某型自动舵分罗经航向误差大故障分析与处理
2022-04-28谭志杨邹丑田钟多就
谭志杨,邹丑田,钟多就
(1.91902部队,广东 广州 510320;2.92326部队,广东 湛江 524002)
近几年,随着信息技术的应用日益广泛和深入,带有微机控制的罗经同步涌现。但对于许多在航船舶来说,整机更换传统的罗经显然代价极大,因此在原有系统上,进行部分环节的数字化改造,以适应船舶设备各位置对航向信息的数字化需求,这是十分可行和必要的。如何进一步提升罗经航向信息的提取和利用,更好服务于船舶航行,已成为当前许多船舶要着手考虑的问题之一。在深入进行数字化改造应用的同时,许多设备出现了不少数字化改造后的故障,与传统模拟电路故障有着本质上的差别。本文以某型自动舵出现分罗经航向误差大的典型问题进行了分析和处理,对类似数字化改造后设备故障的发生规律有了进一步的认识,从而也为今后类似故障问题的分析积累了参考经验。
1 故障现象
该罗经系统是利用电磁控制方式使陀螺仪实现自动找北并稳定指北的一种航海仪器,它具有“罗经”和“方位仪”2种工作状态,其具有启动时间短、惯性误差小、可在高纬度使用、体积小、重量轻等优点,因此迅速成为船舶指向的主要罗经系列之一[1]。该罗经系统由主罗经及其附属仪器组成,主罗经为主要部分,具有航向指示的性能,附属仪器是确保罗经正常工作的必须设备。为了能在船舶需要的地方复示航向,在整套罗经中,设置了多个分罗经。
该罗经系统在码头且不启动陀螺仪的情况下,模拟航行时航向的变化,用手慢慢拨动方位环,每隔10°分别记录下主罗经和自动舵分罗经的航向,出现自动舵分罗经接收航向信号不固定误差的故障现象,精粗刻度盘反复左右跳变剧烈。进一步整理航向检查记录(0°~ 210°)8个点的航向记录,发现误差范围为+3°~ -1°,已出现极大超差现象,系统已无法正常使用。把主罗经的航向值,进一步与自动舵罗经、分罗经、雷达设备、显控台设备航向显示对比,通过统计可知,只有自动舵分罗经误差为最大+3°,已影响了系统正常工作。其他用户中的分罗经最大误差为+0.1°,雷达设备、显控台设备航向显示均无误差存在。
2 故障原因分析
该改进型罗经航向发送和接收系统有如下特点。一是用户多,模拟分罗经达到21个,数字用户达到10个,且数字用户和模拟用户交混。二是航向信号产生、发送和接收与常用同步系统在配套方式上存在差异。原本在未进行数字化改造情况下,排除类似自动舵分罗经航向误差大的故障是常见故障。但数字化改进后,出现类似故障,除了通常原因外,不得不考虑内部数字处理的原因。对此,需要单独分析一下数字和模拟航向信号发送与接收传输通道异同,为故障排除奠定一定原理基础,模拟通道航向发送与接收流程图如图1所示。
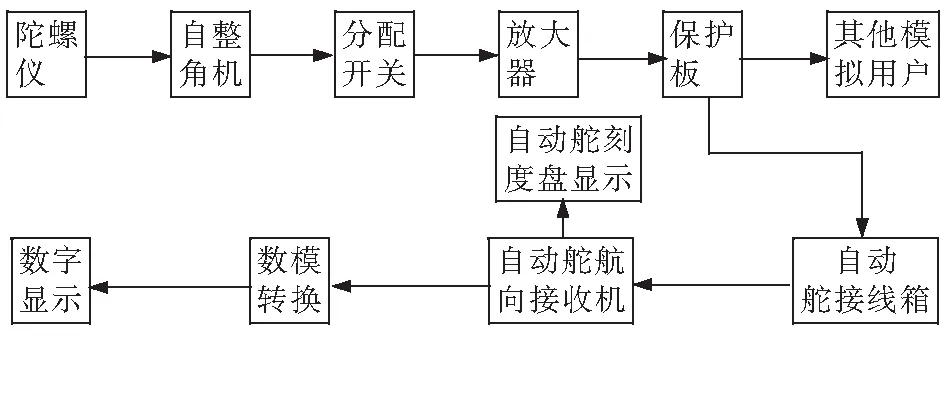
图1 模拟通道航向发送与接收流程图
从图1可知,陀螺仪通过齿轮机械组带动自整角机一起转动,航向发送机则产生三相同步信号,通过分配开关,经放大、保护环节后,输送到模拟用户。同时,从航向发送箱里发送航向信号至自动舵接线箱,再到主操台上的航向接收机,一路经过自动舵刻度盘显示,另外一路经过数模转换用作数字显示。
数字通道航向发送与接收流程图如图2所示,陀螺仪通过齿轮机械组带动旋转变压器一起转动,产生航向正余弦信号,经数模转换,送到微机主板上进行处理。写入程序的芯片通过总线与微机保持通信。通过补偿非线性误差、温度漂移误差等方式,不断比对和修正每0.1°航向的变化,以减少对系统误差造成的影响。最终形成的航向数字信号,从微机接口板经串行接口板电路输出到各个数字用户。
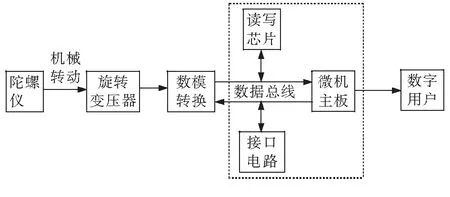
图2 数字通道航向发送与接收流程图
从以上2种不同通道的航向发送与接收的原理流程图分析可知,罗经的航向信号发送到模拟用户,包括自动舵,属于统一的信号,自动舵分罗经需要数字显示时,末端使用数模转换即得到数字航向信号。数字航向信号也是在罗经内部就实现了数字信号的统一传输。然而,本船的改进型自动舵分罗经航向接收信号属于2个通道交织在一起的情况,先是接收模拟航向,后又在内部进行了数模的转换,最后显示的是数字信号航向。
依据上述原理分析,造成自动舵模拟航向不匹配的原因可能会有:自动舵分罗经这路的信号传输通道有接触不良或开路点;位于自动舵主操台上的航向匹配开关,被经常使用导致了损坏或触头接触不良;自动舵分罗经上的航向接收机齿轮组因使用强度大导致的磨损造成了间隙大或下端的阻尼轮存在失效的可能。同时,造成数字航向误差大的可能原因有:不排除上述的机械部分存在故障,再者就是微机主板上内部程序数据出错,或者是数据通信接口板存在故障[2]。
3 处理措施
基于以上原理分析,针对此故障展开排除处理。归纳总结分为以下几个步骤。
1)对航向复示精度进行匹配复验。一般匹配复验,不需要每个分罗经用户都检查复验,否则工作量就比较大。只需要匹配复验导航雷达、综合导航显控台与主罗经上所显示的航向数值以及左右船舷上的分罗经模拟显示。此时,导航雷达、综导显控台与主罗经显示屏上数值显示是一致的。检查自动舵航向显示装置发现,自动舵分罗经、主罗经、刻度盘3者显示均不一致。那么基本能判定,在自动舵分罗经传输这条分路上存在故障。
2)检查排除机械原因引起的误差。尤其是对此类较为老旧的设备,因使用强度导致的误差和故障发生概率会大大增加。针对可能性比较大的罗经机械传动齿轮组、旋转变压器和接插件、接线等部位进行检查,均未发现异常,即使有磨损间隙,带来的误差也不至于导致系统无法使用,由此可排除机械方面信号线路不牢固或线路开路方面问题。
3)查验分罗经与自动舵连接上是否存在故障。在日常维修过程中,经常会采取另外接一个工作正常的标准分罗经的方式,以此能够快速查找和排除共同部分存在故障的可能。将自动舵主操台上接收机的激磁线和信号线拆下来,一对一连接上标准分罗经。通上电源后,发现标准分罗经同样发生了跳变故障,只是程度有所减弱。由此可排除罗经航向发送箱至自动舵接线箱存在故障的可能,也可断定自动舵的内部线路存在故障点的可能性极小。再次恢复线路,重新通电,故障复现。
4)进一步检查航向接收机周边线路。可推断,故障点可能会集中在航向接收机周边线路上。拆开接收机上2个固定压板后,拔出接收机,发现接收机的阻尼轮已松动脱落。这个阻尼轮起到的作用类似微分原理,能够进一步稳定接收机转速,当航向失配到即将同步时,阻尼轮可让接收机平稳停下来,以达到稳定接收机转速的作用。安装并紧固阻尼轮后,经通电检查,航向不稳定跳动仍然没有得到彻底有效解决。
5)检查数字航向信号发送通道关键点。从测量的接收电机信号可知,0~50 V时电压有跳跃现象,用示波器观察三相信号,发现正弦波上叠加了很大的尖脉冲,而且还伴随着不规则的反向波形。由此,进一步检查数字航向信号发送通道,追踪到微机板的输入端。首先,更换了处理芯片,但故障现象并没能得到排除。接着,根据数字通道航向发送与接收原理分析,怀疑主板上的可读写存储器的航向修正功能可能会导致故障出现。用擦除器将原程序擦除,重新写入备份。最后,开机检查,发现故障得以彻底排除。
综合分析,接收机上的阻尼轮脱落,并不是此故障的主要原因,且具有迷惑性。从上述故障排除过程可知,内部软件数据出错是此故障的主要成因,也应是此类数字化改进后自动舵分罗经航向发生故障主要考虑点之一。
4 结束语
综合本故障实例分析与处理,本故障既有硬件方面阻尼轮脱落的部分原因,也有软件程序上的数据出错原因。当前,我们常规的维修保养集中于硬件保养,即对某个器件或某个模块进行保养。在软件程序上出现错误,可能被认为读写存储器中的航向误差修正参数不具有自我修改的可能性。但随着电子技术的发展和广泛应用,设备上应用软件的隐形故障或数据冗余处理,将会是设备以后维护保养的重点。本案例当中,微机主板的存储器中航向误差修正参数出错,就明显属于内部软件数据出错。但对于一种应急处理,如果将系统当中的微机主板更换了,确实可以排除故障,但是维修成本将会大大提高。只有找准了主要原因,将程序重新写入,纠正内部软件数据错误,故障方可得到排除,这也将极大缩小维修成本。
