基于LMI的DC/DC变换器鲁棒模型预测控制
2022-04-28王晓兰贾启明
王晓兰,贾启明
(兰州理工大学电气与控制工程国家级实验教学示范中心,甘肃 兰州 730050)
DC/DC变换器通过开关器件的导通与关断来实现电压变换,作为直流电源、负荷、储能与直流母线间的重要媒介,DC/DC变换器的输出电压纹波小、状态稳定是衡量控制器的重要性能指标之一。在系统实际运行过程中存在干扰因素,导致输出电压的状态不稳定或有较大的纹波,输出电压质量不高,非常不利于后级载荷的安全稳定运行[1-4]。
针对控制DC/DC变换器的问题,文献[5-7]采用传统的比例积分(proportional integral,PI)控制方法,通过电压、电流双闭环的控制策略实现直流变换器控制,同时根据主要参数的设计与选择实现直流增益优化。Kothare于1996年提出一种基于线性矩阵不等式(linear matrix inequality,LMI)的鲁棒模型预测控制(robust model predictive control,RMPC)综合方法,使得整个控制系统在受到干扰时仍能保持比较稳定的状态[8]。针对系统在实际运行时不可测因素对输入量带来影响的问题,文献[9]提出RMPC策略,通过对系统进行分析,将影响输入量的因素进行优化,将优化结果带入系统模型中进行控制,可以提高对系统状态的跟踪能力,并且有效降低系统误差。针对复杂环境下系统的模型精度低、鲁棒性差等问题,文献[10]设计了一种基于自适应模型预测理论的轨迹跟踪控制策略,分析约束条件,设计预测时域内的代价函数,保证系统的时效性。考虑在实际运行中干扰因素对系统的影响,文献[11]对约束条件进行优化,使运行状态收敛到期望的平衡点,该控制策略保证了对系统中由干扰因素带来影响的有效补偿。针对系统运行中由不确定性因素造成的状态时滞问题,文献[12]设计一种新的模型预测控制器来近似时滞延迟,在系统建模时考虑时滞系统的上下界,保证了闭环系统的鲁棒性。针对系统实际运行状态与理想状态的相关性以及运行效率的问题,文献[13]提出基于RMPC的弹性运行策略,建立优化决策模型,再求解最小-最大问题。针对模型不确定性问题,文献[14-15]设计一种RMPC策略,将含不确定性约束的优化问题转化为最小-最大问题的求解,并最终将其转化为二次规划问题来求解。针对线性系统的不确定性的问题,文献[16]提出一种RMPC方法,对控制系统施加一些稳定性限制,将其包含在RMPC策略处理的一组约束中,从而使系统达到稳定状态。文献[17]对模型估计程序的数据施加一些特定条件,限制了数据的实际使用条件,为此,提出一种新的数据驱动控制方法,即将数据驱动的概念集成到RMPC架构中,由此实现递归可行性和稳定性。针对一类线性离散时滞系统的问题,文献[18]提出具有主动补偿机制的RMPC方法,通过Lyapunov稳定性理论来解决一组线性基质不平等问题;此外还考虑了不确定性问题,可大大降低控制器的保守性,保证闭环系统的稳定性。文献[19]采用基于LMI的离线输出反馈鲁棒预测算法对系统进行控制,这种控制策略可以减少在线运算量,并且通过状态重构形成新的状态变量,实现系统控制快速性,保证系统的鲁棒性。
以上文献所采用的RMPC方法对受未知扰动的系统均能进行有效控制,但难以建立考虑系统在实际运行中受扰动因素的模型[20]。因此,本文设计反馈控制,即将DC/DC变换器的状态空间模型转化为对应目标函数的状态变量模型,再通过LMI[21]使系统渐近稳定,以消除系统中存在的稳态误差;针对系统实际运行时存在的干扰因素设计观测器,并结合原系统运行状态建立估计模型,使干扰因素带来的不利影响逐渐趋于0;设计一种将观测器嵌入反馈控制的控制器,利用MATLAB对该控制器进行数值仿真,以验证所提控制策略的可行性。
1 Boost变换器状态空间平均模型
Boost变换器如图1所示,其中:uin为输入电压;C为电容;R为电阻;L为电感;iL为电感电流;uo为输出电压;VT为开关管;VD为二极管。

图1 Boost变换器Fig.1 Boost converter
令D为Boost变换器的占空比,根据在1个周期Ts中的运行状态列写状态方程。
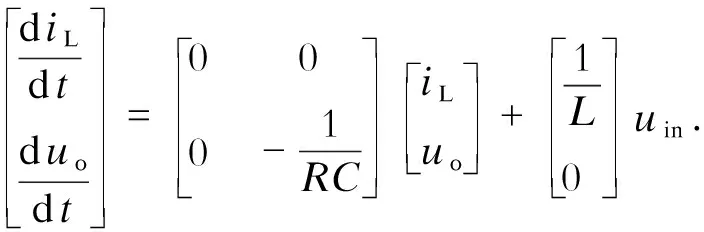
(1)
式中t为时间。
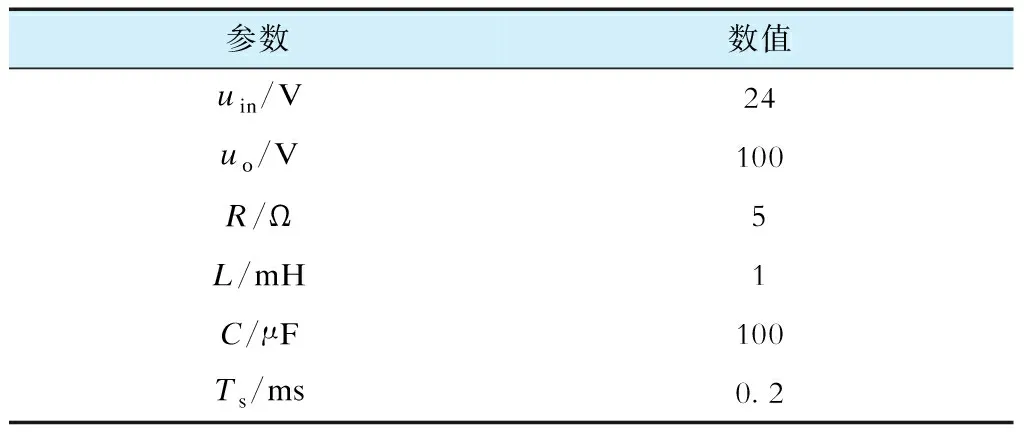
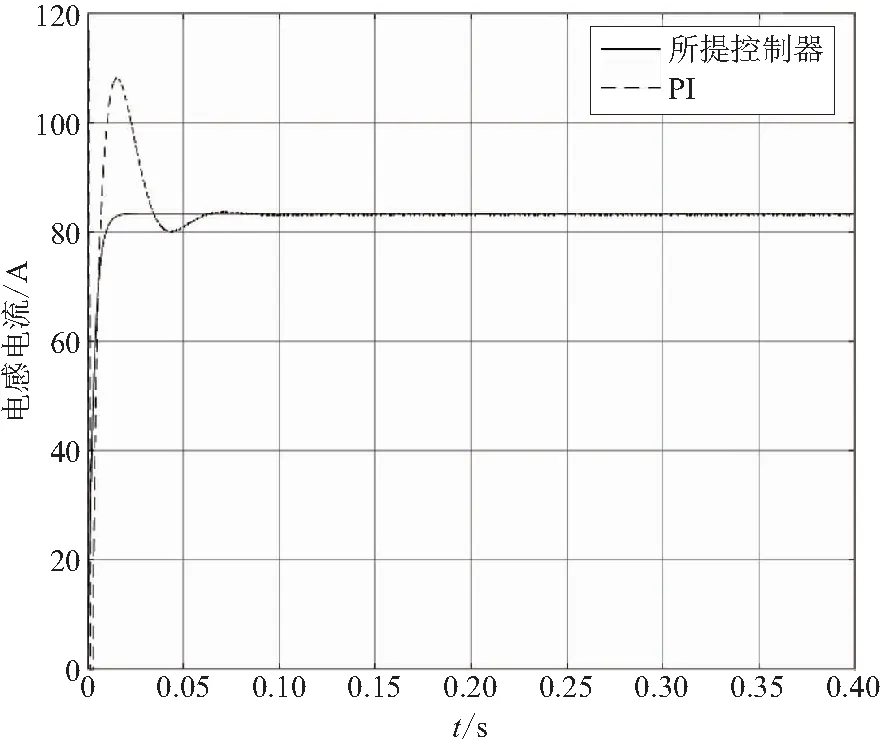
b)在DTs (2) 将状态方程经平均化处理后表示为: (3) 式(3)可以写成 (4) 图2 控制结构Fig.2 The control structure 首先在原控制系统基础上设计反馈控制,并建立目标函数求取可行解;然后通过可行解证明本文所设计控制器的闭环系统稳定性;最后设计控制对象的观测器,并将其带入反馈控制中,保证闭环系统的稳定性。 图3 反馈控制结构Fig.3 Feedback control structure 运用状态反馈控制对变换器实际输出电压与理论值的偏差不断进行修正,使其实际输出更接近理论值,从而对变换器进行控制。 通过建立模型预测控制的目标函数,求解控制对象在约束条件下的可行解或者在可行域内的最优解。对式(4)系统建立如下目标函数 u(k+i|k)TRu(k+i|k)]. (5) 式中:Q1为对称半正定矩阵或正定矩阵;R为正定矩阵;x(k+i|k)表示基于k时刻的k+i时刻状态的预测值;u(k+i|k)表示在k时刻优化的控制输入在k+i时刻的值。 定义Lyapunov函数 V(x)=xTPx. (6) 式中P为半正定矩阵。 通过选择Lyapunov函数,满足xTPx是目标函数的一个上界,即 (7) 状态反馈u=Kx使得Af=A+BK是渐近稳定的,可满足矩阵中全部元素的最大值λmax(Af)≤γ,其中γ为目标函数的性能指标上界。 假定系统状态的精确测量值在每个采样时刻k都是可用的,即 x(k|k)=x(k) (8) 成立,那么可以得到 V(x(k|k))=V(x(k)). (9) 令Q=γP-1,运用Schur补定理将λmax(Af)≤γ与V(x(k))结合之后转化为 (10) 在采样时刻k,对于线性时不变系统可以使V(x(k))满足下列鲁棒稳定性约束不等式: V(x(k+i+1|k))-V(x(k+i|k))≤-J∞(k). (11) 推导得到相应的状态反馈控制律 u(k+i|k)=Kx(k+i|k). (12) 当不等式 (A+BK)TP(A+BK)-P+KTRK+Q1≤0 (13) 成立时,令P=γQ-1,K=YQ-1,根据Schur补定理转化计算得到 (14) 式中I为单位矩阵。 通过将Q1矩阵与R矩阵带入黎卡提矩阵方程中,可以计算得到矩阵P,即 ATP+PA-PBR-1BTP+Q1=0. (15) 为了分析闭环系统的稳定性,首先需要证明系统状态的精确测量值在k时刻的可行解,在t>k时依然是可行的。 根据式(8),同理可以得到在k+1时刻对应的等式 x(k+1|k+1)=x(k+1). (16) 结合式(4)、(7)、(16),计算得到 x(k+1|k+1)=x(k+1|k). (17) 式(17)说明系统状态的精确测量值在k时刻的可行解,在t>k时依然可行。 对式(6)系统建立函数 V(x(k|k))=x(k|k)TPkx(k|k). (18) 式中Pk为k时刻的最优解,且Pk>0,参照式(16)的说明,Pk也是k+1时刻优化问题的可行解。 在式(18)基础上建立k+1时刻对应的函数 V(x(k+1|k+1))= x(k+1|k+1)TPk+1x(k+1|k+1). (19) 结合式(18)、(19),根据最优解与可行解的关系可以推算得到 x(k+1|k+1)TPk+1x(k+1|k+1)≤ x(k+1|k+1)TPkx(k+1|k+1). (20) 结合式(17)、(18)、(20),推导计算得到 x(k+1|k)TPkx(k+1|k)≤ x(k|k)TPkx(k|k). (21) 结合式(20)、(21),推算得出 x(k+1|k+1)TPk+1x(k+1|k+1)< x(k|k)TPkx(k|k). (22) 式(22)成立,说明闭环系统Lyapunov二次函数随着t的增长而严格递减,由此证明闭环系统是渐进稳定的。 对式(4)系统,建立对应观测器的模型 (23) 对式(23)系统,设计带观测器的反馈控制结构,如图4所示。 图4 带观测器的反馈控制结构Fig.4 Feedback control structure with the observer 定义误差估计模型 (24) 结合式(4)、(23)、(24),推算出误差估计模型 (25) 状态观测器是通过极点配置来设计增益矩阵的,这就需要观测器的极点可以任意配置,条件是原被控系统状态完全能观。运用LMI工具箱计算得到 (26) 为评估所设计基于LMI的RMPC系统的动态响应性能以及运行过程中的鲁棒稳定性,在MATLAB/Simulink仿真环境中搭建图1所示变换器的仿真模型,电路参数见表1。对基于LMI的RMPC策略与传统的PI控制进行仿真,并对比分析仿真结果。 表1 系统参数Tab.1 System parameters 给定电源电压为24 V,输出电压参考值为100 V,并且保持负载电阻5 Ω不变。分别采用基于LMI的RMPC策略与PI控制,得到变换器电感电流和输出电压的响应性能如图5、图6所示。 图5 电感电流的响应性能Fig.5 Response performance of inductive current 图6 输出电压的响应性能Fig.6 Response performance of output voltage 从图5可以看出:基于LMI的RMPC策略下,Boost变换器电感电流经过0.04 s逐渐上升至稳定值83.34 A,无超调,系统到达稳定状态后,输出电压无明显振荡;在PI控制下,Boost变换器的电感电流最大值为108.9 A,最小值为80 A,经过0.12 s到达稳定状态,超调量为33.7%,电感电流振荡区间为83.1~83.3 A。 从图6可以看出:基于LMI的RMPC策略下,Boost变换器的输出电压经过0.03 s逐渐上升至输出电压参考值100 V,无超调,稳定后输出电压无明显波动;在PI控制下,Boost变换器的输出电压最高值为108.58 V,最低值为98.88 V,经过0.1 s恢复到输出电压目标值100 V,超调量为8.58%;输出电压振荡区间为99.8~100.15 V。 与PI控制相比,基于LMI的RMPC策略下,电感电流和输出电压的超调量小,到达稳态的时间短,动态响应快,输出电压纹波小。因此,采用所提策略的控制系统动态响应性能更好。 通过给负载施加阶跃扰动进行仿真,测试所提策略的抗干扰能力,同时与PI控制仿真结果对比。在保持输入电压24 V和输出电压参考值100 V不变的情况下,当系统运行到0.2 s时,Boost变换器的负载由5 Ω突变为6 Ω,得到如图7、图8所示的电感电流和输出电压波形。 图7 负载扰动时电感电流波形Fig.7 Inductive current waveforms under load disturbance 图8 负载扰动时输出电压波形Fig.8 Output voltage waveforms under load disturbance 从图7可以看出,扰动发生后:在所提策略下,Boost变换器的电感电流经过0.03 s恢复到新的稳定值69.5 A,没有超调量,受扰后动态响应快,系统到达稳定状态后电感电流无明显振荡;在PI控制下,Boost变换器的电感电流下降至63.35 A,经过0.15 s后恢复到稳定值69.5 A,超调量为8.8%,受扰后动态响应快,系统到达稳定状态后电感电流振荡区间为69.3~69.6 A。 从图8可以看出,扰动发生后:在所提策略下,Boost变换器的输出电压升高至112.24 V,然后恢复到输出电压参考值100 V,扰动后到达稳态时间为0.07 s,输出电压无超调,系统到达稳定状态后输出电压无明显振荡;在PI控制下,Boost变换器的输出电压升高至129 V,最小值为96.79 V,扰动后到达稳态时间为0.15 s,稳定后的输出电压值为参考值100 V,超调量为29%,输出电压振荡区间为99.8~100.15 V。 对比图7、图8可以看出,在基于LMI的RMPC策略作用下,电感电流无超调,输出电压超调较小,输出电压纹波小,扰动后重新达到稳态时间短,动态响应快。因此,采用所提策略的控制系统鲁棒稳定性更好。 给变换器施加输入电压扰动,保持负载电阻5 Ω、输出电压参考值100 V不变的情况下,在0.2 s时变换器输入电压由24 V变为29 V,分别采用基于LMI的RMPC策略与PI控制进行仿真,得到输入电压变动情况下输出电压的响应性能如图9所示。 图9 输入电压扰动情况下的响应性能Fig.9 Response performance under output voltage fluctuation 从图9可以看出:在0.2 s时加入输入电压扰动,输出电压随着增大;采用基于LMI的RMPC策略时,输出电压最大上升至104 V,超调量为4%,稳定后无明显波动,受到扰动后0.02 s到达稳定状态;采用PI控制时,输出电压最大上升至107.15 V,最小为97.65 V,超调量为7.15%,波动范围为99.9~100.1 V,到达稳态的时间为0.15 s。 与PI控制相比,所提策略的输出电压纹波小,超调量小,受扰后重新到达稳定状态的时间更快。在实际应用中,输出电压的纹波数值越小表示输出电压质量就越高,对比可以看出,基于LMI的RMPC策略比PI控制方法的输出电压质量高。系统动态响应这一性能主要体现在系统运行过程中到达稳定状态的时间和受扰动后重新到达稳定状态的时间,时间越短表明控制性能越好,同样可以看出,所提策略比PI控制方法的控制性能好。 本文旨在解决DC/DC变换器在实际运行情况下输出电压状态不稳定、纹波大、质量较低导致系统性能较差的问题,提出一种基于LMI的RMPC策略,通过将观测器嵌入反馈控制来降低系统实际运行中由电磁干扰等因素带来的误差影响,在使变换器输出电压质量满足要求的同时,保证系统在受到扰动时依旧能保持稳定运行状态。运用MATLAB对所提策略进行仿真,并与PI控制的仿真进行对比,结果表明其控制性能更好,可以保证系统的鲁棒稳定性。

2 设计基于LMI的RMPC


2.1 设计系统反馈控制律


2.2 证明闭环系统稳定性
2.3 设计带观测器的反馈控制





3 仿真结果分析
3.1 电感电流和输出电压的响应性能

3.2 考虑负载扰动时的响应性能


3.3 输入电压扰动情况下的响应性能

4 结束语