Pattern Analysis and Machine Intelligence ,1986,PAMI?8( 6):679?698.
[5 ] 唐佳林,王镇波,张鑫鑫.基于霍夫变换的直线检测技术[ J ].科技信息,2011 (14):33?35.
[6 ] 李慧鹏,朱伟伟,谭朦曦,等.基于改进 Hough 变换的直线检测算法[J].半导体光电,2017,38(4 ):603?608.
[7 ] 王攀杰,郭绍忠,侯明,等.激活函数的对比测试与分析[J].信息工程大学学报,2021,22(5 ):551?557.
作者简介:
全江浩(2001— ),本科,研究方向:计算机视觉。
王云成(1993—) ,硕士,助教,研究方向:深度学习、智能系统。
