悬挂式测力天平频响函数研究
2022-04-28戴志坤高宏力李世超刘勃锴
戴志坤,高宏力,李世超,刘勃锴
(西南交通大学机械工程学院,四川 成都 610031)
1 引言
近50年来,我国航空航天事业的不断发展,对飞行器的研制提出了更高的要求。目前,风洞试验因其准确,高效等特点,仍是飞行器空气动力学研究的关键手段。风洞天平是风洞试验的核心设备,实质上是一种多分量的力传感器[1]。风洞天平与飞行器模型连接,当模型受到外部气动力作用时,气动力通过结合部传递到风洞天平上[2]。通过天平结构将气动力沿三个互相垂直的方向分解,测量出模型所受的气动力和力矩。风洞天平试验数据的可靠性直接关系到飞行器的气动特性优劣,所以天平的标定对飞行器研制有重要意义[3]。
目前,国内外对风洞天平的研究主要集中在天平的有限元分析与静态标定,少数研究了天平的动态标定。静态标定得到的静态标定函数用于稳态状况下对飞行器气动力的测量;动态标定得到的频响函数则表明风洞天平在频域下输入输出的动力学特征。文献[4]建立了盒式应变天平的理论模型,计算了测量元件刚度对质量块位移曲线的影响,但没有考虑单元多自由度的情况[4];文献[5]建立了脉冲风洞天平的动力学模型,并对其进行了虚拟标定和模态分析,但没有对天平进行试验验证。文献[6]采用熔线在标定点垂直方向悬挂一定质量的物体,熔断熔线施加阶跃力对天平进行动态标定,但熔线的熔断时间对结构而言会引入额外的非线性。
考虑前述研究中存在的问题,针对悬挂式测力天平研制了一种动态标定装置。通过砝码,电磁铁加载头等对悬挂式测力天平施加稳定载荷,然后断开电磁铁电源实现负阶跃力加载。通过电磁铁对飞行器模型加载阶跃力可以避免采用熔线引入的非线性,最后根据功率谱方法拟合其频响函数曲线。
2 悬挂式测力天平原理
悬挂式测力天平[7]主要由框架,响应拉杆和飞行器模型组成,天平装配图,如图1所示。

图1 悬挂式测力天平Fig.1 The Suspended Balance
拉杆通过螺纹与飞行器模型连接,同时通过锥套与轮辐式传感器连接。轮辐式传感器通过螺栓与外部框架固定,作为约束。轮辐式传感器由轮圈,轮毂和轮辐条组成。轮辐条关于传感器中心上下对称,左右对称,共8个。传感器测量元件为应变片,粘贴于轮辐条的边缘,搭建成为惠斯顿全桥。
悬挂式天平的测力原理,如图2所示。风洞燃烧产生高速气流。气流会在飞行器模型表面形成流场,流场形成的气动力通过响应拉杆传递到轮辐式传感器。轮辐式传感器上的应变片变形,应变片的电阻变化转换为电压变化输出,从而推算相应的气动力。

图2 天平测力原理Fig.2 Balance’s Measurement Principle
3 天平动态标定实验
飞行器的动态特性在飞行器设计中起着非常重要的作用。由于测力系统的瞬态振动会对天平测试精度产生不可忽视的影响[8],若仅以静态标定曲线来进行风洞试验,得出的飞行器气动力结果误差较大。因此还需要对天平进行动态标定。
动态标定的目的是为了获取系统在动态激励下的输入输出信号。频响函数是输入输出信号关系在频域下的一种描述形式,用于表示系统的动力学特征。动态标定根据激励的形式不同主要可以分为脉冲响应,阶跃响应和频率响应。
阶跃响应一般通过对标定对象施加负阶跃力进行动态标定。首先对标定对象施加稳定的静态载荷,然后忽然移除该载荷实现负阶跃力的发生。该方法相较于脉冲响应和频率响应的优点是实现对标定对象加载的同时不会引入附加质量等干扰因素。
风洞试验中比较关心的三个方向为法向,轴向和飞行器俯仰力矩方向,针对这三个方向设计的标定装置,如图3所示。升力(Y)和俯仰力矩(Mz)方向标定装置关于飞行器模型的质心对称,标定装置上的顶尖窝安装有带顶尖的砝码托盘,通过四个托盘放置砝码数量的不同来施加法向和俯仰力矩方向的稳态载荷。砝码用于给天平施加准确,稳定的载荷,以模拟飞行器模型在风洞中所受的气动力,砝码的精度为1kg±1g。轴向(X)通过在飞行器尾部用定滑轮,托盘以及钢绳连接飞行器的尾部以实现矢量轴向的加载。具体加载力的实现方案如下:对四个托盘都放置等个数的砝码,实现负升力加载;对前两个托盘放置砝码,后两个托盘不放置砝码,实现俯仰力矩的加载;对尾部托盘放置砝码,实现飞行器阻力加载。

图3 标定装置Fig.3 Calibration Device
标定实验将电磁铁安装在加载头上,使电磁铁吸附放置有砝码的托盘向天平施加精确载荷,然后忽然断开电磁铁电源对天平进行卸载,从而实现对天平模型施加负阶跃力。具体加载装置,如图4所示。主要由加载头,S型传感器,弹性接头,托盘,电磁铁等组成。基于上述动态标定装置,具体实验步骤如下:

图4 加载装置Fig.4 Loading Device
(1)连接传感器,采集仪,稳压直流电源等,检查设备是否正常工作;
(2)在LMS软件中设置传感器参数,电磁铁供电,但不放置砝码,观察各传感器是否过载;
(3)放置砝码,待砝码摆动幅度较小,LMS示波较稳定时,启动数据采集,然后迅速使电磁铁断电移除载荷实现负阶跃力加载;
(4)数据采集系统同步记录输入信号和响应拉杆输出响应直至信号到达稳定。
重复上述过程,对天平做多组实验,以降低随机误差和人为误差的干扰。由于天平设计应变通常为(50~100)με,天平的输出信号非常微弱,易受环境噪声影响。因此在数据采集仪前端设置差分放大器,设置采样频率12.8kHz。
如前所述,飞行器模型,响应拉杆和框架构成风洞试验的整个测力机构。针对悬挂式测力天平的动态标定路径为“标定装置−天平−响应拉杆”。采用单通道加载方法,每次标定实验只对天平的一个加载方向进行动态标定实验。
由于频响函数各通道方向基理相似,下文以法向(Y)为例进行频响函数研究。对飞行器施加法向80kg阶跃载荷时,其中一个法向轮辐传感器输出结果,如图5所示。由图5可得,电磁铁释放时输出信号有明显阶跃现象,一段时间后信号又趋于稳定。

图5 法向响应Fig.5 Normal Response
4 频响函数
频响函数的定义为互功率谱函数除以自功率谱函数的商。但在实际测量中,动态标定实验数据不可避免地存在噪声。文献[9]给出了频响函数的功率谱估计法,以尽可能地降低估计偏差。频响函数的功率谱估计式,如式(1)所示:

式中:Gxy(f),Gxx(f),Gyy(f),Gyx(f)—传感器输入信号x(t)和y(t)的自功率谱和互功率谱。
由于输入信号与输出信号不可避免掺入噪声,所以x(t)的自功率谱和y(t)的自功率谱为过估计而互功率谱基本不受影响。因此,HU(f)—欠估计,HO(f)—过估计,取两者平均值作为频响函数能有效降低估计误差。
在实际研究中,采用法向80kg 阶跃载荷数据作为输入数据,单个法向轮辐传感器数据作为输出数据,功率谱估计方法得出的频响函数,如图6所示。频响函数很明显地呈对称状态,频率点不清晰。

图6 功率谱估计法频响函数Fig.6 Power Spectrum Estimation Method
从时域信号分析,功率谱方法需要对阶跃响应进行截取有限长的信号做离散傅里叶变换。截取的信号通常为非整周期信号,而离散傅里叶变换由于其特性会将截取的信号视为周期延拓信号进行处理,引起周期延拓边沿问题,这与传感器的动态特性矛盾。虚线即为延拓的周期,如图7所示。

图7 阶跃响应周期延拓Fig.7 Cycle Extension
从频域信号分析,以抽样脉冲作为冲击序列(即理想抽样)[10],设抽样脉冲为p(t),连续信号为f(t)。fs(t)=f(t)p(t)即为采样信号,由于p(t)是周期采样信号,p(t)的傅里叶变换,如式(2)所示:

式中:Pn—p(t)的傅里叶级数的系数。根据频域卷积定理可得式(3)。

将式(2)代入式(3),得到抽样信号的频域表达式,如式(4)所示。

由式(4)可得,信号被时域抽样后,它的频谱Fs(w)也会以以抽样频率ws为间隔周期重复。在重复的过程中被傅里叶系数Pn所加权,所以重复的过程中幅值不会改变。推测由于阶跃信号的频率成分复杂,频率信号在周期延拓时发生了混叠,从而导致频响函数呈现对称的状态。
为了减小周期延拓影响,采用布莱克曼窗和数据段重叠对数据段进行处理后再利用功率谱方法进行频响函数估计。窗函数是用于减少频谱泄露的一般方法,这里采用布莱克曼窗对数据段进行处理。布莱克曼窗的开始和结尾端都趋于零,阶跃响应低频数据段加窗后可以改善其周期延拓现象。但布莱克曼窗会使得加窗后信号的开始和结束端丢失了一些样本,而通过改变时间样本的重叠率可以使得丢失的样本刚好处于缩减的幅值区域附近。加窗重叠后的频响函数,如图8所示。由图8可得,窗函数规避了周期延拓问题,频率点清晰,第一阶频率大于50Hz,说明天平的刚性较好。

图8 加窗后的频响函数,50%重叠Fig.8 Frequency Response Function after Windowing,50% Overlap
为了进一步探究测力天平动态输出的准确性,数据段采用极点留数拟合时域传递函数。以时域输入与传递函数的乘积作为拟合曲线,观察实测传感器响应数据与拟合曲线的相似程度,以判断天平输出和频响函数可靠性。
虚线为实测输出响应,实线为拟合曲线,如图9所示。由图9可得,实测数据与拟合曲线在阶跃部分重合情况较好,振荡过程重合情况较差,待数据较为稳定后重合的情况又逐渐变好。计算得出实测数据与拟合曲线的在振荡环节前和振荡趋于稳定时的重合度为91.7%,整个时域的重合度度为79.9%。振荡部分数据拟合较差的两个原因:系统结构振荡时,噪声的频谱通常也发生变化;振荡数据的高频成分较多,而采集和处理数据时过滤了一部分高频数据,对频响函数做了一定修正。
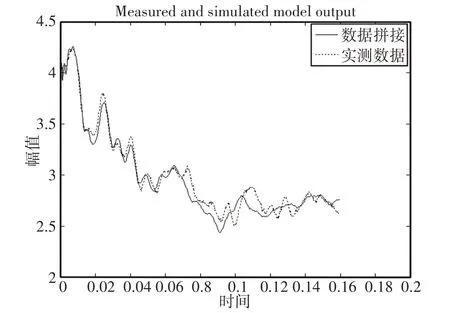
图9 时域输出验证Fig.9 Verification of Time Domain Output
5 结论
这里研制了一种针对悬挂式天平的动态标定装置,采用电磁铁对飞行器模型施加负阶跃载荷以避免现行熔线方法引入的非线性,利用频响函数评估悬挂式测力天平动态特性。根据功率谱估计法辨识频响函数时发现频响函数呈对称性,频率点不清晰。研究频响函数的计算过程发现时域和频域信号均存在周期延拓现象。采用布莱克曼窗和数据段重叠预处理数据后的频响函数规避了周期延拓引入的误差。进一步利用极点留数拟合时域传递函数,将传递函数与输入数据乘积作为拟合响应曲线。通过拟合曲线与实测数据的对比,拟合曲线在振荡前以及振荡趋于稳定后的重合度为91.7%,表明天平在低频时非线性干扰较小,该天平可以用于风洞试验测试。这里研究为该类天平的进一步研究提供了必要的实验基础。